|
6605| 5
|
[入门教程] 【掌控未来智造营】基于掌控板的机械能守恒实验 |
##掌控板科学实验系列课程##  课程二:机械能守恒验证实验 本教具适用于高中必修二第八章《机械能守恒定律》中第2节《重力势能》,第3节《动能和动能定理》,第4节《机械能守恒定律》,第5节《实验:验证机械能守恒定律》的内容教学,用于研究自由下落物体的重力势能,动能,以及机械能守恒定律 一、知识背景重力势能 当物体的高度发生变化时,重力做功,势能发生变化;物体下降时重力做正功,势能减小;物体被举高时重力做负功,势能增大。因此,重力势能与重力做功密切相关,认识重力势能不应脱离对重力做功的研究。 物体运动时,重力对它做的功只跟它的起点和终点的位置有关,而跟物体的运动路径无关,物体所受的重力mg与它所处的位置高度h的乘积mgh具有特殊意义,mgh的特殊意义在于它一方面与重力做的功密切相关,另一方面它随着高度的增加而增加,随着质量的增加而增加,因此我们把mgh叫做物体的重力势能,常用Ep表示,即Ep=mgh,单位与功的单位相同,都是焦耳,符号为J, 1J=1kg·m·s﹣²·m=1N·m 重力做的功和重力势能的关系可以写为 WG=Ep1-Ep2,其中Ep1表示物体在初位置的重力势能,Ep2表示物体在末位置的重力势能 动能 Ek=1/2mv² 它的单位是焦耳,1kg(m/s)²=1N·m=1J 在得到动能表达式后,1/2mv2²-1/2mv1²可以写成W=Ek2-Ek1,其中Ek2表示这个过程的末动能,Ek1表示这个过程的初动能 动能与势能的转化如图1物体竖直自由下落时,重力对物体做正功,物体的重力势能减少,减少的重力势能到哪里去了呢? 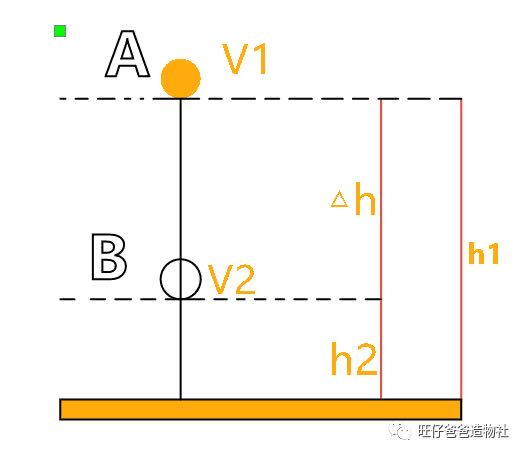 图1 我们发现在这个过程中,物体的速度增加了,表示物体的动能增加了。这说明,物体原来的重力势能转化成了动能。 竖直向上抛出一个物体,随着物体高度的增加,它的速度会减小,表示物体的动能减少了,但由于物体的高度增加,它的重力势能增加了,这说明,物体的动能转化成了重力势能 重力势能、弹性势能与动能都是机械运动中的能量形式,统称为机械能,通过重力或弹力做功,机械能可以从一种形式转化成另一种形式 动能与势能的相互转化是否存在某种定量关系呢?