|
7122| 3
|
[项目] 用掌控板和Blynk做个遥控坦克 |

|
项目背景 手上有个 Devastator 履带机器人移动平台,组装好放了好久了,一直放着没用过。拿出来做个遥控坦克吧! 效果演示 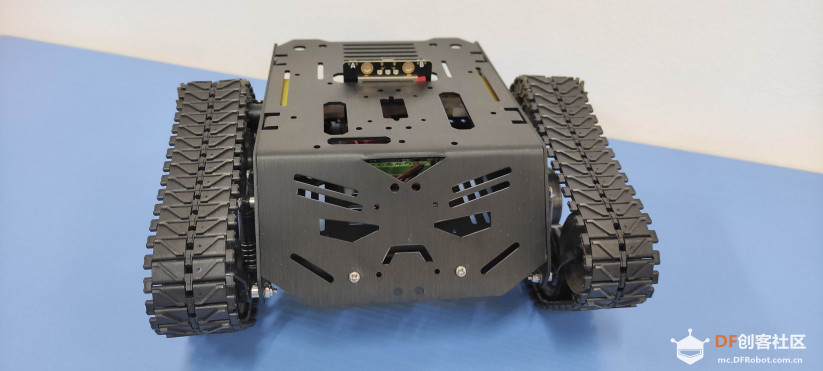 做好的样子是这样的。我用 Blynk 做了一个遥控器:  我们先看看最终效果吧。 材料清单 主控板我选择了掌控板,因为自带无线模块和蓝牙模块,方便连接控制。扩展板用到了 micro:bit 四电机八舵机那款扩展板。感谢大其老师为掌控板编写了用户库,我们可以直接调用。
