|
34781| 12
|
[选型&资源] arduino学习中常用电机科普之步进电机 |

|
本帖最后由 代码应该敲的东 于 2020-7-1 08:58 编辑 由于前段在学习Arduino控制一个小马达的时候,才开始接触电机,不接触不知道,一接触发现电机的种类还挺多的。搞得我晕头转向的, 然后花了点时间总结了arduino常常用到的电机,算是做个总结, 也是给小白分享一下电机小知识,如果有错,欢迎纠正,我及时更正。 本篇帖接着上篇arduino学习中常用电机科普之直流有刷电机与无刷电机 ,继续科普,这次主要讲步进电机的工作原理。 步进电机工作原理  ]每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。   从上图可以看出步进电机的转子周围均匀分布有电磁铁,可通过控制电磁铁来控制转子的步进运动。 是不是还看不懂呢?没关系,下面来更详细的讲解一下过程。 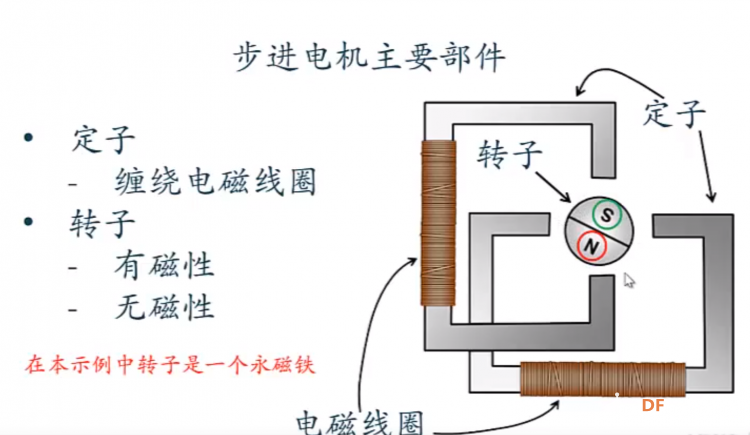 为了更方便看到过程,简化其中一个定子,如下图: 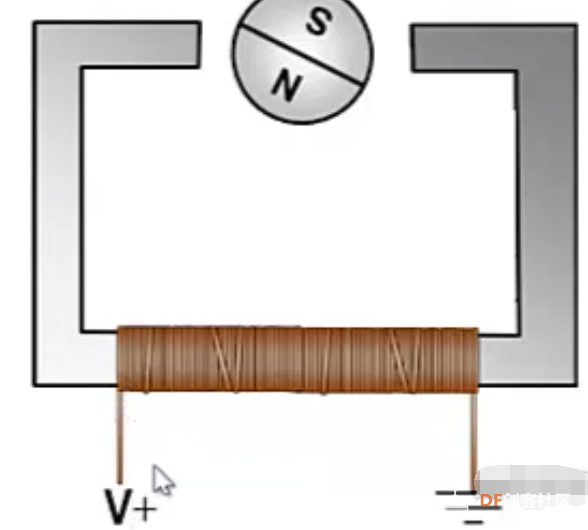 通电以后线圈将产生电流,线圈电流将产生电磁场。