在图1中,物体在某一时刻处在高度h1的位置A,这时它的速度为v1,经过一段时间后,物体下落到高度h2的另一位置B,这时它的速度是v2。用W表示这一过程中重力做的功。从动能定理知道,重力对物体做的功等于物体动能的增加,即,W=1/2mv2²-1/2mv1²,另一方面,重力对物体做的功等于物体重力势能的减小,即 W=mgh1-mgh2 从以上两个公式可以得出 mgh1-mgh2=1/2mv2²-1/2mv1² 也就是说重力做了多少功,就有多少重力势能转化为动能,当位置h1的速度v1为0时,等式还可以写成mg△h=1/2mv2²,根据这个等式我们就可以来验证本次的实验 二、实验方案确定在高中物理课本中验证机械能守恒定律是利用打点计时器来进行的测量的,如图2,教具方案的选型迭代过程可以在文末看详细的附录,正文不再赘述(不过个人觉得方案的迭代过程对能力提升更有帮助) 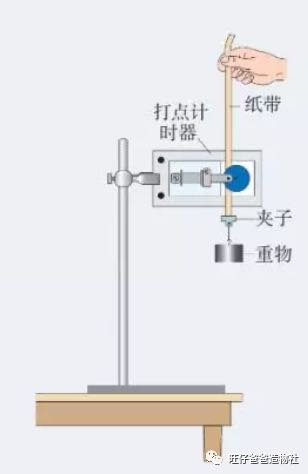 图2 打点计时器使用中纸带的摩擦力和手移动的速度会对实验数据产生影响,基于上述原因,本次实验我们利用一种数字化的测量教具完成实验,以下是教具的简介,教具展示如图3所示 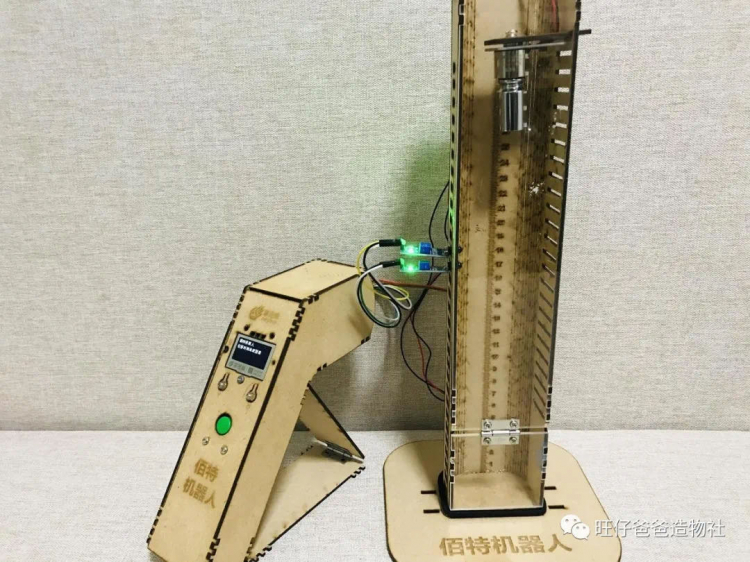 图2 三、教具使用简介 1、教具的特色 a.远程脱机数据采集,减少实验误差; b.实时保存,回传实验数据,保证了数据的准确性; c.可单一变量进行对比分析; d.可以进行多个实验探究; 2、教具的制作方法 a.制作教具所需材料 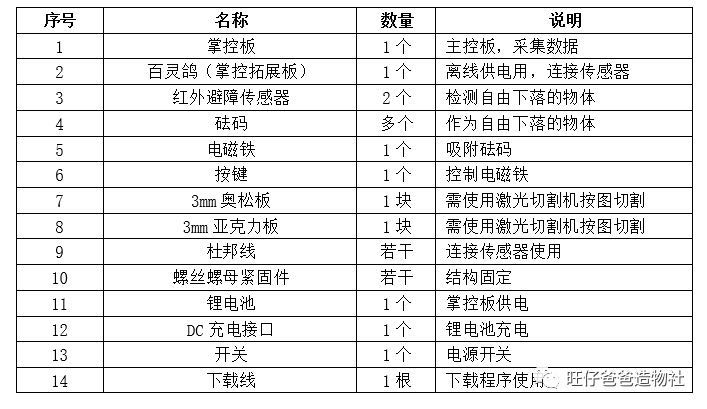 b.设计接线组装 1)利用cad设计图纸,采用激光切割加工3mm奥松板,设计亮点在于突出了掌控板的声音,光线,触摸【Y】【O】引脚以及RGB灯,尤其是两个触摸引脚,在外壳上就可以直接使用,图纸与实物如图4,图5,图6,图7所示 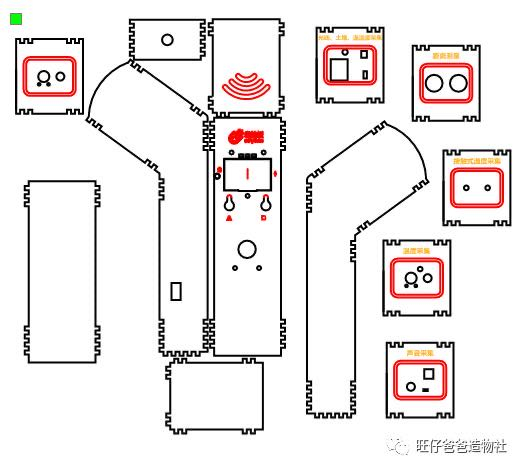 图4 掌控板主控端结构设计图 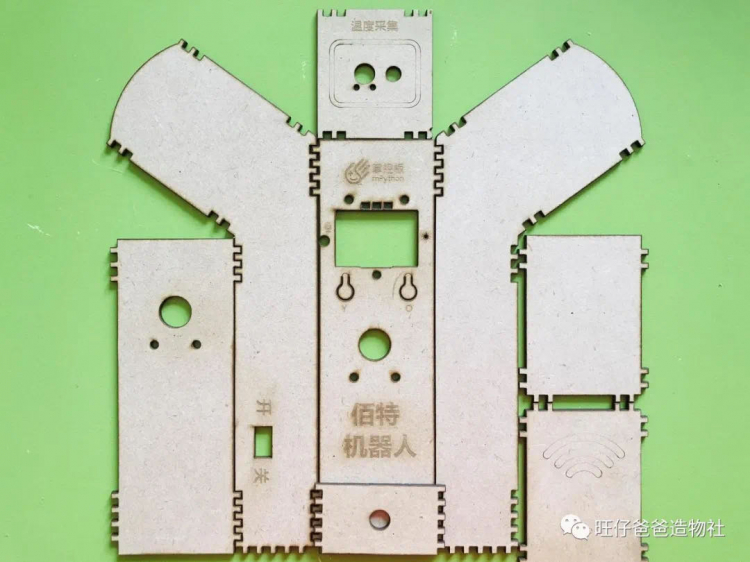 图5 掌控板主控端结构实物图  图6实验装置设计图 