从STM32开始的RoboMaster生活:进阶篇 III [UART & USART]
1.0 什么是UART和USART?有什么区别嘛?
1.1 UART定义
Universal Asynchronous Receiver/Transmitter:通用异步收发传输器,是一种串行异步收发协议,应用十分广泛。UART工作原理是将数据的二进制位一位一位的进行传输。在UART通讯协议中信号线上的状态位高电平代表’1’低电平代表’0’。当然两个设备使用UART串口通讯时,必须先约定好传输速率和一些数据位。分类属于并行传输,通常1字节数据的8位同时传输,结束后再继续传第2个字节,如同波浪一般,一波一波传输。
1.2 UART与USART的区别
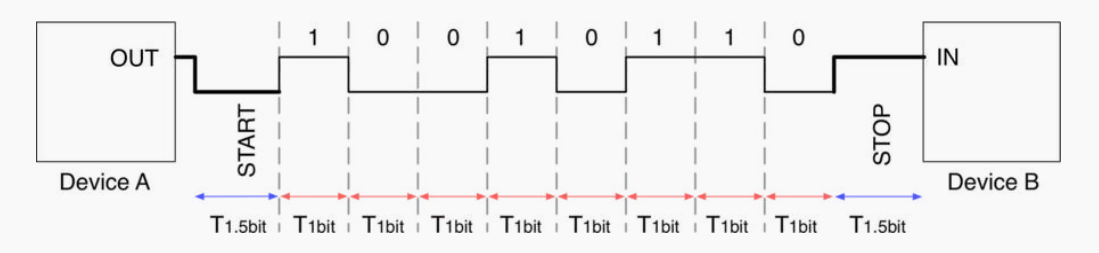
从图上可以看出整个传输过程。首先,在没有数据传输任务的时候,互相之间都是高电平 ( 1 ) ,然后,在有传输任务的时候,有1.5字节宽的起始信号,然后开始传输真正的信号,结束任务后,再给1.5字节宽的结束信号,最后回归没有数据传输的高电平。
- USART <-- Universal Synchronous/Asynchronous Receiver/Transmitter 通用同步异步接收发送器
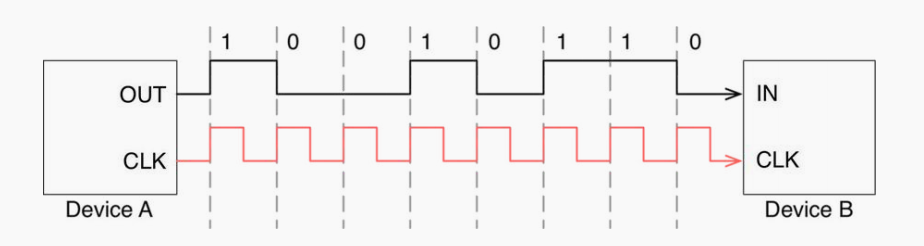
USART是UART的升级版,区别在于多了CLK线,在CLK没有信号的时候,就表明没有数据传输任务,有CLK信号的时候,就是正在传输信号,并且CLK提供了时钟同步功能,效验也更精确。但在实际使用的时候,其实并不会感觉UART和USART有很大的区别,除非接触非常底层的东西。