如下图: 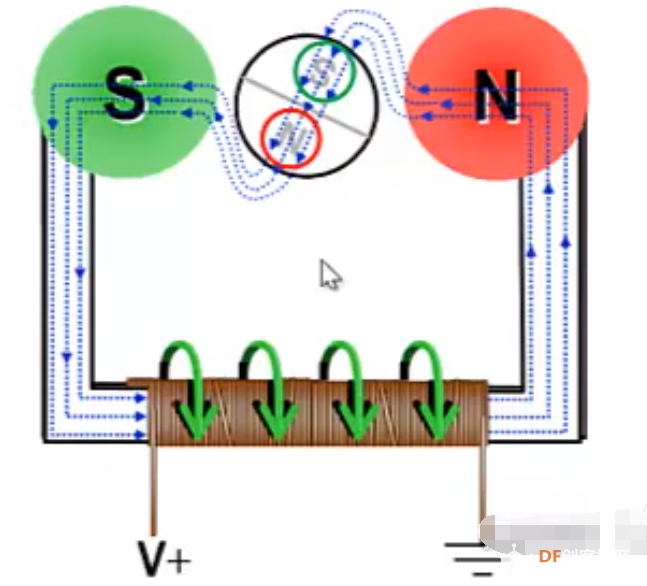 电子在电磁场作用下转动,如下图: 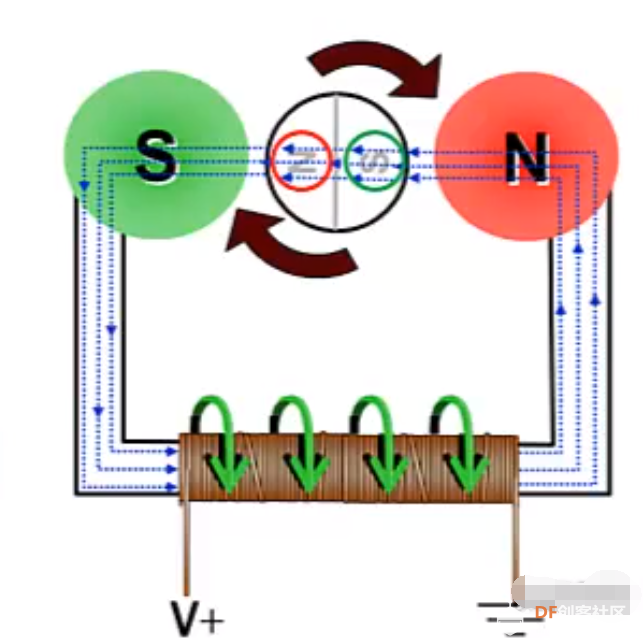 别小看转动的一步,其实是我们理解步进电机的一大步哟,哈哈。我相信你在回过头去看上面的动图,是不是就秃然大悟了呢? ”相” 就是说明步进电机有几个线圈(也叫做绕组)。 “线” 就是说明步进电机有几个接线口。 “极性” 分为 单极性 和 双极性。 电机也分单极性步进电机和双极性步进电机。 什么是双极性呢? 如果步进电机的线圈是可以双向导电的,那么这个步进电机就是双极性的, 相反,如果步进电机的线圈是只允许单向导电的,那么这个步进电机就是单极性的。  上图中的线圈是可以双向导电的,所以是双极性步进电机。下图的线圈中间导线总是接电源正极(也有总是接电源负极的),所以对应得定子导线接地。  通电后受到电磁场得作用,转子移动。如下图: 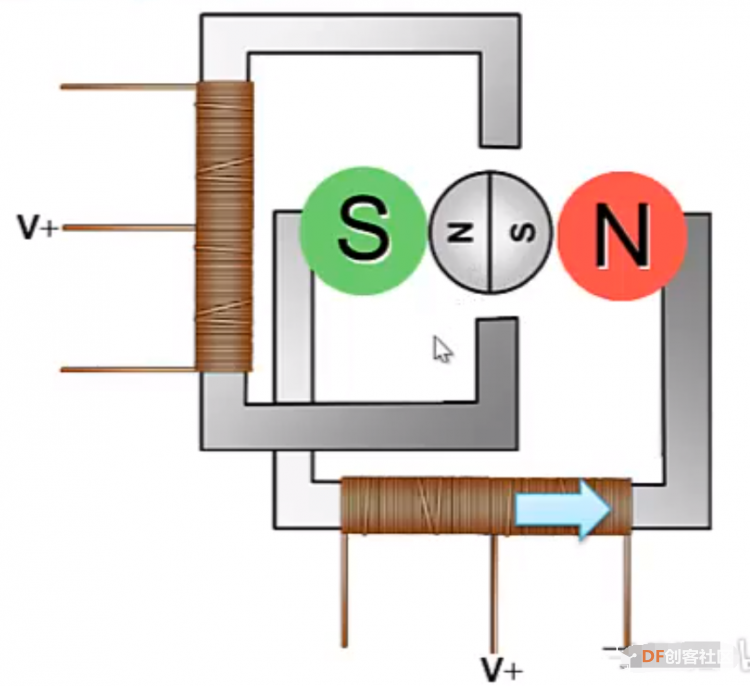 此时这个线圈断电,另一个线圈通电后,转子又会发生改变。 可以发现,电源正极一直不变,通过改变电源接地得位置来改变电磁场,从而改变转子转动角度。 单/双极性步进电机比较 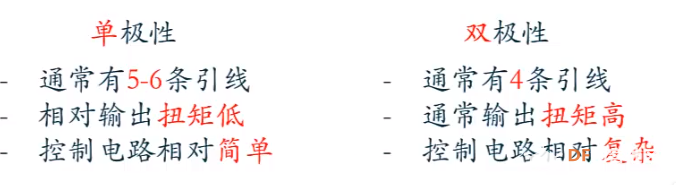 为什么?单极性的相对输出扭矩低,控制电路相对简单,双极性的输出扭矩高,控制电路相对复杂呢? 