制作过程 步骤 1 器材连接 组装好坦克后,将两个电机接到扩展板的电机驱动上。因为两个电机的方向是相对的,所以如果按照正常接线,我们都用前进指令,必定会一个朝前,一个朝后。因此接线的时候我们直接把其中一个电机线反接,这样就写代码的时候比较直观。 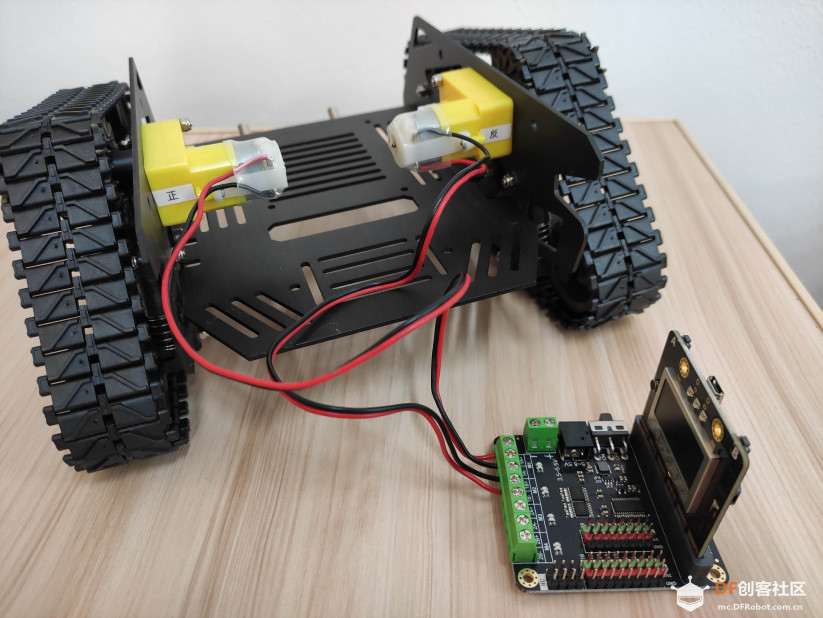 从后面看,左侧电机正常接线,右侧电机反接。接好以后使用 6mm*3M 的尼龙铜柱固定在坦克底座上。 