|
14447| 12
|
[项目] 捡球机器人 |

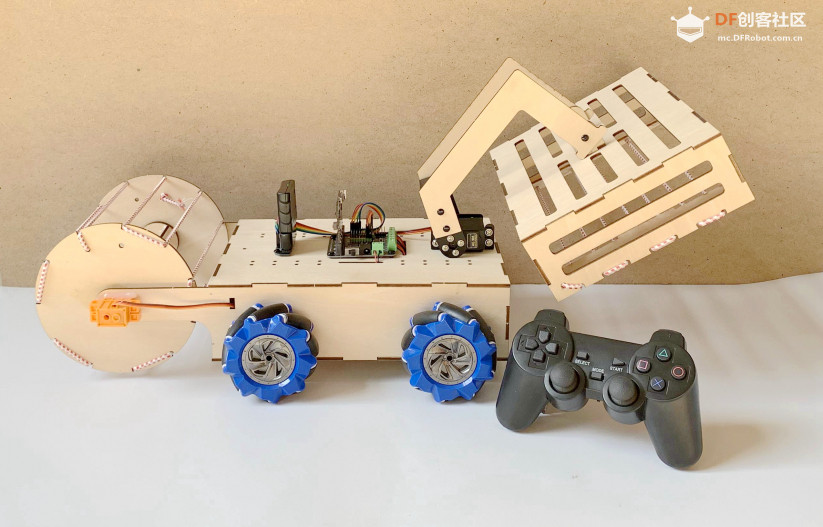 【制作背景】 我国的国球是乒乓球,有许多人从小开始学习打乒乓球,而在学习打乒乓的过程中,为了节约时间,通常会准备较多数量的乒乓球,在全部打落在地后,集中捡拾。目前通常情况下,是人们弯腰一个一个的捡拾,或者使用简单的捡拾工具,但也需要人们反复的捡拾,面对满地的乒乓球一个一个去捡,既浪费时间又消耗体力。如果有一个捡球的机器,可以让学员一边玩一边捡乒乓球,这样不但能实现捡球的目的,也让学员在休息的时候即不浪费体力,又玩得尽兴,劳逸结合。 【功能说明】 这个作品利用开源硬件制作而成,主要硬件有micro:bit主控板、micro:bit电机驱动扩展板、麦克纳姆轮、TT电机、舵机等。它主要有以下功能: 捡球机器人是通过遥控手柄来它的行走路径,在行走的过程中实现捡乒乓球的功能。