因为单极性步进电机通常只有一个线圈通电(所以控制电路相对简单),形成的磁场弱,所以输出扭矩相对较弱; 双极性步进电机通常是多个线圈一起通电(所以控制电路相对复杂),形成的磁场强,所以输出扭矩高。 步进电机基本参数 额定电流:指电机可以长期连续工作的电流。 额定电压:指电机可以长期连续工作的电压。 定位转矩:电机不通电时,转子自身的锁定力矩。 保持转矩:电机通电但没有转动时,定子锁定转子的力矩。 相数:可独立通电的定子电磁圈数。 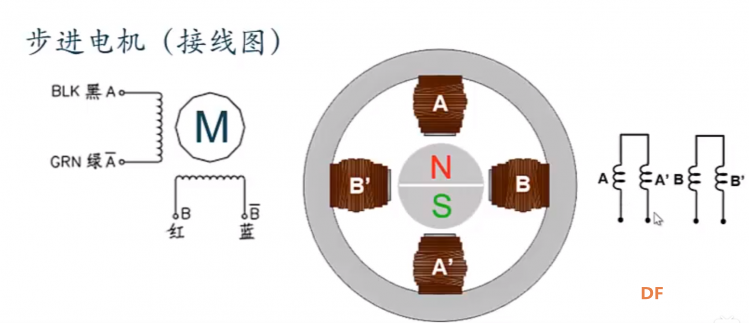 由图可以看出其实A与A',B与B'其实是串联在一起的,所以只有两个独立供电的线圈,这叫双相四线步进电机。看线圈一般看接线图就能看出来是几相的。 步进电机分类除了根据极性可以分为,单极性步进电机和双极性步进电机之外,还可以根据转子的磁性分为:永磁式步进电机,反应式步进电机(转子用软磁材料制成,软磁材料自身不具有任何磁性但易于被周围磁场吸引),以及混合式步进电机。 DFRobot的混合式步进电机-42BYGH40-1.8-22A,如下图不用多说,它是属于双极性混合式的步进电机。  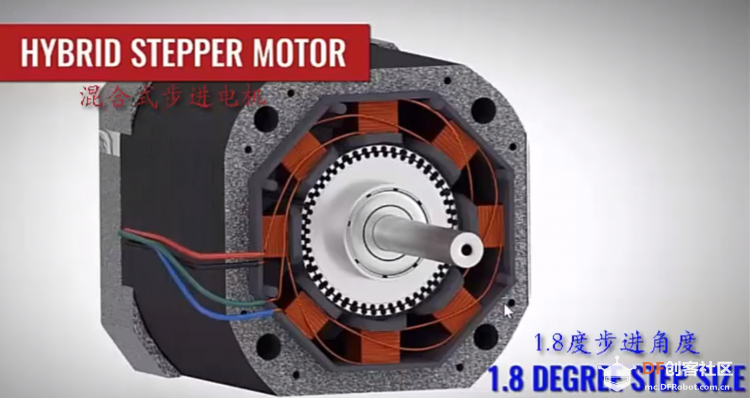 下面来看看这种电机的转子解构。 