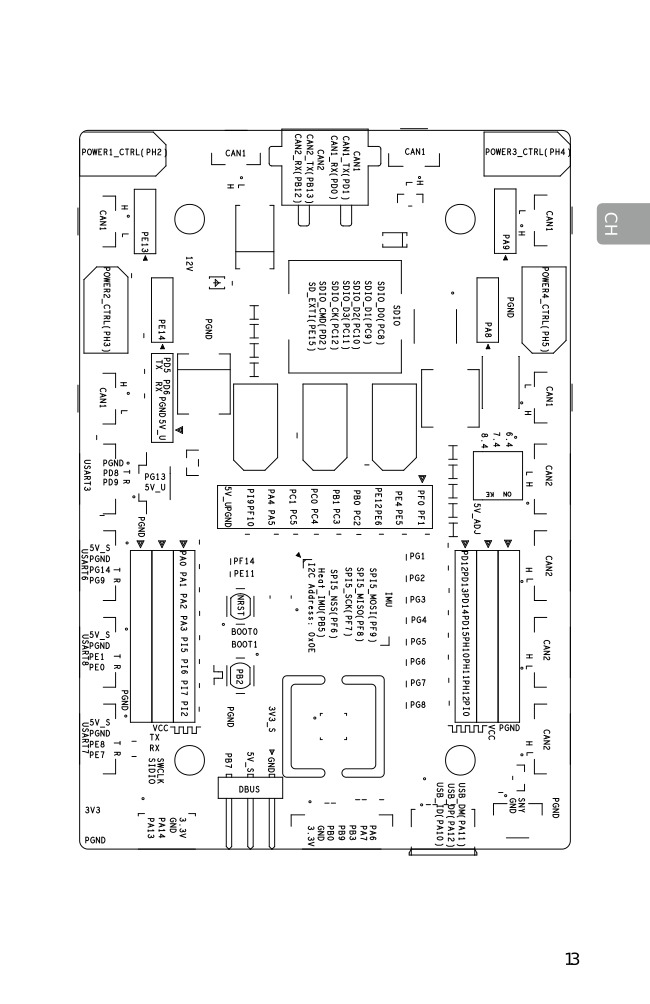
2.0 UART和USART在哪里?
-
UART
尽管大疆第一个图中标明的是USART7,但是其实只能使用异步通讯,也就是普通的UART。
尽管大疆第一个图中标明的是USART8,但是其实只能使用异步通讯,也就是普通的UART。
-
USART
-
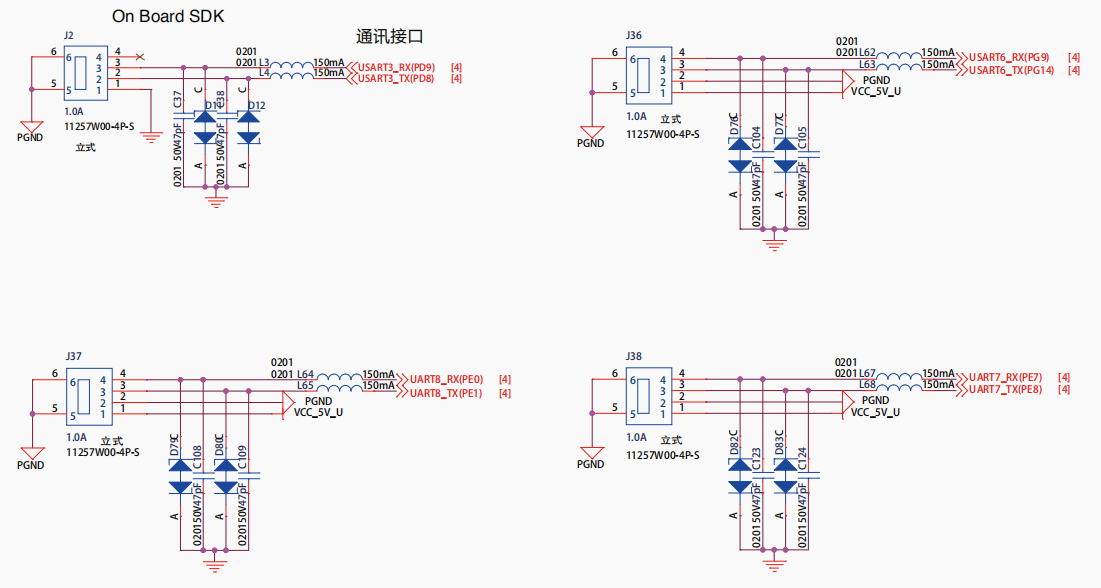
DJI ON BOARD SDK
这个是大疆预留的官方接口,与一般的USART的接线不同,不能直接使用,也不推荐使用。
3.0 UART和USART有啥用?
-
与PC端通讯
可以作为Debug的一种手段,或者监控数据流通的方法。
-
与其他设备通讯
比如两个MCU互相通讯,也就是作为主从机来使用。
4.0 UART和USART的两种不同使用模式
4.1 Polling
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
- 参数
huart:指向UART引脚配置结构体pData:指向需要传输的字符串Size:传输数据的字节大小Timeout:最大等待完成时限,单位为毫秒,也可以用HAL_MAX_DELAY来直接无限等待
- 返回值