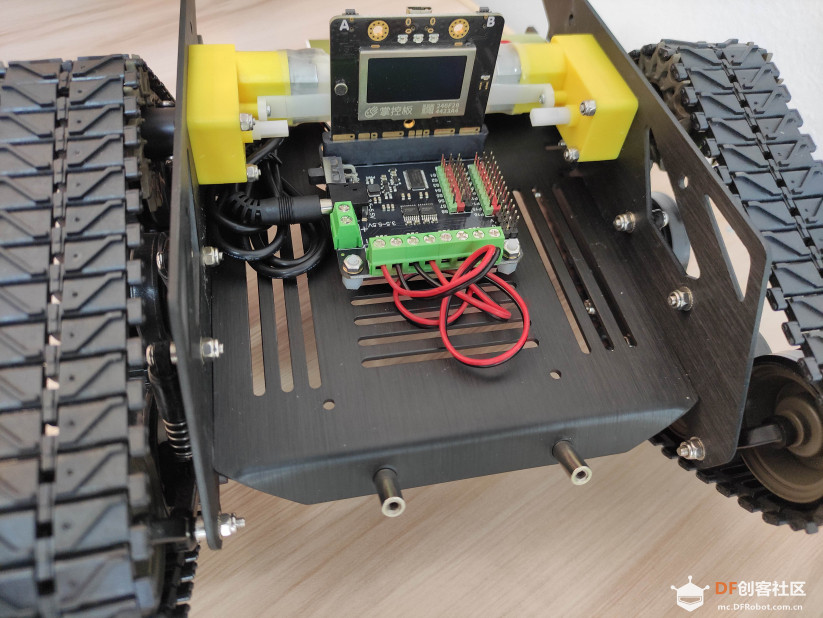 掌控板需要反过来插入扩展板,在这边刚好是朝前的。 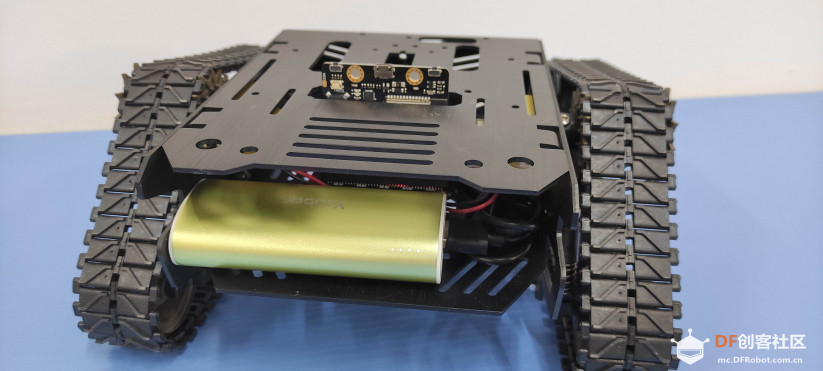 我们可以在后面放一个小型充电宝进行供电。这样方便使用,无需另行购买电池,而且便于充电。掌控板 USB 接口刚好在顶部露出,便于程序上传。屏幕不能完全露出来有点遗憾。 步骤 2 创建 Blynk 项目 打开手机上的 Blynk 应用,点击首页上的【New Project】创建项目。