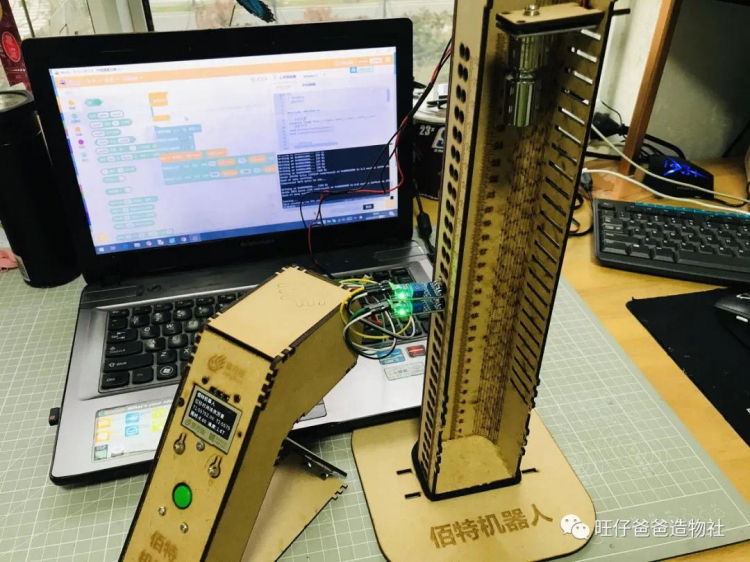 图7实验装置实物图 2)线路连接 如图8,图9 为传感器接线图以及电源接线图,两个红外避障传感器用来检测移动的物体,电磁铁吸附砝码,按键用来控制电磁铁通断电 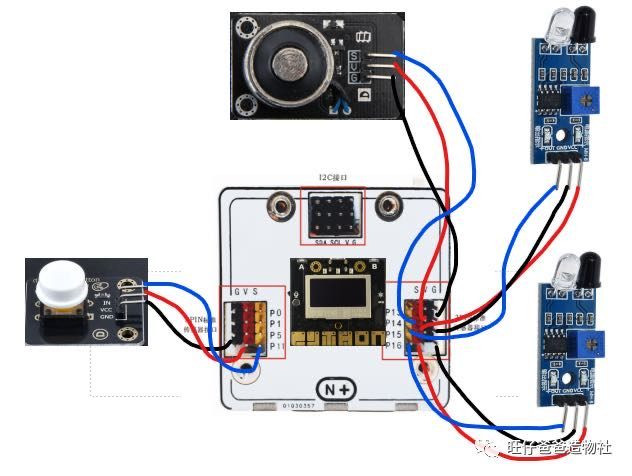 图8传感器线路图 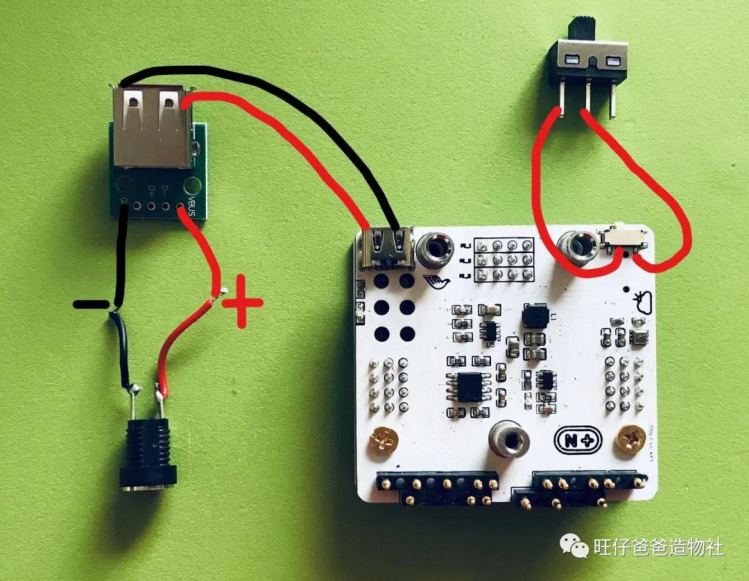 图9 开关充电电路 3)零件组装 为了方便采集科学实验数据,特地设计了可折叠式的支架结构,如图10所示  图10 组合后主控装置 如图11为实验装置完整作品图 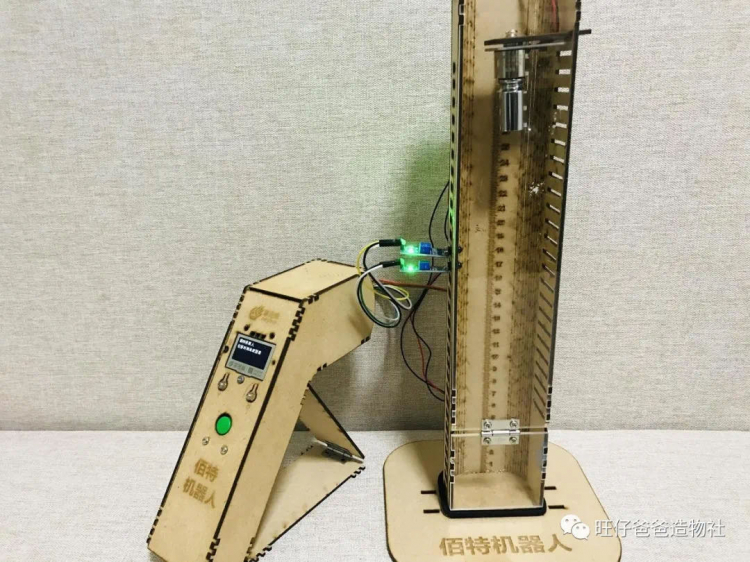 图11 组合后完整实验装置 如图12,图13,图14,图15为实验装置细节图 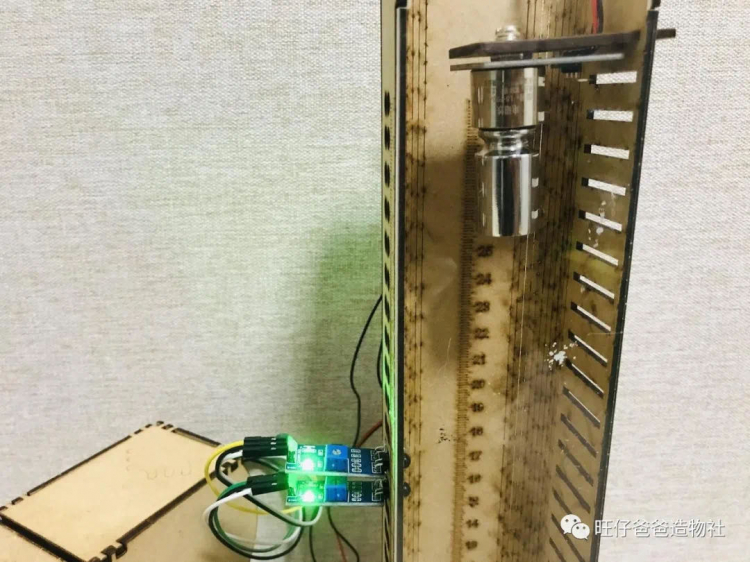 图12 实验装置电磁铁及砝码  图13 实验装置红外传感器安装孔位  图14 实验装置电磁铁安装孔位 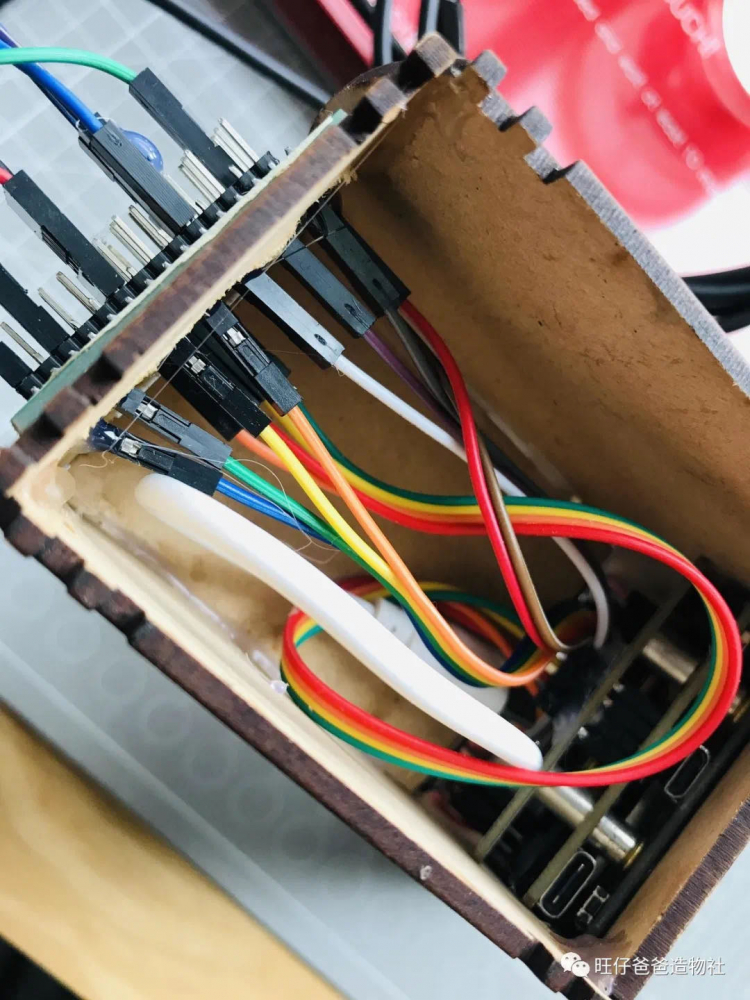 图15 io引脚转接细节图 3、原理分析与程序源代码 (1) 数据采集原理分析 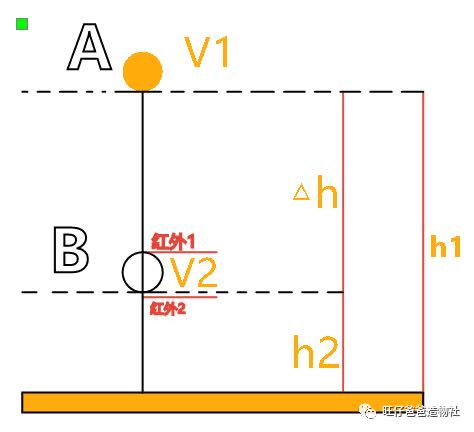 图16 通过知识背景中的简述,当初速度v1为0时,我们推理得到公式 mg△h=1/2mv2²,公式中v2末速度是未知量,需要通过实验求得,如图16,假设v2为B点的瞬时速度,如果能将B点的瞬时速度求出,带入公式就可以验证机械能守恒定律,要求B的瞬时速度可以在B点的上下位置安装两颗红外避障传感器,如果两颗红外避障传感器距离足够近,此时两个传感器间的平均速度就可以近似理解为B点的瞬时速度,平均速度可以通过位移和时间计算求得,求解公式为v=△X/△t 掌握了实验原理,接下来我们来了解具体测量的实验过程 两个红外避障传感器接掌控板p15和p16引脚,电磁铁安装在实验装置的最高处,按键接p7引脚控制电磁铁释放砝码,电磁铁接p14引脚,当第一个红外避障传感器检测到砝码经过时信号会由1变为0,记录下当前的系统时间time1,当第二个红外避障传感器检测到砝码经过时,记录下系统时间time2,第二次的的时间减去第一次的时间也就是time2-time1,就是我们要求得的△t,位移△X可以由教具上的刻度知晓,如下图17所示两颗红外避障传感器的间距为1cm,也就是△X=1cm 