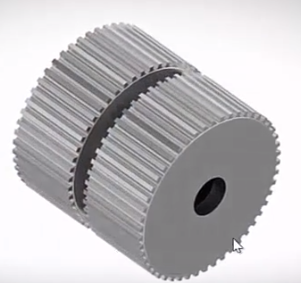 转子内部,如下图: 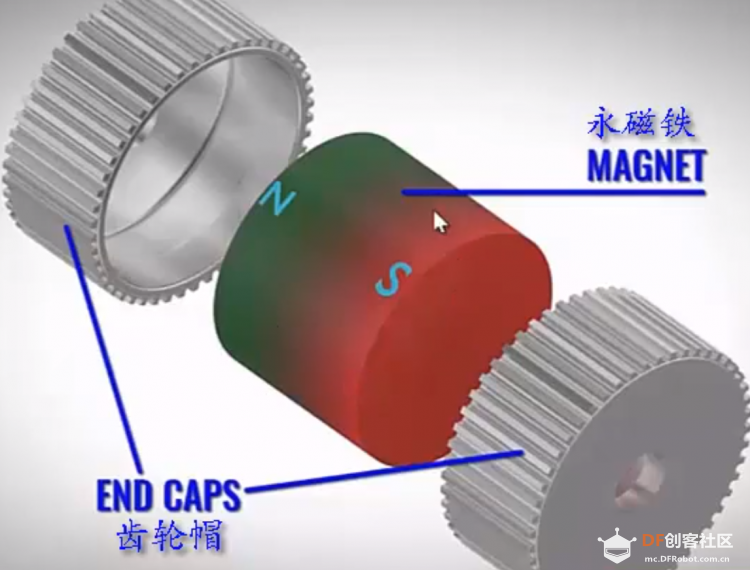 里面由永磁铁,齿轮帽构成。齿轮帽本身不带磁性,但是和永磁铁挨一起了,就有了磁性,如下图: 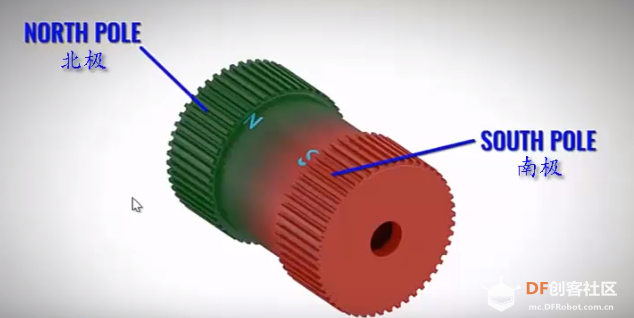 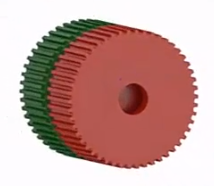 看完了转子,我们来分析定子。转子有50个齿,定子只有48个齿。  为了便于理解,进行分组,如下图: 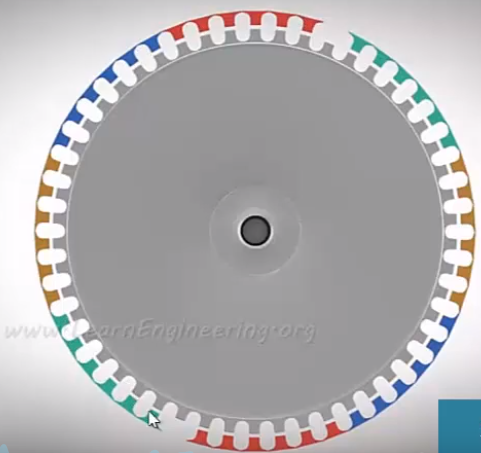 不知道大家发现了没有,上图中的定子和转子并没有对齐呀,其实只是为了方便大家理解,实际上它是对齐了的,如下图所示:  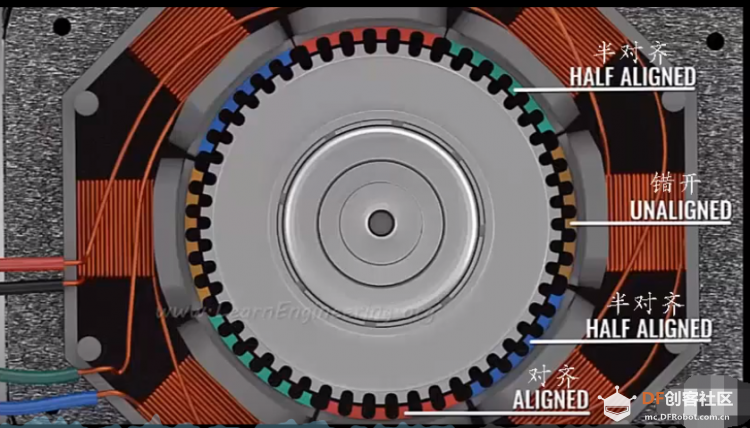 从下图可以看到它其实只有两个独立通电的线圈。 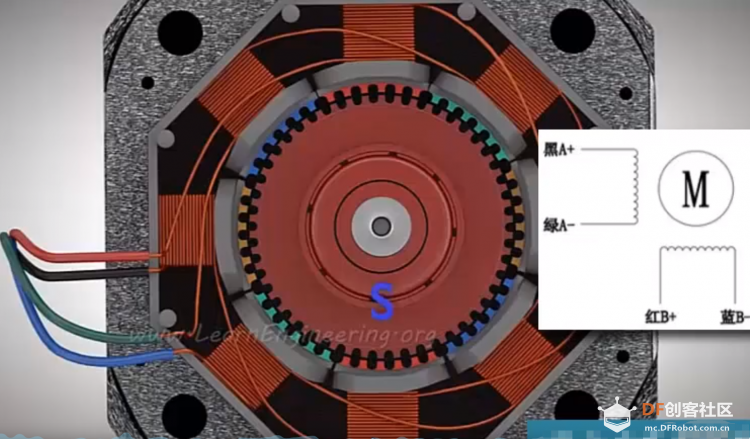 我们将两个线圈进行标识为A和B,如下图:  这是给线圈A通电,如下图:转子齿是S极,线圈会产生磁场,由于异性相吸,所以红色的定子齿会和转子齿相吸引,由于同性互斥,所以黄色的齿会排斥转子齿。 