填写项目名称,选择设备类型为【ESP32 Dev Board】,连接类型选择【BLE】。 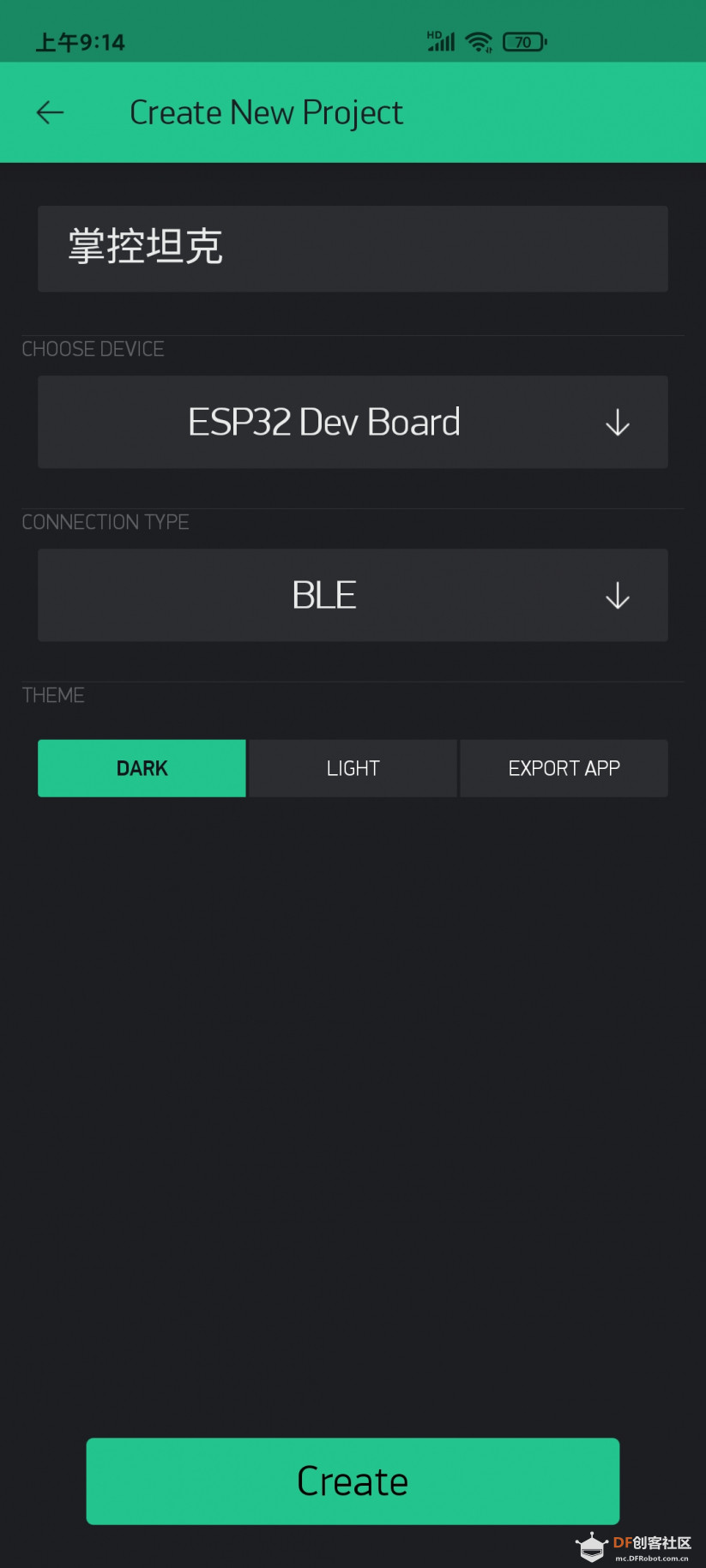 创建完成后点击项目空白处或右上角的【+】按钮添加控件。需要添加四个【Button】。 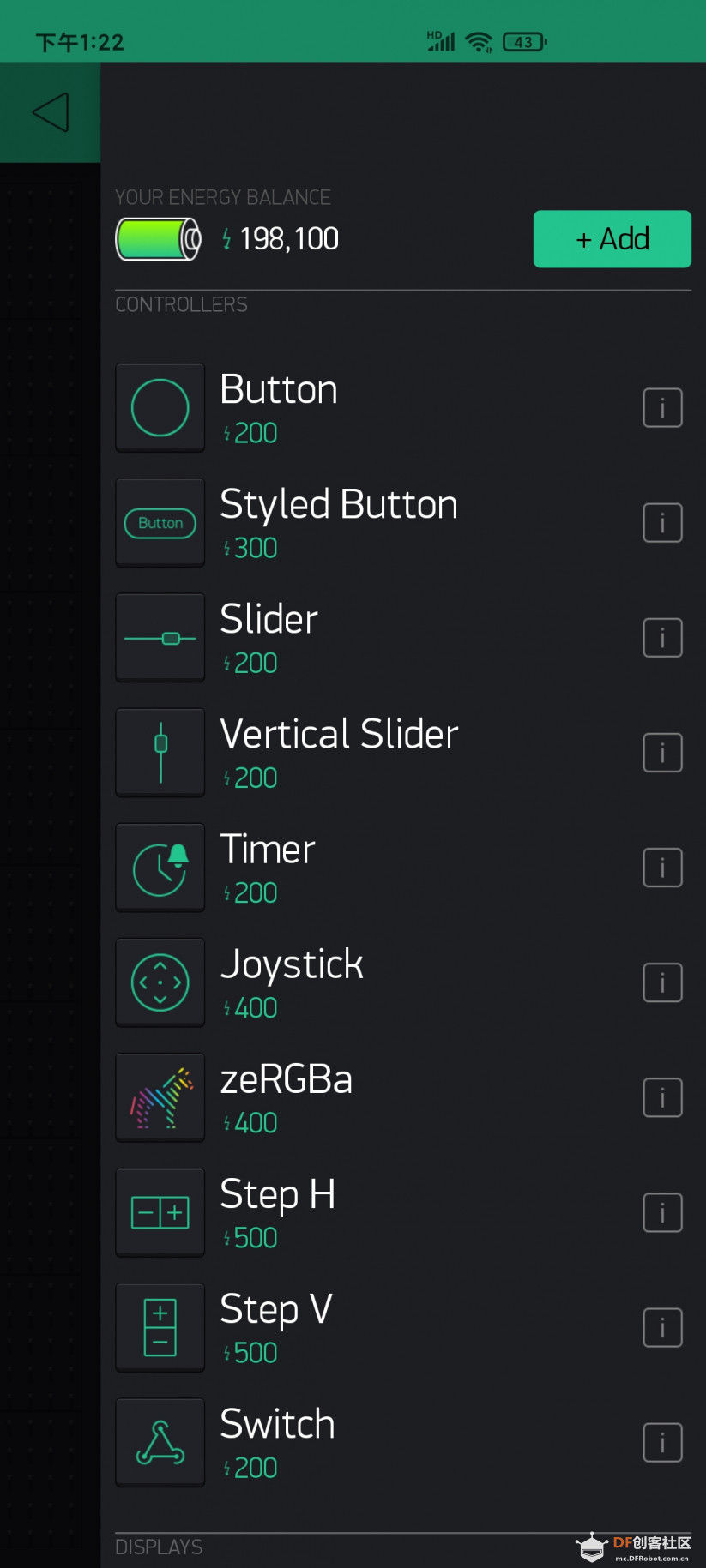 然后选择下方的【BLE】。 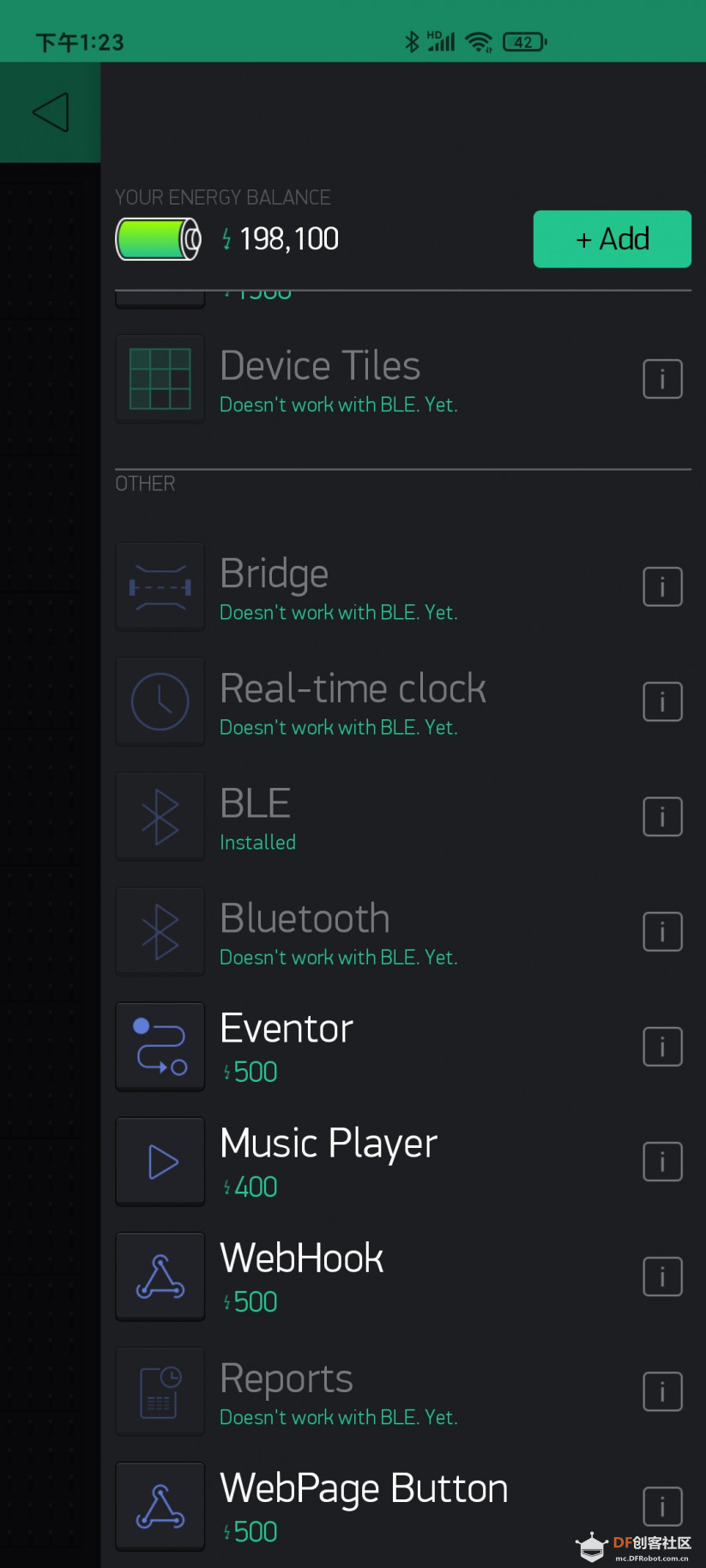 完成控件添加后需要修改相关属性。