图17 实验装置刻度显示 (2) 程序源代码 如图18为掌控板联网和红外传感器检测砝码的程序,程序用【mpython】编写,红外传感器使用中环境光线可能会对其产生干扰,可以通过调节旋钮来调节红外传感器的灵敏度,也可以用遮挡的方式遮住红外传感器周围的光线 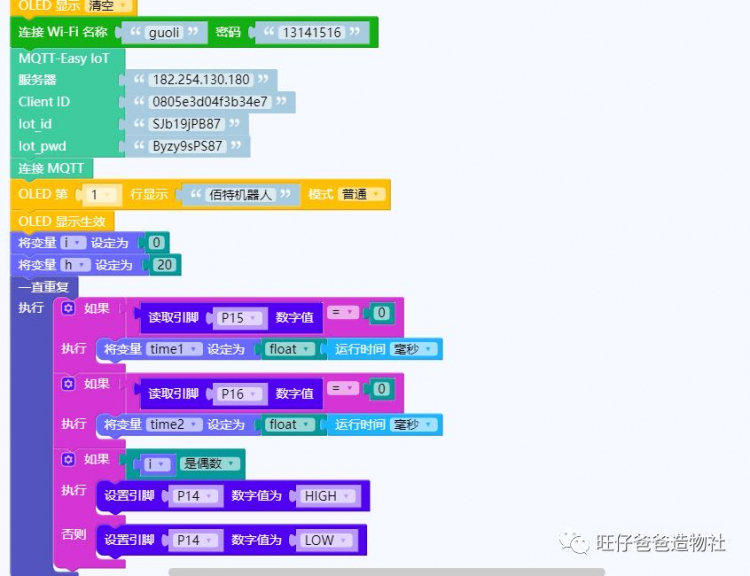 图18 掌控板联网和检测程序 如图19触摸键【Y】可以调节程序中砝码释放高度h,可调节的高度分别为20cm,15cm,10cm,和5cm 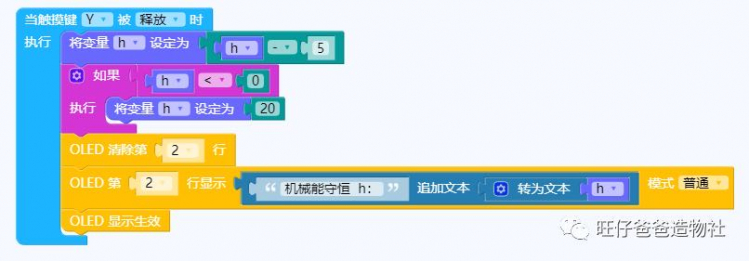 图19 高度调节程序 如图20为按键控制电磁铁的程序,当变量【i】的数值为偶数时电磁铁通电,为奇数时电磁铁断电 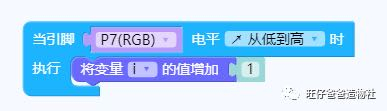 图20 按键控制电磁铁程序 如图21触摸【O】键可以显示砝码经过两个红外传感器的时间,通过公式v=△X/△t计算求得当前的瞬时速度,通过公式mg△h=1/2mv2²,计算下落过程中的重力势能和动能,并将用时,速度,重力势能和动能显示在屏幕中,同时发送至easy iot物联网平台 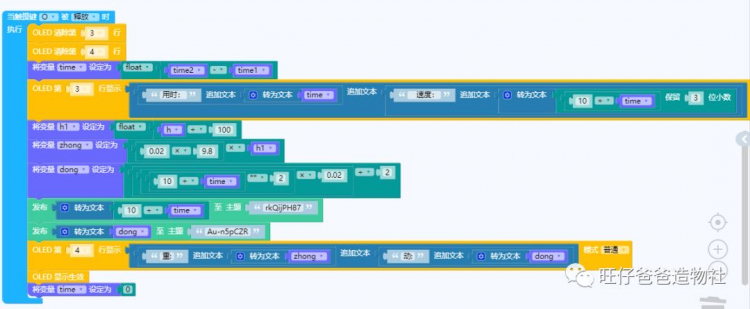 图21 数据计算显示及上传 四、实验展示教具使用方法课程导入 在生活中有这样一种场景,小朋友手上拿的苹果掉地上,基本上不会坏,洗洗还可以吃,但如果这个苹果是楼上掉到楼下,楼层很高的话,苹果上基本上就摔烂了,同样是苹果,高度不同为什么最后的结果不一样呢? 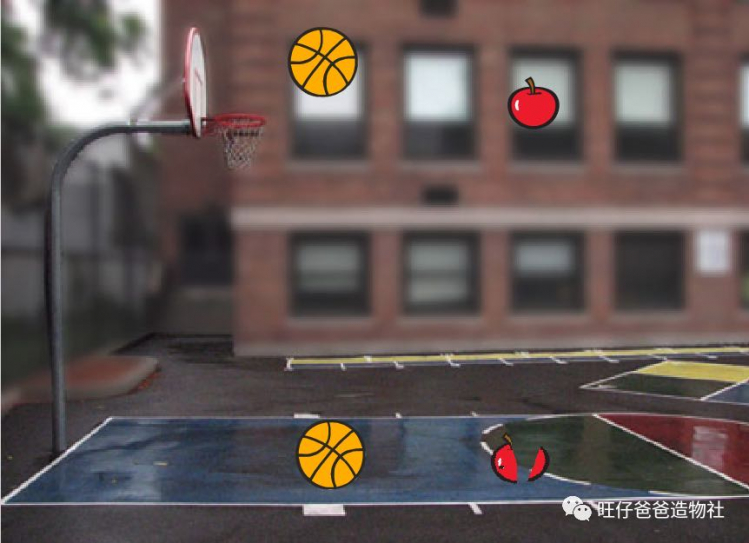 图22 如图22,还是上面的场景,我们把手中的苹果换成篮球,从不同的高度将篮球扔下,篮球落地后回弹弹高度会不同,扔下时的高度越高,回弹的高度就越高,造成这个现象的原因是什么呢他们中间存在着什么样的能量转换呢? 