|
10979| 9
|
[项目] #掌控板盘古斧——机甲玩者格斗机器人 |
|
本帖最后由 Jensen罗正晓 于 2020-6-1 14:22 编辑 #掌控板盘古斧——机甲玩者格斗机器人 丨智造社出品 (曾力华 罗正晓)  Part1#格斗机器人 随着科技的发展机器人越来越普及,在机器人比赛中,最受欢迎的是机器人格斗比赛。机器人之间要是展开一场“火拼”的话,观赏精彩程度和紧张激烈氛围丝毫不亚于人类的体育竞赛。 国外的机器人赛事还是比较热门,比赛的科技含量和激烈程度逐年增加。国内小型百格斗机器人市场现在已经初具规模,虽然也引进了几档大型机器人的格斗竞技电视节目,如《铁甲雄心》《这就是铁甲》都颇受欢迎,侠客的自信是我最为喜欢的,两顿烧烤的实力也有一定的国际水平,玄学大师青玛瑙那就一个锦鲤附体。但是大型的机器人竞技还在摸索期,像美度国日本机甲对战那种巨型机器人比赛,想把专他打造成赛事还需要时间。 机器人种类: 1. 横向旋转型机器人 横型旋转类型的机器人的有点和缺点。优点其实很突出,就是攻击力超强,另外一个优点是武器攻击半径较大,加上两个轮子的灵活性,它几乎不用担心自己的防守。 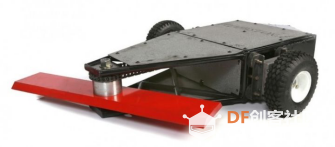 图1.1 2. 竖直旋转型机器人 有着比电锯型机器人更大直径的少齿转盘或旋转杆,在竖直方向上旋转,通过武器直接击中对手,或是将对手弹到空中然后砸到地面。  图1.2 3. 冲撞型机器人 这类机器人通常有4个或以上的大轮子,牵引力大,护甲厚实,能抵抗冲击,他们没有主动攻击武器,通过机器前面巨大的护盾冲撞对手来产生伤害,至少能推动两倍自身重量 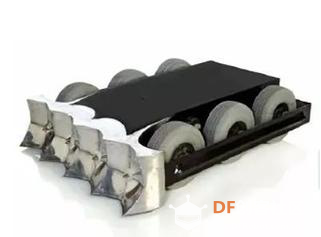 图1.3 4. 倾斜型机器人 通常有2到4个轮子,驾驶系统很扎实,与冲撞型机器人攻击方式类似,通过撞击让机器前面的楔形铲直入对手下方,使其失去行动力或者高速装翻对手  图1.4 5. 弹射型机器人 同样是机器人前面通常装配大型的机械臂,不过它通过大直径的气缸驱动,瞬间发力抛起对手,使对手腾空,然后砸向地面造成伤害,对那些底盘脆弱的机器人有很好的打击效果。 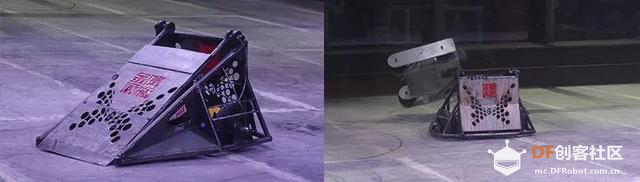 图1.5 6. 其他类型 还有一些其他类型的就不一一列举了,如液压咬合、高速自转等。  图1.6 本文章介绍的是基于掌控板盘古斧的竖转类简易“机甲玩者”格斗机器人——“三太子”,纯属娱乐,敬请笑纳。 Part2#建模出图 使用三维软件进行建模模拟装配(如图2.1),目的是为了减少在零件设计过程中因考虑不周全而导致多次的图纸修改。 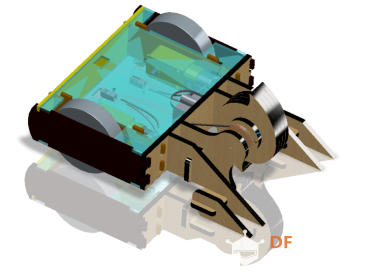 图2.1 作者使用的软件为ProE建模软件。  图2.2 当然,中小学或入门者推荐使用3Done、123Ddesign或Fusion360(如图2.3),因为这些软件在建模会较为直观,方便入门者的直观感受。  