|
7303| 1
|
[教程] 树莓派/PC摄像头数据共享(方法一:Python-OpenCV) |
|
使用Python和OpenCV实现树莓派/PC实时摄像头数据共享,主要分为服务器和客户端两部分。 服务器Demo如下: [mw_shl_code=python,false]#服务器端import socket import threading import struct import time import cv2 import numpy class Carame_Accept_Object: def __init__(self,S_addr_port=("",8880)): self.resolution=(640,480) #分辨率 self.img_fps=15 #每秒传输多少帧数 self.addr_port=S_addr_port self.Set_Socket(self.addr_port) #设置套接字 def Set_Socket(self,S_addr_port): self.server=socket.socket(socket.AF_INET,socket.SOCK_STREAM) self.server.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) #端口可复用 self.server.bind(S_addr_port) self.server.listen(5) #print("the process work in the port:%d" % S_addr_port[1]) def check_option(object,client): #按格式解码,确定帧数和分辨率 info=struct.unpack('lhh',client.recv(8)) if info[0]>888: object.img_fps=int(info[0])-888 #获取帧数 object.resolution=list(object.resolution) # 获取分辨率 object.resolution[0]=info[1] object.resolution[1]=info[2] object.resolution = tuple(object.resolution) return 1 else: return 0 def RT_Image(object,client,D_addr): if(check_option(object,client)==0): return camera=cv2.VideoCapture(0) #从摄像头中获取视频 img_param=[int(cv2.IMWRITE_JPEG_QUALITY),object.img_fps] #设置传送图像格式、帧数 while(1): time.sleep(0.1) #推迟线程运行0.1s _,object.img=camera.read() #读取视频每一帧 object.img=cv2.resize(object.img,object.resolution) #按要求调整图像大小(resolution必须为元组) _,img_encode=cv2.imencode('.jpg',object.img,img_param) #按格式生成图片 img_code=numpy.array(img_encode) #转换成矩阵 object.img_data=img_code.tostring() #生成相应的字符串 try: #按照相应的格式进行打包发送图片 client.send(struct.pack("lhh",len(object.img_data),object.resolution[0],object.resolution[1])+object.img_data) except: camera.release() #释放资源 return if __name__ == '__main__': camera=Carame_Accept_Object() while(1): client,D_addr=camera.server.accept() clientThread=threading.Thread(None,target=RT_Image,args=(camera,client,D_addr,)) clientThread.start()[/mw_shl_code] 客户端Demo如下: [mw_shl_code=python,false]#客户端import socket import cv2 import threading import struct import numpy class Camera_Connect_Object: def __init__(self,D_addr_port=["",8880]): self.resolution=[640,480] self.addr_port=D_addr_port self.src=888+15 #双方确定传输帧数,(888)为校验值 self.interval=0 #图片播放时间间隔 self.img_fps=100 #每秒传输多少帧数 def Set_socket(self): self.client=socket.socket(socket.AF_INET,socket.SOCK_STREAM) self.client.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) def Socket_Connect(self): self.Set_socket() self.client.connect(self.addr_port) print("IP is %s:%d" % (self.addr_port[0],self.addr_port[1])) def RT_Image(self): #按照格式打包发送帧数和分辨率 self.name=self.addr_port[0]+" Camera" self.client.send(struct.pack("lhh", self.src, self.resolution[0], self.resolution[1])) while(1): info=struct.unpack("lhh",self.client.recv(8)) buf_size=info[0] #获取读的图片总长度 if buf_size: try: self.buf=b"" #代表bytes类型 temp_buf=self.buf while(buf_size): #读取每一张图片的长度 temp_buf=self.client.recv(buf_size) buf_size-=len(temp_buf) self.buf+=temp_buf #获取图片 data = numpy.fromstring(self.buf, dtype='uint8') #按uint8转换为图像矩阵 self.image = cv2.imdecode(data, 1) #图像解码 gray = cv2.cvtColor(self.image, cv2.COLOR_BGR2GRAY) cv2.imshow(self.name, self.image) #展示图片 except: pass; finally: if(cv2.waitKey(10)==27): #每10ms刷新一次图片,按‘ESC’(27)退出 self.client.close() cv2.destroyAllWindows() break def Get_Data(self,interval): showThread=threading.Thread(target=self.RT_Image) showThread.start() if __name__ == '__main__': camera=Camera_Connect_Object() camera.addr_port[0]=input("Please input IP:") camera.addr_port=tuple(camera.addr_port) camera.Socket_Connect() camera.Get_Data(camera.interval)[/mw_shl_code] 运行效果还是比较流畅的,因为传输网络视频流,所以画质欠佳。 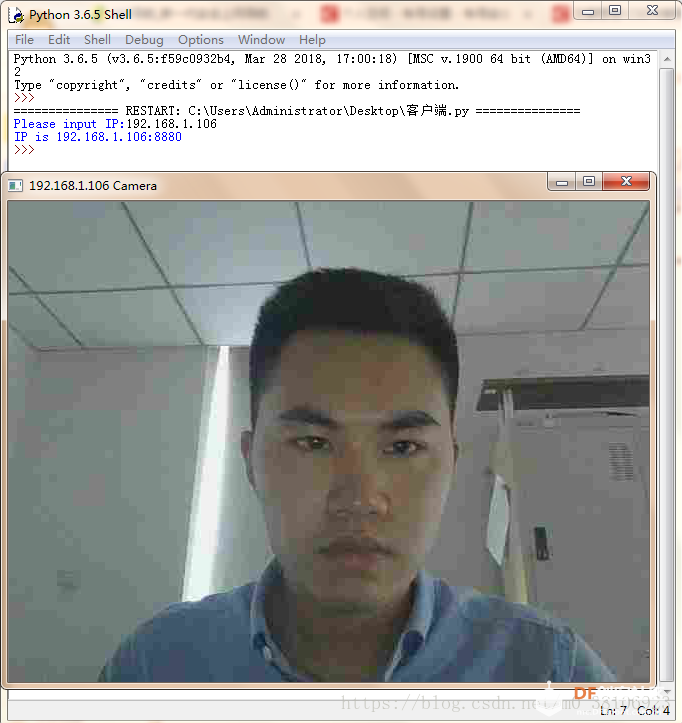 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