其实,上述两个场景就涉及到了重力势能,动能和机械能守恒的知识,让我们一起来用掌控板探究一下 实验活动1:探究同一物体不同的高度重力势能和动能的转换 实验准备: 如下图23,图24所示,需要准备器材20g砝码,按键,电磁铁,使用3mm奥松板制作的测量装置 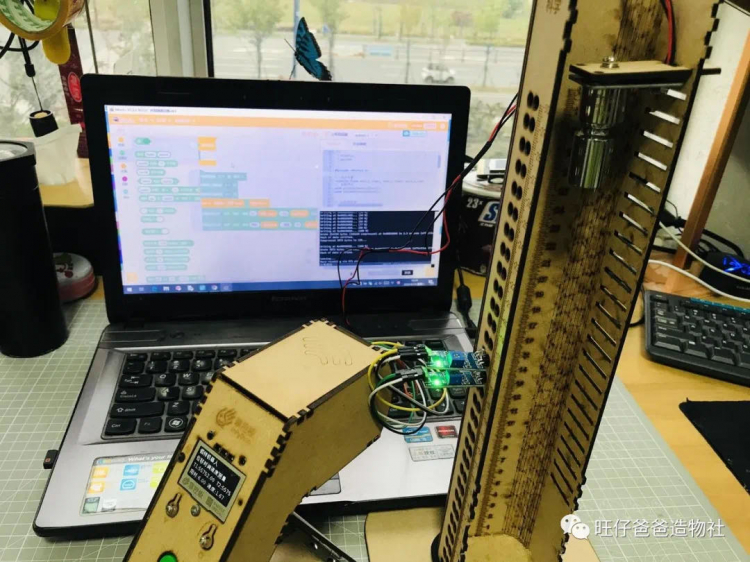 图23  图24 实验步骤: 通过掌控板连接的红外避障传感器,按键与电磁铁,当红外避障传感器检测到下落的砝码时记录此时的系统时间,两个红外避障传感器间的距离足够接近,此时的平均速度为瞬时速度,通过v=△X/△t计算求得砝码经过两个红外避障传感器时的瞬时速度,将瞬时速度带入公式mgh1-mgh2=1/2mv2²-1/2mv1²,初速度v1为0时mg△h=1/2mv²,验证机械能是否守恒 1)掌控板上传程序,掌控板连接红外传感器,按键以及电磁铁 2)电磁铁安装在最高处,电磁铁通电吸附20g砝码,按键按下电磁铁断电释放砝码,记录此时砝码经过红外避障传感器时的瞬时速度 3)逐步将释放降低高度,并读取记录的速度数据,通过公式验证机械能是否守恒 4)将数据绘制成图表或发送至物联网平台 实验演示视频 实验结论:  如图25,图26所示,为20g砝码从高度为20cm,15cm,10cm,5cm自由落体到达红外传感器时的瞬时速度 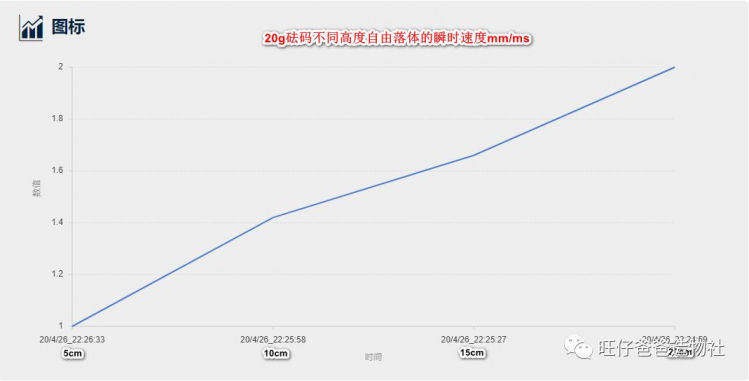 图25 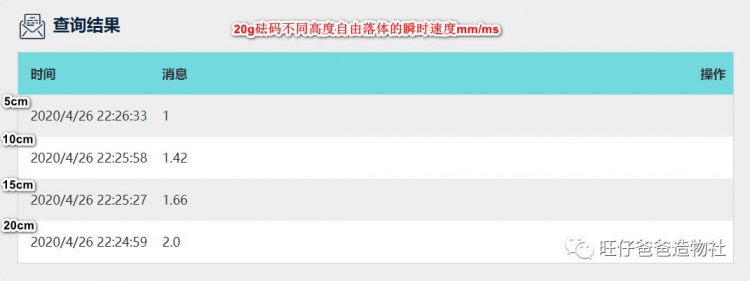 图26 如图27,图28为知道瞬时速度,通过公式1/2mv²求得的动能 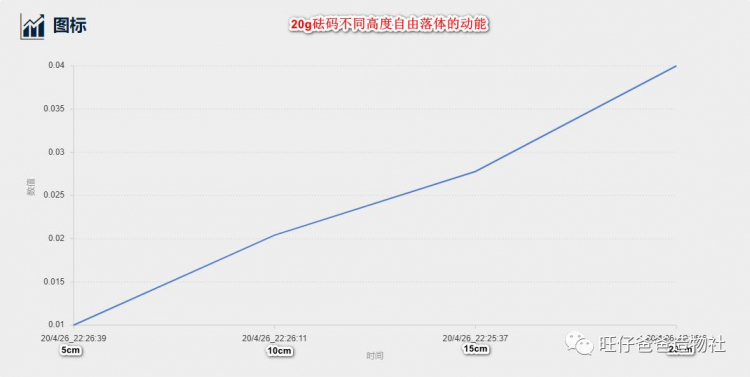 图27 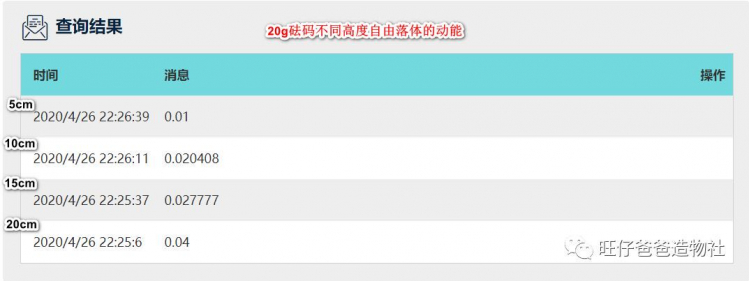 图28 如图29为四次测量结果在掌控板OLED屏幕上的显示数据,将每次测量到的数据进行比较,动能和重力势能还是非常接近的,重力势能计算mgh,m=0.02Kg,g=9.8kg/N  图29 由此可以得出结论: 物体越高,所受重力势能越________________转换成动能越__________ 课堂讨论:如图30打夯机的工作时,高度越高,砸向地面的力量就越大,松散的地面就会夯实 课堂讲解:打夯机被抬到高度越高,重力势能就越大,落向地面时重力势能转化为的动能就越大,所以松散的地面可以夯实,也解释了苹果为什么从高处落下会摔烂,篮球会弹的很高。 