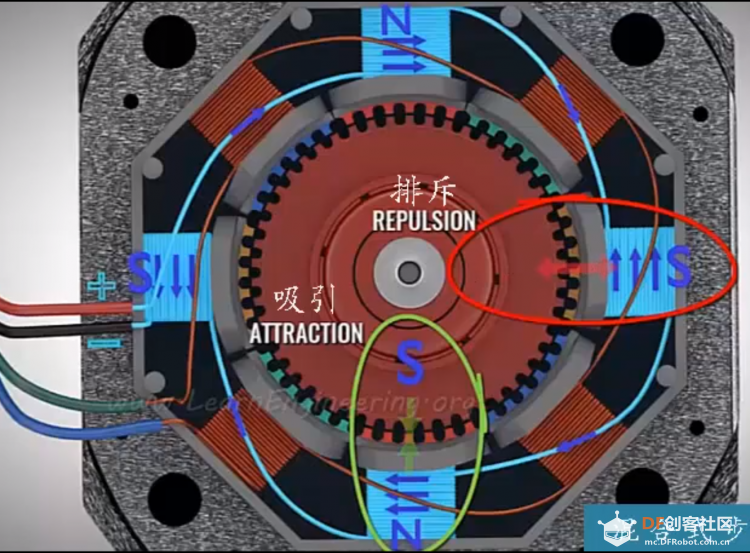 当给线圈A断电,线圈B通电后,如下图:  磁场发生了变化,定子会发生微小的转动,会转动1.8度,如下图:转子齿是S极,线圈会产生磁场,由于异性相吸,所以蓝色的定子齿会和转子齿相吸引,由于同性互斥,所以绿色的齿会排斥转子齿。 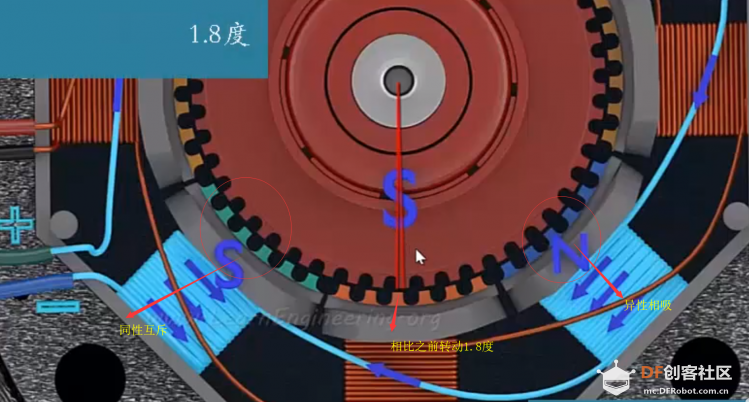 转子北极的原理和南极是完全相同的,为了节省篇幅就不做讲解了。 值得注意的是,这是半步进的驱动方式,走一步是1.8度,如果是两个线圈同时都通电的话,就是全步进驱动方式了,走一步是0.9度。这样控制更加精确。 步进电机优点 - 可精确控制电机输出轴角度 - 低速运行时 可获得更高的扭矩 - 开环控制/性价比高 步进电机应用场景 - 3D打印机 - 机器人等 电机驱动板 本贴初衷是为了科普电机构造原理,就不讲程序了。 常用的电机驱动板有:A4988电机驱动板,TMC260驱动板等等。DFRobot也有很多相关的驱动板,这些驱动板,都有成熟的函数库,并且有详细的驱动使用说明。  下一篇将给大家带来直流伺服电机(舵机)科普。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 额,好吧,以后多多改进,想想怎么写更简单易懂
额,好吧,以后多多改进,想想怎么写更简单易懂