以前进按钮为例,设置名称为【前】,按钮开和关文字标注也为【前】,选择引脚为虚拟引脚 V0。  其他按钮属性的设置类似,完成后如下: 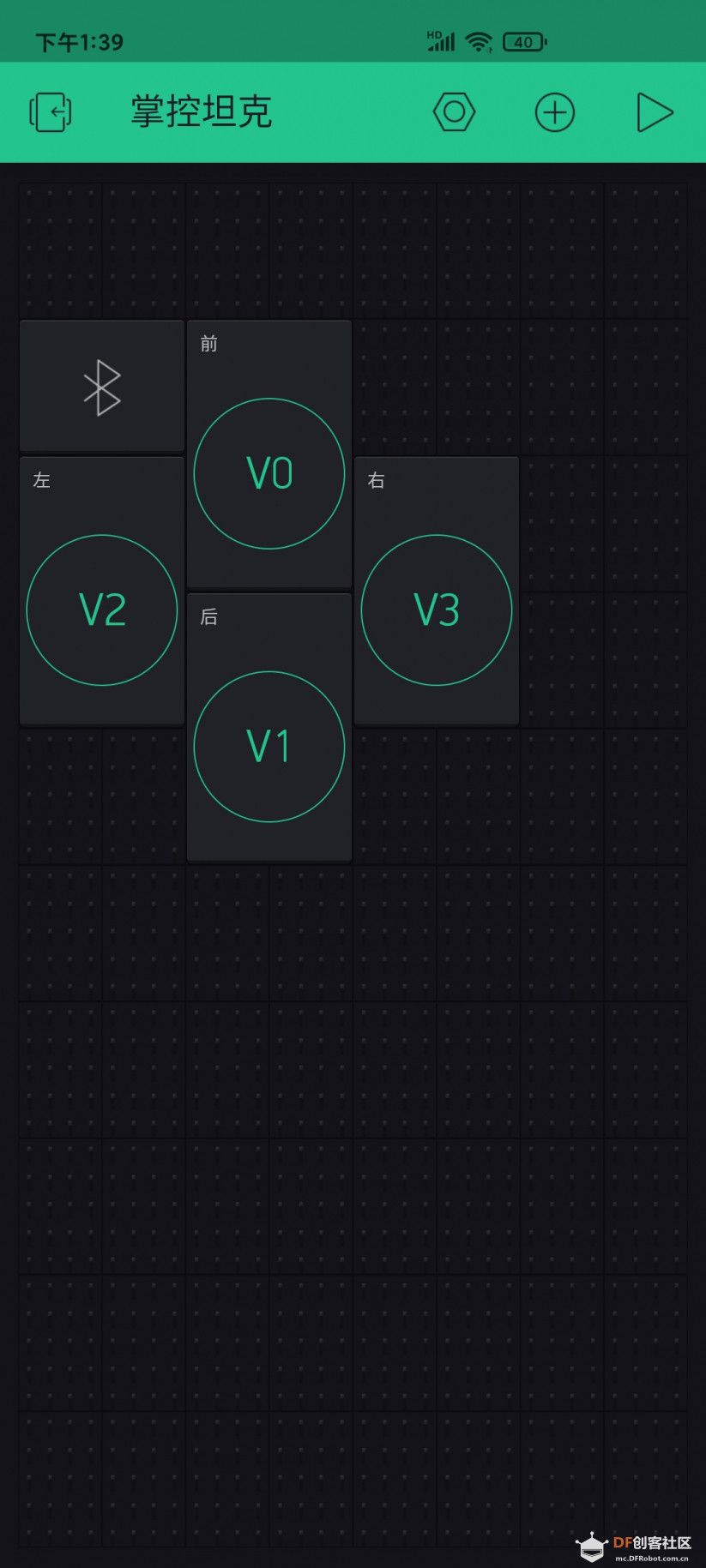 在使用之前,需要点击蓝牙按钮,选择【Connect BLE device】,选取要连接的蓝牙设备。我这边选择的是【Blynk】。 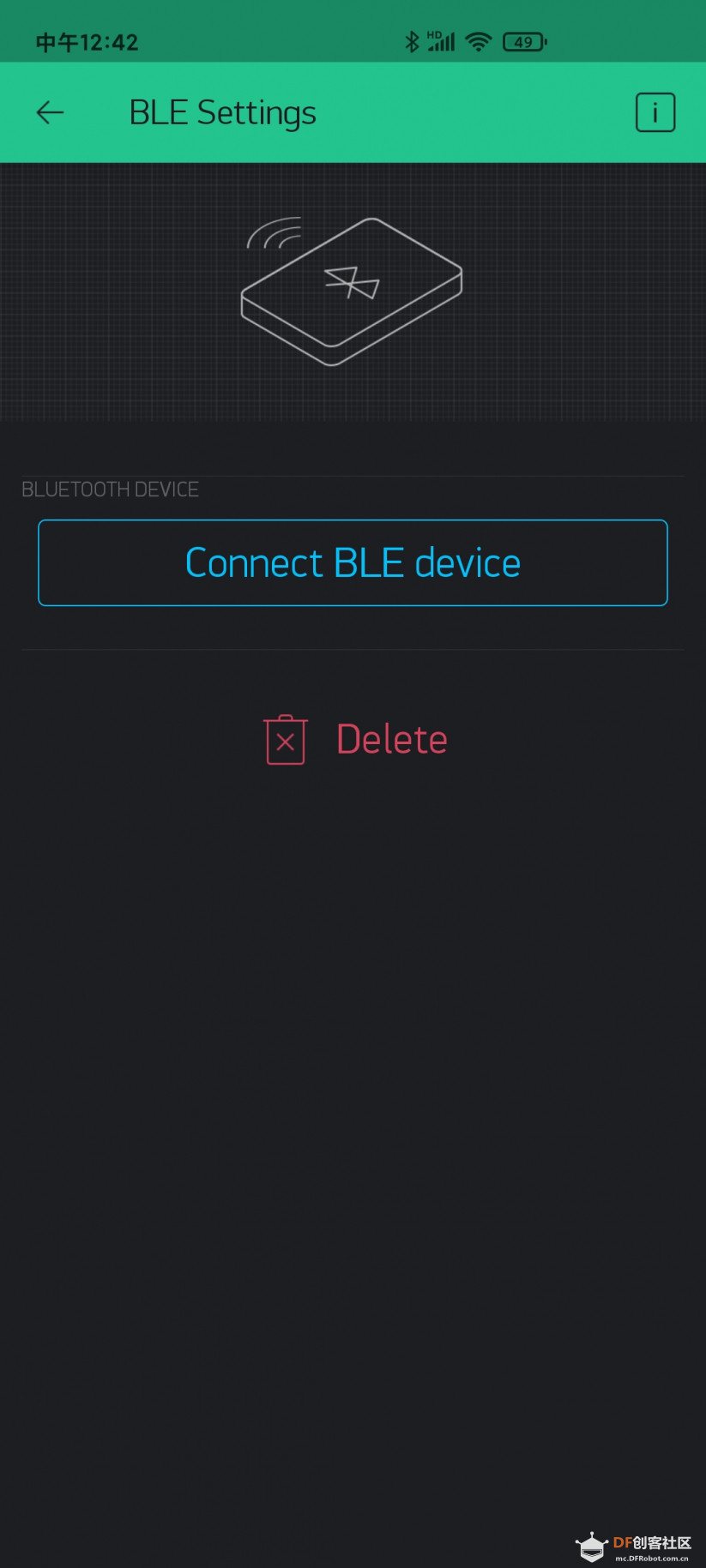 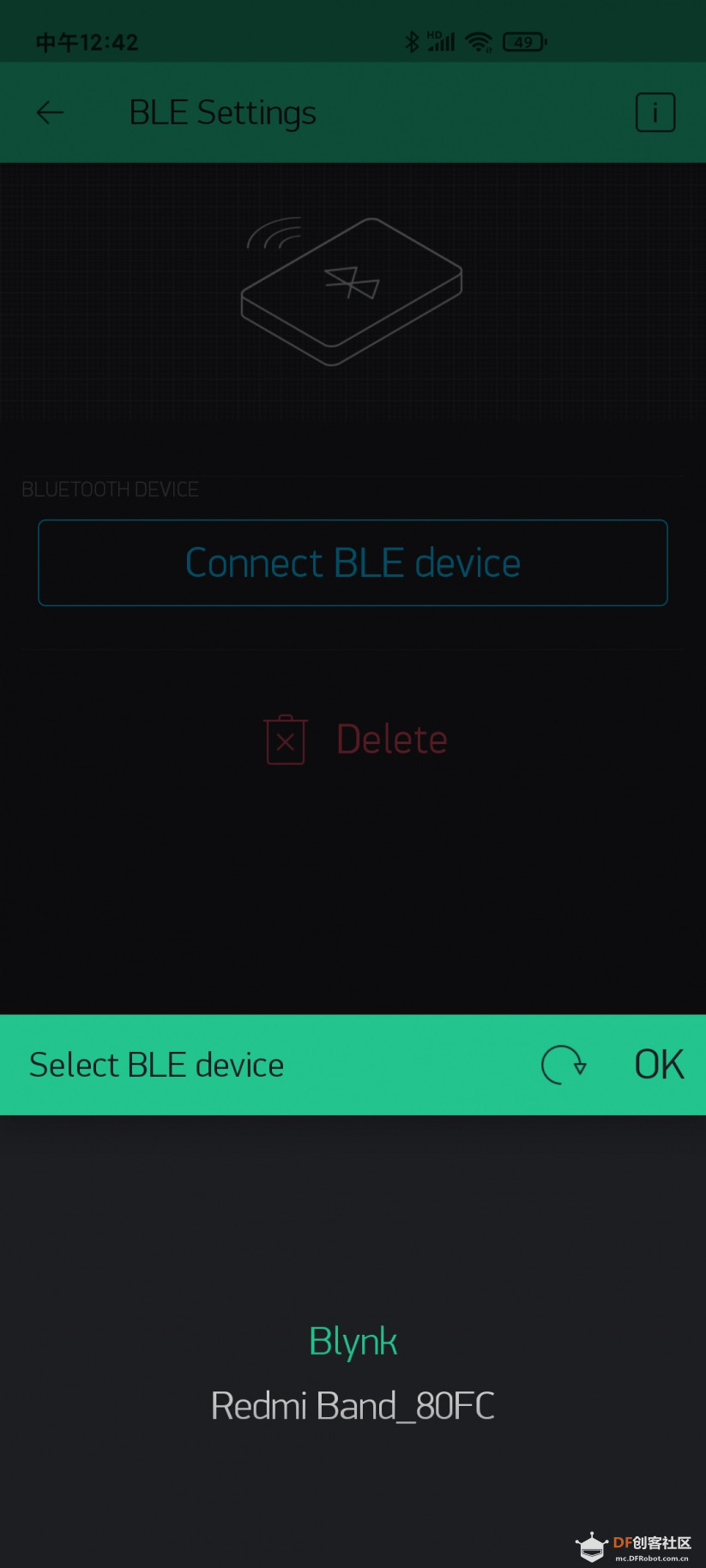 步骤 3 引入扩展 打开 Mind+,选择上传模式。