重力势能、弹性势能与动能都是机械运动中的能量形式,统称为机械能,通过重力或弹力做功,机械能可以从一种形式转化成另一种形式  图30 实验中需要注意到问题: 物体下落过程中,除了重力外会受到哪些阻力?怎么样减少这些阻力对实验的影响? 实验活动2:改变物体重量探究相同高度下落重力势能和动能的转换 程序更改: 由于实验2换做不同重量的砝码,所以每次都重量需要改动后再进行实验,如下图31为20g砝码时的程序 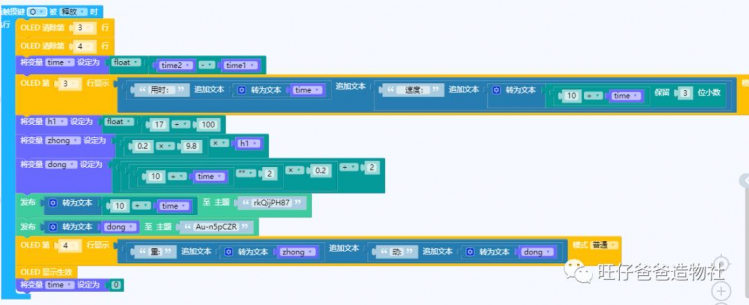 图31 实验准备:如下图32,图33所示,需要准备器材200g,100g,50g,20g,10g砝码,按键,电磁铁,使用3mm奥松板制作的测量装置  图32 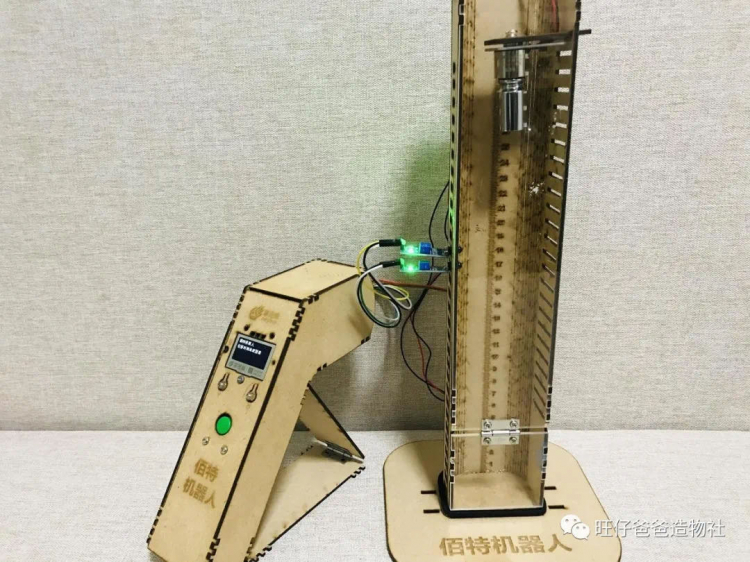 图33 实验步骤: 通过掌控板连接的红外避障传感器,按键以及电磁铁,按键按下电磁铁释放砝码,当红外避障传感器检测到下落的砝码时记录此时的系统时间,两个红外避障传感器间的距离足够接近,通过v=△X/△t计算求得砝码经过两个红外避障传感器时的瞬时速度,将瞬时速度带入公式mgh1-mgh2=1/2mv2²-1/2mv1²,初速度v1为0时mg△h=1/2mv²,验证机械能是否守恒,然后更换不同重量的砝码重复上述步骤 1)掌控板上传程序,掌控板连接红外传感器,按键以及电磁铁 2)电磁铁安装在最高处,电磁铁通电吸附最大的200g砝码,按键按下电磁铁断电释放砝码,记录此时砝码经过红外避障传感器时的瞬时速度 3)逐步将换用小一点的砝码,依次为100g,50g,20g,10g,并读取记录的速度数据,通过公式验证机械能是否守恒 4)将数据绘制成图表或将数据发送物联网平台 实验演示视频 实验结论:  如图34,图35所示,为200g,100g,50g,20g,10g砝码从高度为17cm处自由落体到达红外传感器时的瞬时速度  图34  图35 如图36,图37为知道瞬时速度,通过公式1/2mv²求得的动能 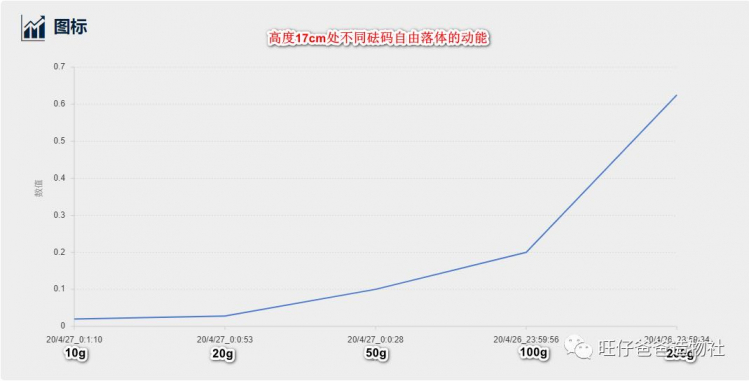 