小车的轮子采用了麦克纳姆轮,这样小车的行走方向更加灵活,行走的路径更加合理,捡球的速度也更快,从而可以节省更多的时间,而捡球的方式有两种,一种通过小车前面装置滚动的方式来实现捡球,另一种是车后下压的方式实现捡球效果,根据乒乓球所处的不同位置,采用不同的捡球方式,从而加快捡球的速度。 【硬件清单】 Micro:bit 1 micro:bit 电机驱动扩展板 1 PS手柄 1 360度舵机 1 995舵机 1 TT电机 4 麦克纳姆轮 4 杜邦线及附材 椴木板切割部件 【制作过程】 1、设计结构件图纸,并用激光切割机切割出来。  2、把4个TT电机分别用螺丝固定在两个侧面板上。 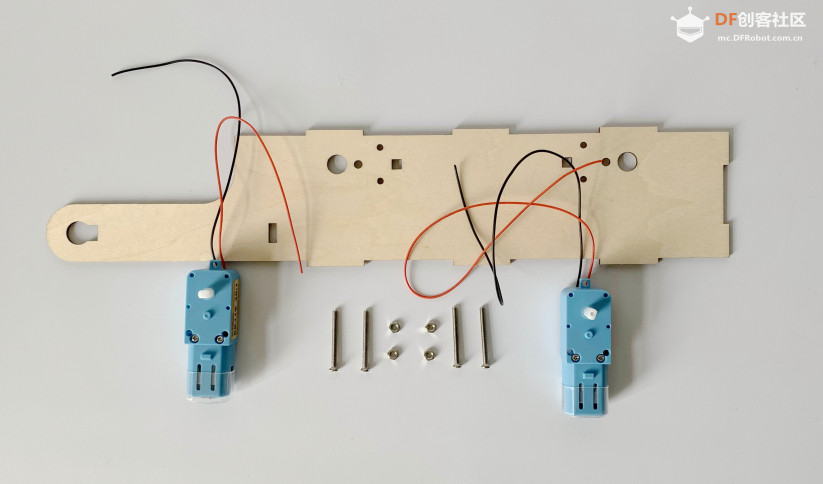 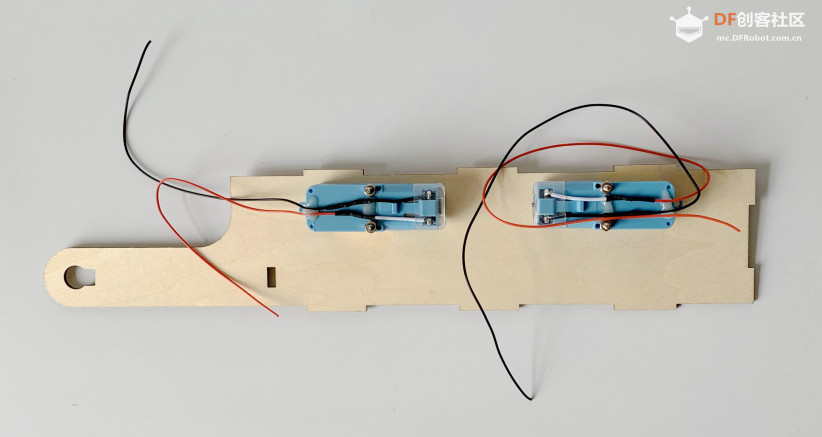 