点击左下角的扩展,选择【主控板】类别下的【掌控板】。  选择【用户库】分类,加入【电机扩展板】和【Blynk 物联网】两个用户库。 电机扩展板:https://gitee.com/chenqi1233/ext-esp_Motor Blynk 物联网:https://gitee.com/ironpanda/ext-blynk  步骤 4 编写代码 使用 Blynk 物联网使得创建物联网项目应用变得十分简单。这里我们用 BLE 进行通信,也就是低功率蓝牙通讯。使用之前需要填写 Blynk 项目的授权码,在手机上创建 Blynk 项目后会自动生成这个授权码,可以邮箱发送给自己或者直接复制。后面的蓝牙名称就是手机连接时显示的名称。我用的是默认的“Blynk”。主程序中始终运行 Blynk 进程,这是固定的格式。 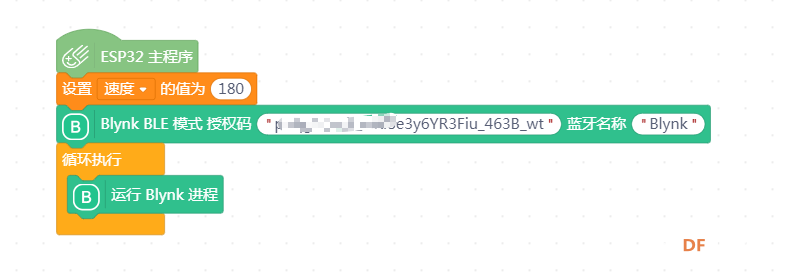 接下来编写前进按钮的代码。当前进按钮按下时,我们让坦克前进,即两个电机以特定的速度正转。我们可使用【当从 Blynk 虚拟引脚 V0 收到数据时执行】指令来编写代码。