图36 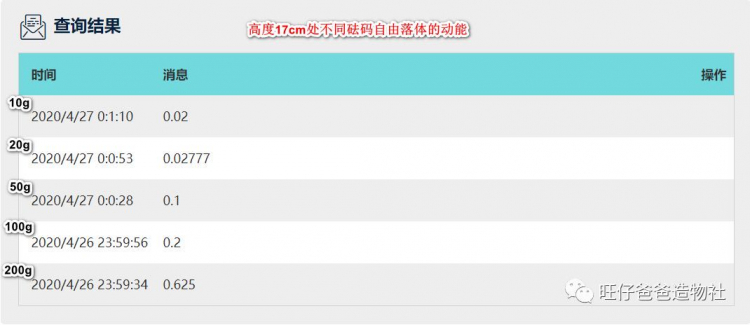 图37 如图38为五次测量结果在掌控板OLED屏幕上的显示数据,将每次测量到的数据进行比较,动能和重力势能有细小的不同,可以分析一下为什么实验2 的数据比实验1的数据误差要大一点,能的原因有红外传感器相应速度,高度设置的问题等,要知道实验误差也是实验组成的一部分,要学会查找原因,重力势能计算mgh,m=0.02Kg,g=9.8kg/N,  图38 当然也可以从数据中得出结论: 物体越重,所受重力势能越________________转换成动能越__________ 课堂讨论:如图39讨论麦克斯韦滚摆中重力势能和动能的转化过程 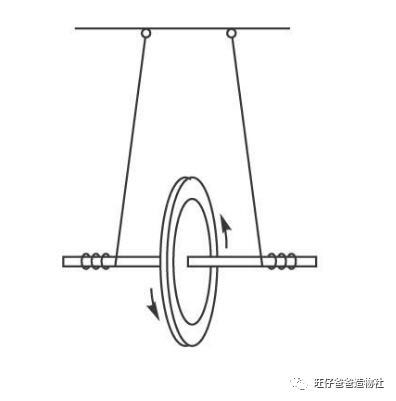 图39 课堂讲解:机械能守恒定律 麦克斯韦滚摆下降时,高度越低,重力势能越小,转动速度越大,转动动能越大;滚摆上升时,高度越高,重力势能越大,转动速度越小,转动动能越小 拓展活动:探究物体自由下落过程中的速度变化 增加红外传感器的数量,测量砝码在自由落体过程中的速度,如下图所示,拓展任务留给同学们去测试 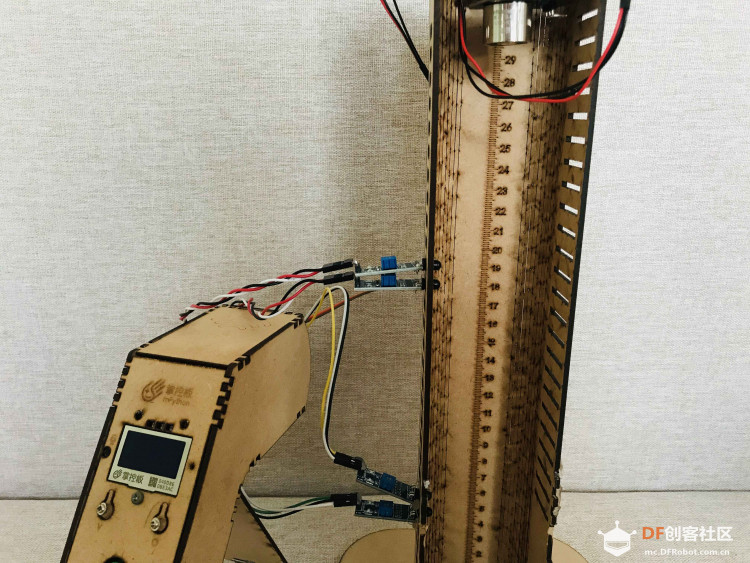 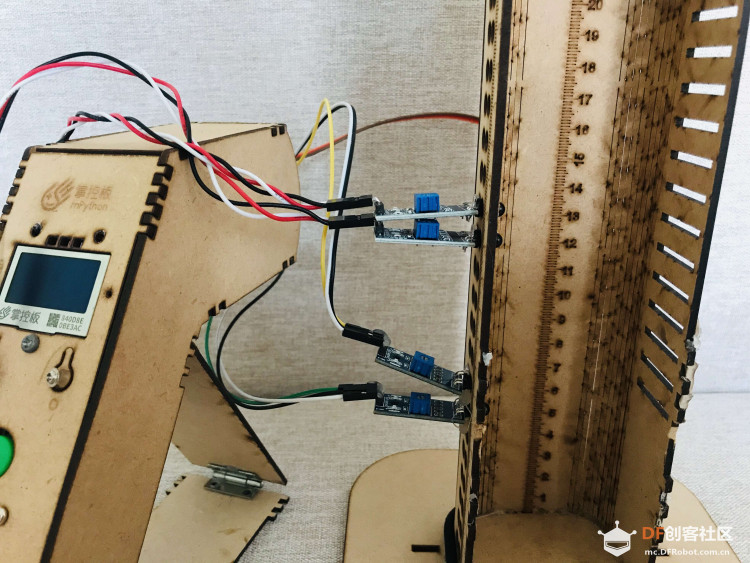  本次教学活动我们从两个生活中的场景出发,认识了重力势能,动能,机械能守恒定律。通过实验体会到了物体在下落过程中重力势能和动能的变化,最后通过物理定律的分析了解了机械能守恒定律。 本实验装置核心仅使用了掌控板,结构器材均采用激光切割的木板和亚克力材料,成本低,可操作性强,实验操作简单快捷,可使用与教室演示和学生自主探究,实验效果明显,有利于学生对本章节内容的学习和理解。 附录 #实验方案的迭代过程#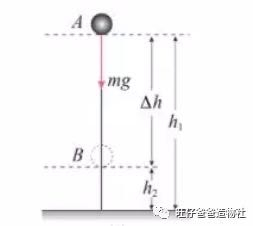 本次实验的关键点是如何获取某一点的瞬时速度,为了精确测量某一点的瞬时速度,想到多种方案 方案1:利用microbit作为自由落体的物体测量经过某点的加速度值,通过物联网平台回传数据,掌控板从物联网平台获取数据,知道加速度根据公式计算当前的瞬时速度,此方案经过测试,发现测量的数据不够精确,是由于数据回传的响应速度比较慢造成的,只好放弃 