HAL_StatusTypeDef:如果在时限之类完成,则返回HAL_OK,如果没有,则返回HAL_TIMEOUT
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
- 参数
huart:指向UART引脚配置结构体pData:指向需要传输的字符串Size:传输数据的字节大小Timeout:最大等待完成时限,单位为毫秒,也可以用HAL_MAX_DELAY来直接无限等待
- 返回值
HAL_StatusTypeDef:如果在时限之类完成,则返回HAL_OK,如果没有,则返回HAL_TIMEOUT
4.2 Interrupt
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
- 参数
huart:指向UART引脚配置结构体pData:指向需要传输的字符串Size:传输数据的字节大小
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
- 参数
huart:指向UART引脚配置结构体pData:指向需要传输的字符串Size:传输数据的字节大小
这里的函数并不是直接接收数据,而是表明开启UART的Interrupt模式
接收完数据后,该UART的Interrupt模式会自动关闭,需要再手动开启
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) {
......
}
- 在写代码的时候,在
main.c中创建HAL_UART_TxCpltCallback函数
- 在该函数中填写如果发生UART发送中断结束后,需要执行的代码
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
......
}
- 在写代码的时候,在
main.c中创建HAL_UART_RxCpltCallback函数
- 在该函数中填写如果发生UART接收中断结束后,需要执行的代码
5.0 练习项目
5.1 项目简介
- 电脑控制LED灯:在电脑上按下r,反转红色LED状态,按下g,反转绿色LED状态,按下1~8,反转对应的LED1~8的状态,并且返回打印反转的LED灯号
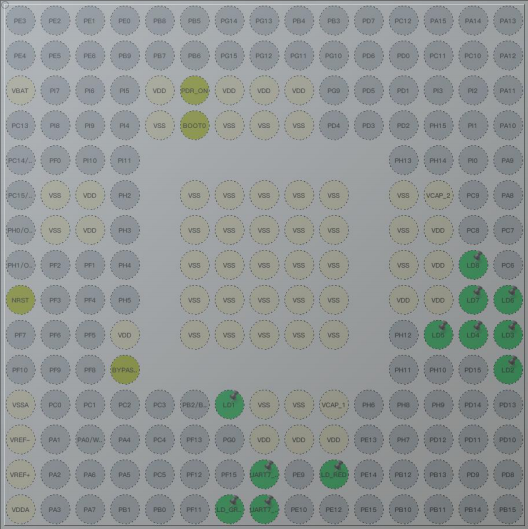
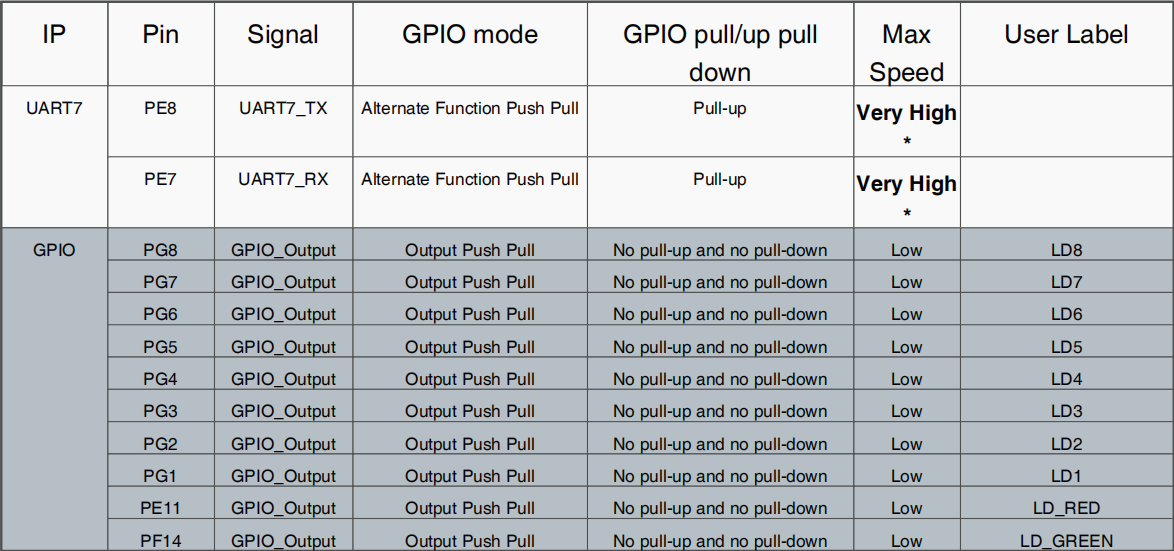
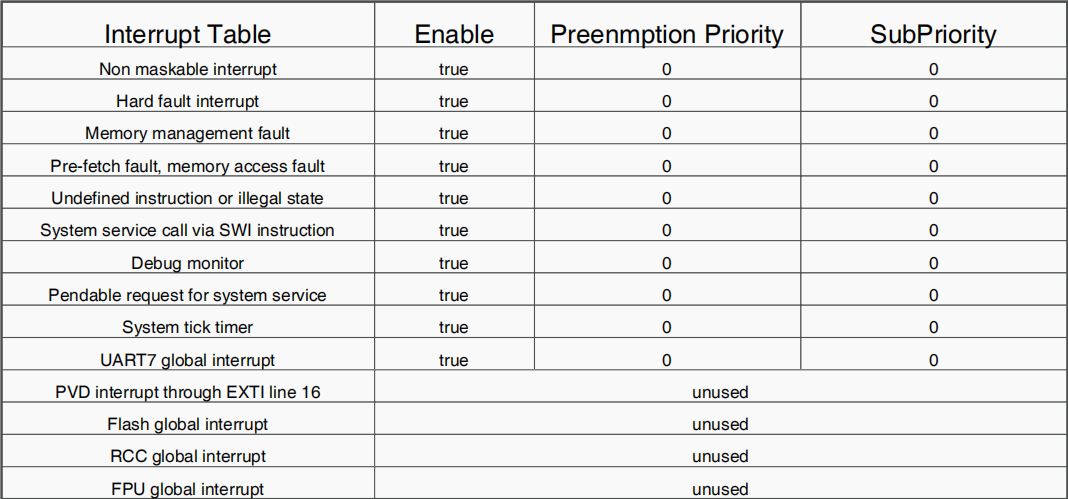
5.2 芯片配置
5.3 项目代码
- 我只放了
main.h和main.c,完整的工程文件可以在这里找到!