当 V0 收到数据的时候做一个判断,如果收到 1,则前进,否则停止。具体代码如下: 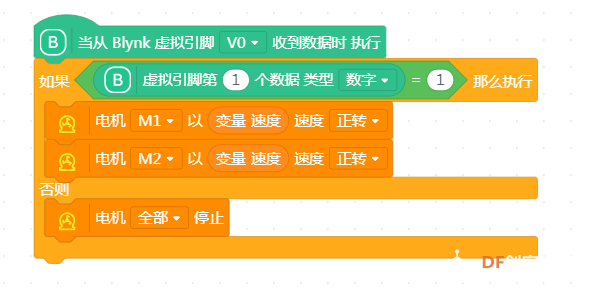 其他三个按钮代码类似。 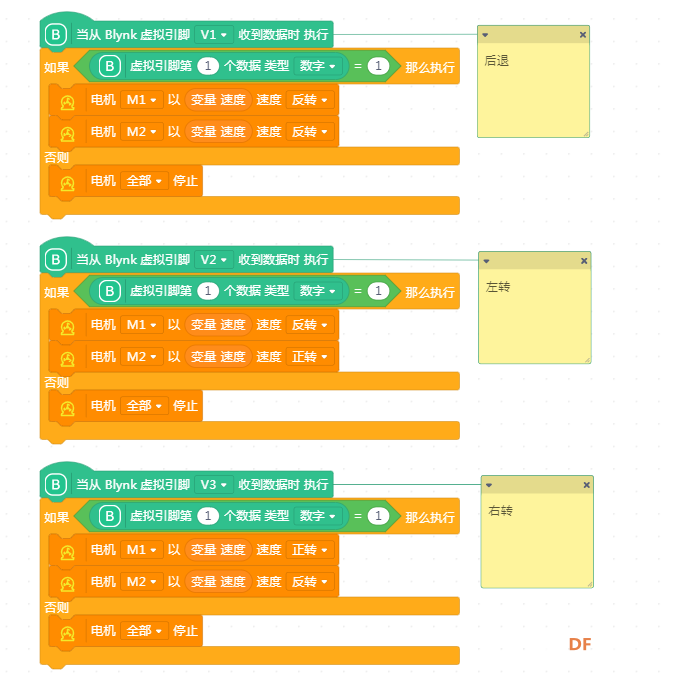 至此代码编写完成,上传到掌控板后就可以测试了。 附件  遥控坦克.rar 遥控坦克.rar |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