图2.3 零件建模完成后,导出二维工程图(格式DWG),并进行排版(如图2.4),排版的目的是为了在有限的空间内尽可能少地使用耗材,要无时无刻地惦记着环保。  图2.4 中小学生及入门者也可以使用LaserMaker(如图2.5)来进行设计、排版与切割创造,同样也是因为软件的使用较为方便简单。 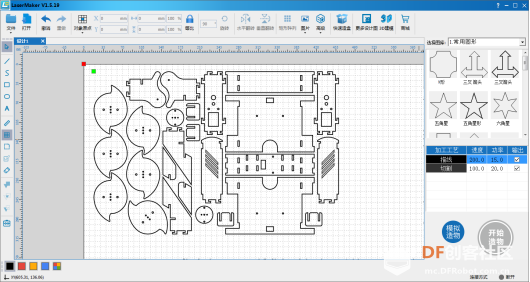 图2.5 我们这里使用的结构装配方式为榫卯结构,简单地“安利”一下榫卯结构: 榫卯是在两个木构件上所采用的一种凹凸结合的连接方式。凸出部分叫榫(或榫头);凹进部分叫卯(或榫眼、榫槽),榫和卯咬合,起到连接作用。这是中国古代建筑、家具及其它木制器械的主要结构方式。最基本的榫卯结构由两个构件组成,其中一个的榫头插入另一个的卯眼中,使两个构件连接并固定(如图2.6)。 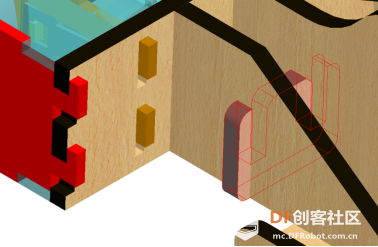 图2.6 Part3#零件清单 材料清单(表3.1):
Part4#结构组装 移动组的结构组装: 马达与轮子的安装(图4.1): 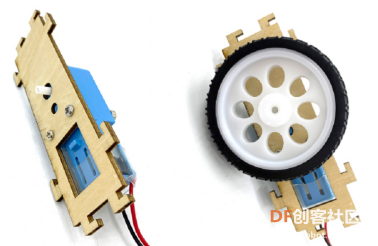 图4.1 底盘安装(图4.2): 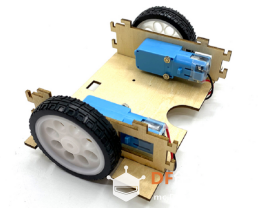  图4.2 侧板安装(图4.3):   图4.3 武器组的机构组装(图4.4): 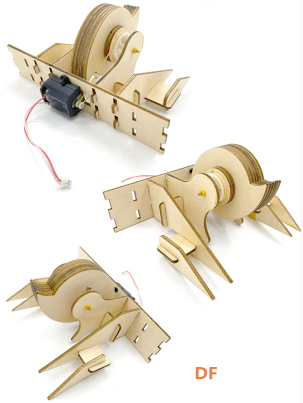 图4.4 底盘组与武器组的结构组装(图4.5):  图4.5 主控的结构组装(图4.6): 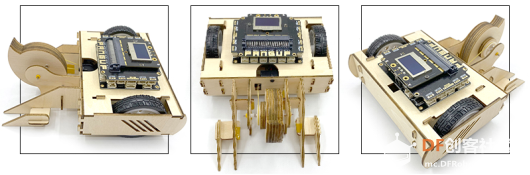 图4.6 成品效果图(图4.7): 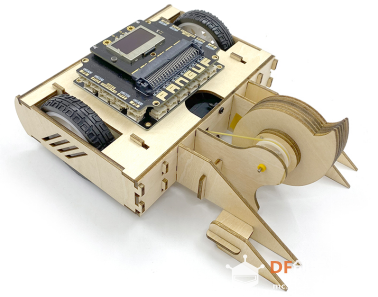 图4.7 Part5#电路连接与程序编写 电路连接: 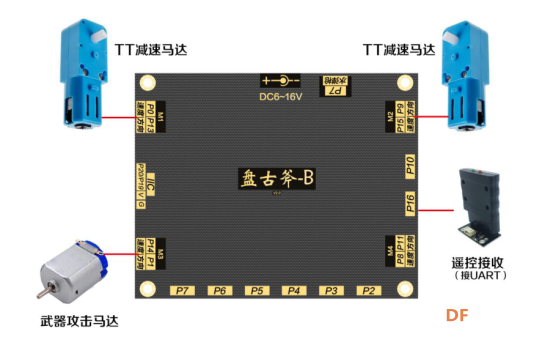 图5.1 程序编写参考:  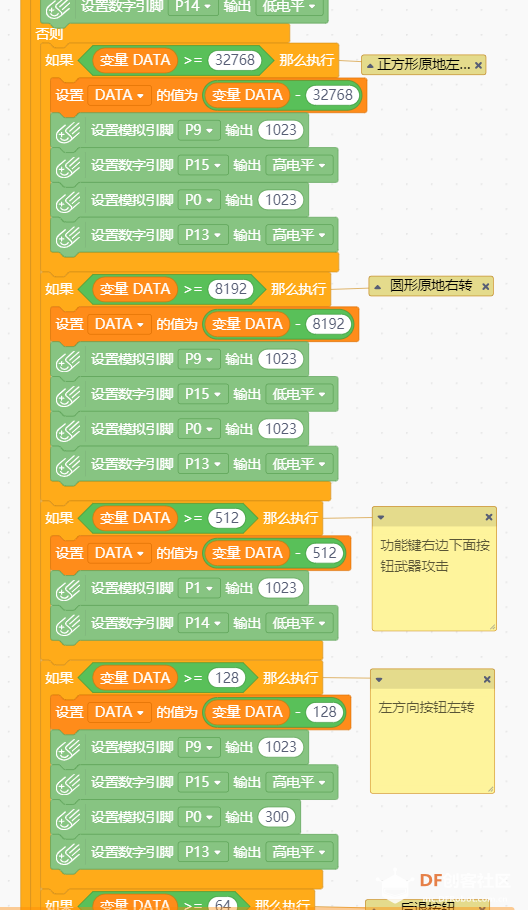   Part6#总结 在创作的过程中,会遇到很多细节的问题,特别是结构设计,如榫卯结构的过盈配合参数是多少,与所使用的激光切割的设备有关,需要在实际切割完后,进行测量计算,并调整好最后能够稳固装配的参数。在思考找错调整的过程,本身就是一个学习的过程。 本案例分享的只是格斗机器人的竖转型机器人,其他类型的简易板格斗机器人的设计,我们也正在探索当中。  写在最后 使用“机甲玩者”这IP,我们的目的想让更多的人参与到机甲文化当中来,当然,也是我们自己喜欢玩机甲。 我们前一个作品——掌控机甲狄仁杰也是属于众多“机甲”类型的一种,但是因为成本原因,并不是一个受众广泛的作品,但是我们持续在探索当中,希望能让更多的“玩者”们参考到机甲文化当中来,在“玩”的过程中学习。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