|
2654| 1
|
【临沂】侦查机器人 |
|
侦查机器人 大家好,机器人最后一课更新,相信做一名英姿飒爽的军人是很多男生心中的梦想,这节课我们就用红外遥控机器人制作一个侦察机器人。 本课所需要的器材有:树莓派主板,红外遥控扩展板,红外遥控机器人,充电宝,手机将器材按图中所示搭建好。我用的扎带,如果大家有更好的方法欢迎推荐,另外要说明的是我的充电宝太大太沉了,不太好用,后面沉,不稳,如果用比较小巧些的充电宝建议用小一点的。  打开APP INVENTOR的编程网站https://app.wxbit.com/login/,登录账号,一般用QQ号登录即可。单击“新建项目”,项目名称命名为“zhencha”,在这里要注意项目名称不支持中文。新建项目之后,在右侧的组件属性中将标题改为“侦查机器人”,水平对齐和垂直对齐方式改为“居中”。  在“用户界面”中把“按钮”拖入工作面板中,在右侧的组件属性中修改文本为“前进”,字号“16”,背景颜色为黄色。  选择“组件列表”中的“按钮1”选择“重命名”将按钮1重命名为前进。  再拖入四个按钮,分别命名为“后退”“左转”“右转”“拍照”,与按钮1做同样的修改。  将“通信连接”中的“MQTT客户端”拖入工作面板,由于这个是不可见控件,所以会在屏幕的下方。  切换到“逻辑设计”界面,单击“sceen1”,将screen1初始化积木拖入工作面板,然后将MQTT客户端中的调用MQTT客户端连接积木嵌入到screen初始化积木中。使程序开始运行就调用MQTT客户端连接  将“前进”中的当“前进”被点击运行积木拖入工作面板,设置“前进”文本颜色为红色,调用MQTT客户端发布主题“malili1/zl”z主题是接收主题的树莓派的账号加接收的主题名称。消息为“GO”,注意这里需要用大写,是否保留消息为假,可靠级别为零。 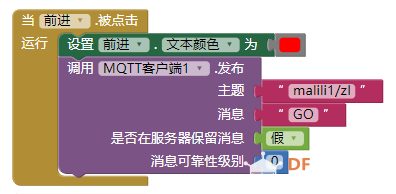 同样设置“后退”的积木,把消息改为“BACK”,左转积木,消息改为“LEFT”右转积木,消息改为“RIGHT”拍照的积木,把消息改为“PIC” 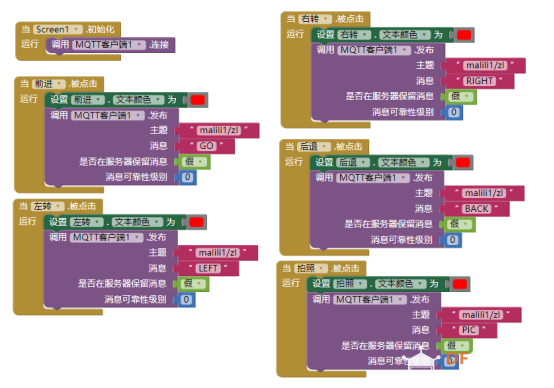 程序编写好了,单击上方的“生成APK”显示二维码  用手机扫描二维码,选择下载,然后安装到手机上。 回到组件设计,选择MQTT客户端,复制组件属性中服务器的URL  打开古德微机器人的编程网站http://www.gdwrobot.com/,连接设备,选择物联网中的设置物联网服务器,粘贴复制到服务器地址,其他不变  监听主题“zl”重复执行并判断,如果物联网收到新的数据,新建变量“指令内容”复制变量指令内容为获取主题zl的数据,然后再进行判断,如果指令内容等于“GO”控制机器人前进1秒,如果指令内容等于“BACK”控制机器人后退1秒,如果指令内容等于“LEFT”控制机器人左转1秒,如果指令内容等于“RIGHT”控制机器人右转1秒,如果指令内容等于“pic”,创建索引“index007”新建变量”拍照赋值拍照为拍一张照片,并将图片拍照信息按照索引index007保存,否则控制机器人停止。 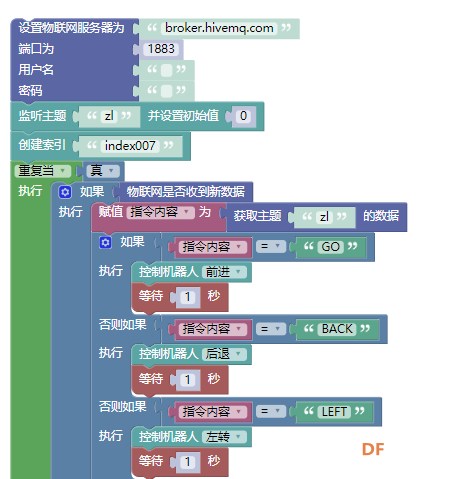 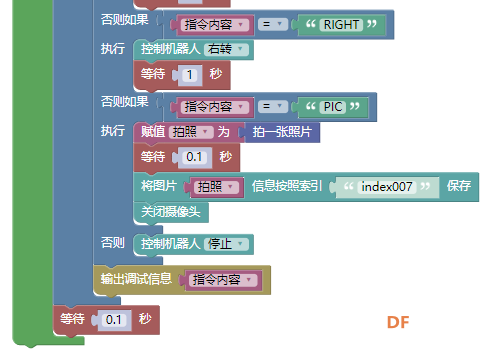 我们的侦查机器人拍到的照片可以通过远程登录,在home/pi/imagetemp文件夹下,我们可以看到机器人给我们传回的照片。 关于机器人还什么好玩的用法,需要大家一起探索,欢迎分享。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