Inc/main.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2020 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx_hal.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
/* Private defines -----------------------------------------------------------*/
#define LD8_Pin GPIO_PIN_8
#define LD8_GPIO_Port GPIOG
#define LD7_Pin GPIO_PIN_7
#define LD7_GPIO_Port GPIOG
#define LD6_Pin GPIO_PIN_6
#define LD6_GPIO_Port GPIOG
#define LD5_Pin GPIO_PIN_5
#define LD5_GPIO_Port GPIOG
#define LD4_Pin GPIO_PIN_4
#define LD4_GPIO_Port GPIOG
#define LD3_Pin GPIO_PIN_3
#define LD3_GPIO_Port GPIOG
#define LD2_Pin GPIO_PIN_2
#define LD2_GPIO_Port GPIOG
#define LD1_Pin GPIO_PIN_1
#define LD1_GPIO_Port GPIOG
#define LD_RED_Pin GPIO_PIN_11
#define LD_RED_GPIO_Port GPIOE
#define LD_GREEN_Pin GPIO_PIN_14
#define LD_GREEN_GPIO_Port GPIOF
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2020 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "string.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart7;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_UART7_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
char readBuf[1];
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_UART7_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart7,(uint8_t*)readBuf,1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle){
switch(readBuf[0]){
case 'r':
HAL_GPIO_TogglePin(LD_RED_GPIO_Port,LD_RED_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED_RED!\r\n",strlen("LED_RED!\r\n"),HAL_MAX_DELAY);
break;
case 'g':
HAL_GPIO_TogglePin(LD_GREEN_GPIO_Port,LD_GREEN_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED_GREEN!\r\n",strlen("LED_GREEN!\r\n"),HAL_MAX_DELAY);
break;
case '1':
HAL_GPIO_TogglePin(LD1_GPIO_Port,LD1_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED1!\r\n",strlen("LED1!\r\n"),HAL_MAX_DELAY);
break;
case '2':
HAL_GPIO_TogglePin(LD2_GPIO_Port,LD2_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED2!\r\n",strlen("LED2!\r\n"),HAL_MAX_DELAY);
break;
case '3':
HAL_GPIO_TogglePin(LD3_GPIO_Port,LD3_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED3!\r\n",strlen("LED3!\r\n"),HAL_MAX_DELAY);
break;
case '4':
HAL_GPIO_TogglePin(LD4_GPIO_Port,LD4_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED4!\r\n",strlen("LED4!\r\n"),HAL_MAX_DELAY);
break;
case '5':
HAL_GPIO_TogglePin(LD5_GPIO_Port,LD5_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED5!\r\n",strlen("LED5!\r\n"),HAL_MAX_DELAY);
break;
case '6':
HAL_GPIO_TogglePin(LD6_GPIO_Port,LD6_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED6!\r\n",strlen("LED6!\r\n"),HAL_MAX_DELAY);
break;
case '7':
HAL_GPIO_TogglePin(LD7_GPIO_Port,LD7_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED7!\r\n",strlen("LED7!\r\n"),HAL_MAX_DELAY);
break;
case '8':
HAL_GPIO_TogglePin(LD8_GPIO_Port,LD8_Pin);
HAL_UART_Transmit(&huart7,(uint8_t*)"LED8!\r\n",strlen("LED8!\r\n"),HAL_MAX_DELAY);
break;
}
HAL_UART_Receive_IT(&huart7,(uint8_t*)readBuf,1);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief UART7 Initialization Function
* @param None
* @retval None
*/
static void MX_UART7_Init(void)
{
/* USER CODE BEGIN UART7_Init 0 */
/* USER CODE END UART7_Init 0 */
/* USER CODE BEGIN UART7_Init 1 */
/* USER CODE END UART7_Init 1 */
huart7.Instance = UART7;
huart7.Init.BaudRate = 115200;
huart7.Init.WordLength = UART_WORDLENGTH_8B;
huart7.Init.StopBits = UART_STOPBITS_1;
huart7.Init.Parity = UART_PARITY_NONE;
huart7.Init.Mode = UART_MODE_TX_RX;
huart7.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart7.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart7) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN UART7_Init 2 */
/* USER CODE END UART7_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOG_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOG, LD8_Pin|LD7_Pin|LD6_Pin|LD5_Pin
|LD4_Pin|LD3_Pin|LD2_Pin|LD1_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD_RED_GPIO_Port, LD_RED_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD_GREEN_GPIO_Port, LD_GREEN_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : LD8_Pin LD7_Pin LD6_Pin LD5_Pin
LD4_Pin LD3_Pin LD2_Pin LD1_Pin */
GPIO_InitStruct.Pin = LD8_Pin|LD7_Pin|LD6_Pin|LD5_Pin
|LD4_Pin|LD3_Pin|LD2_Pin|LD1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
/*Configure GPIO pin : LD_RED_Pin */
GPIO_InitStruct.Pin = LD_RED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD_RED_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD_GREEN_Pin */
GPIO_InitStruct.Pin = LD_GREEN_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD_GREEN_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
5.4 效果展示

 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶