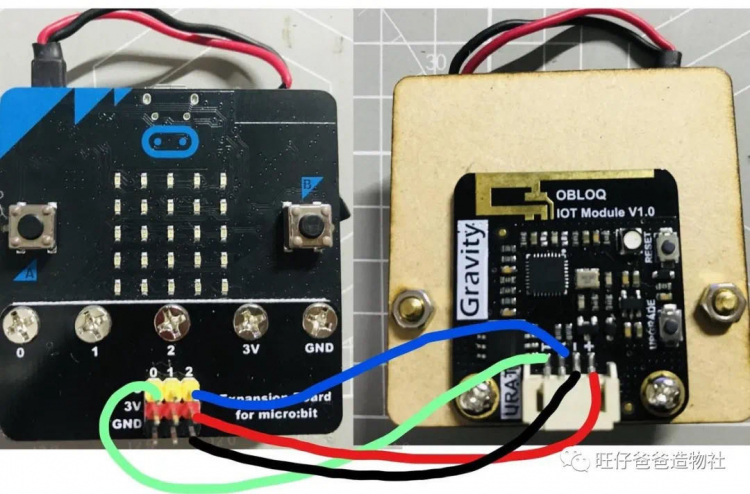 方案2:利用掌控板自由落体作为自由落体的物体,测量经过某点的加速度值,利用掌控板的无线通信方式,发送数据,经过测试,此方案的数据也不够准确,同样是因为响应速度慢造成的,只好放弃  图片没有拍摄保留,保留下来的有程序的截图  同时在利用掌控板测试时,发现如果掌控板启用了无线通信模式会与wifi功能冲突,经过询问大佬确实如此,要尽量避免两个功能同时使用 方案3,放弃用主控板测量加速度的方案,改用检测自由落体的瞬时速度,此时面临检测传感器的选型,想到了两种器材,第一种是红外避障传感器,通过检测下落的物体记录时间,第二种是采用红外对管来检测下落的物体   进行比较后最终采用了比较廉价的红外避障传感器 利用两颗红外传感器检测下落的物体,计算平均速度,当两颗红外传感器的距离足够接近时此时的平均速度近似于瞬时速度,经过测试,数据基本可靠,与上述方案相比较更加节省成本 通过迭代方案的确认过程可以看出,实验数据的真实准确是实验方案确定的重要标准 #改进# 此次实验方案,还有待改进和优化的地方有三方面。 一 如何让记录的时间更加的准确,可以继续尝试改进方案 二 在实验过程中由于检测系统时间频率过快偶尔还会出现bug,需要再优化程序 三 本次实验最终选择了红外避障模块,红外对管的方案也可以进行尝试,对数据的可靠性进行比较  #总结# 经历了《机械能守恒》实验的方案迭代,设计实施,调整测试等等环节,个人认为,一个完整实验的实施过程也是多学科融合的过程,多学科的融合也是stem的核心内容,实验方案的可实施性固然重要,但这个实践改进的过程更加的宝贵,实验实施中的科学探索精神更加难得,希望通过科学实验教具的方案给孩子们带来的不仅是理论知识上的提高,更多的是运用stem的方法探索科学的综合能力提升 造物让生活更美好,让我们一起动手造起来吧 接下来还会有更多的科学实验课程,欢迎关注【旺仔爸爸造物社】,一起期待下一期见 联系请加旺仔爸爸 18752544995 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