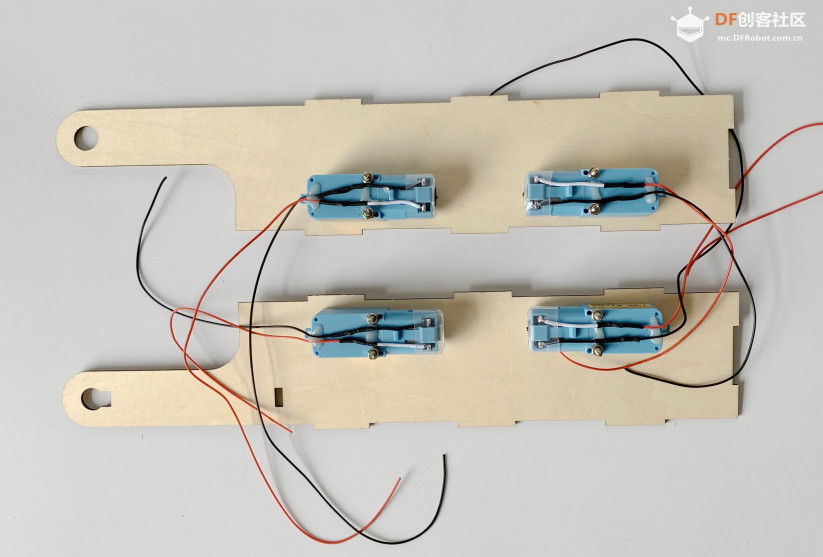 3、把4个侧面板与底板固定在一起,为了使结构更加牢固,可以用热熔胶进行加固,如果为了以后拆卸方便,可以用小M1的自攻螺丝进行固定。 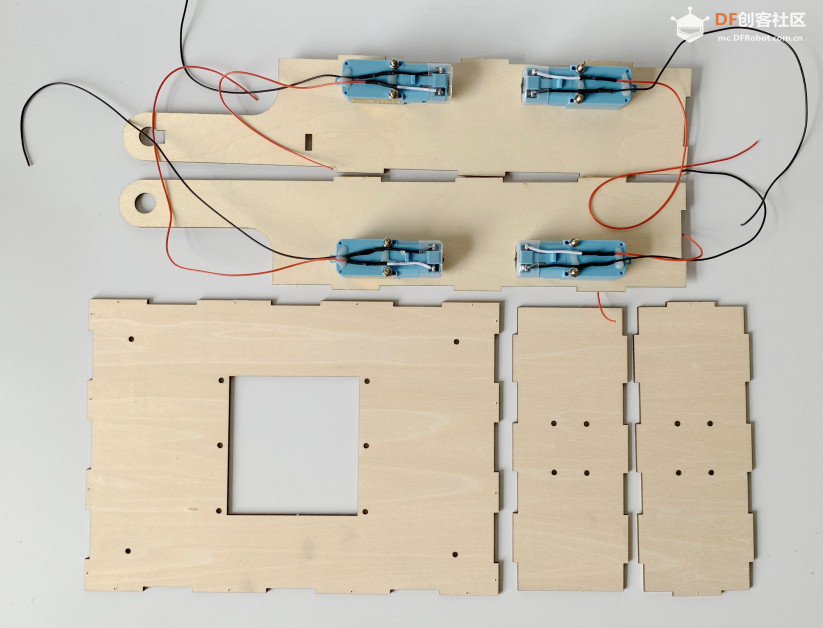 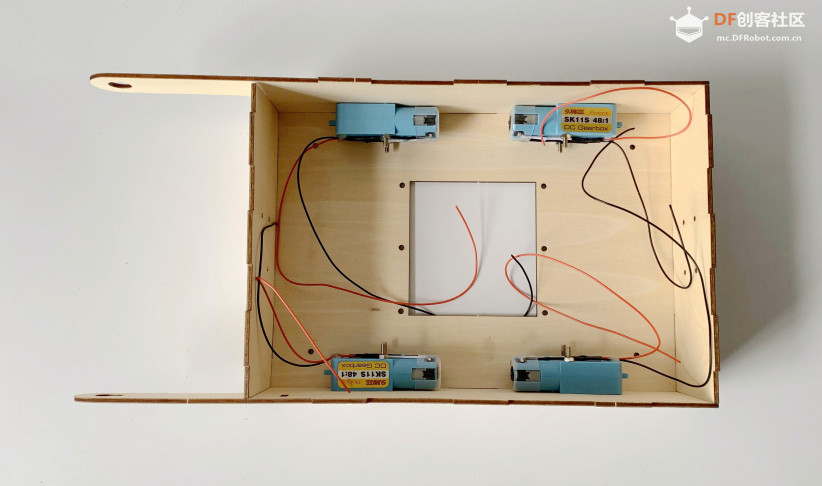 4、分别把360度舵机和微型挡边法兰小轴承安装在侧面板相应的位置,360度舵机用热熔胶固定,轴承用502胶水固定。 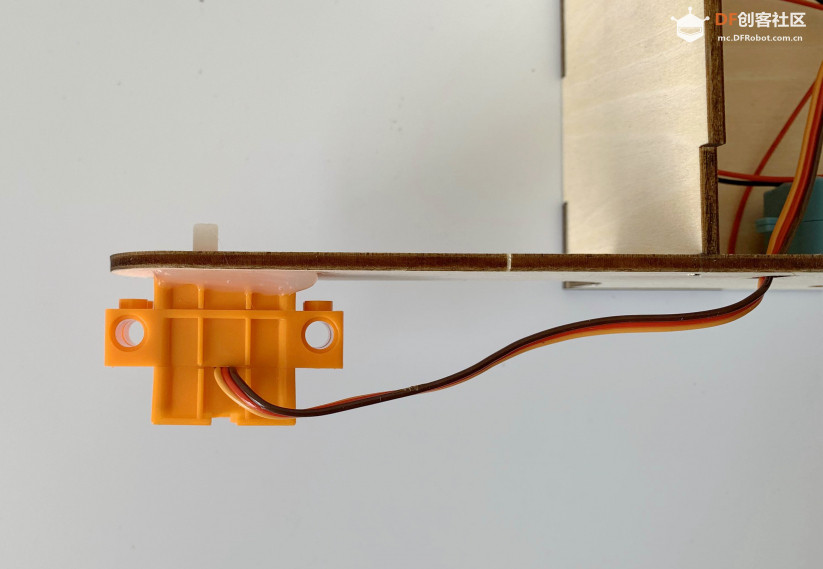 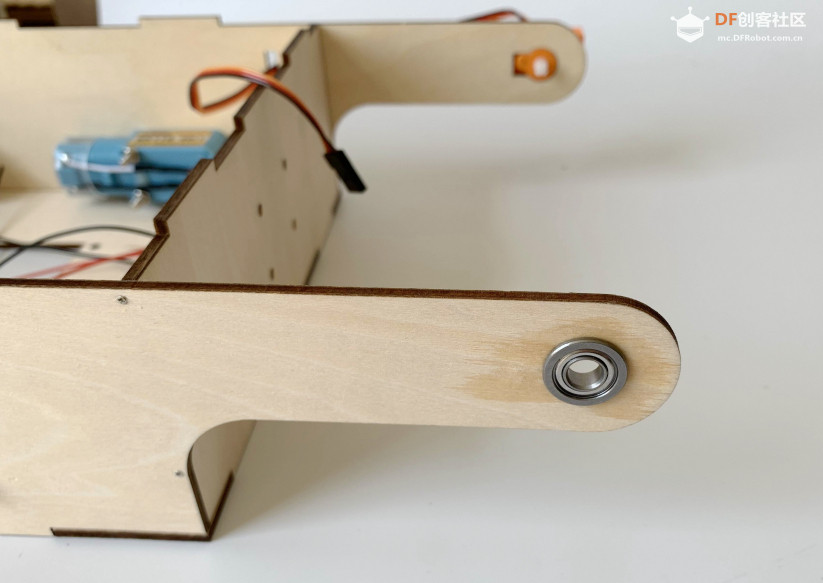 5、按下图步骤安装好小车前端的乒乓球收集器,各部分之间用502胶水和热熔胶固定。 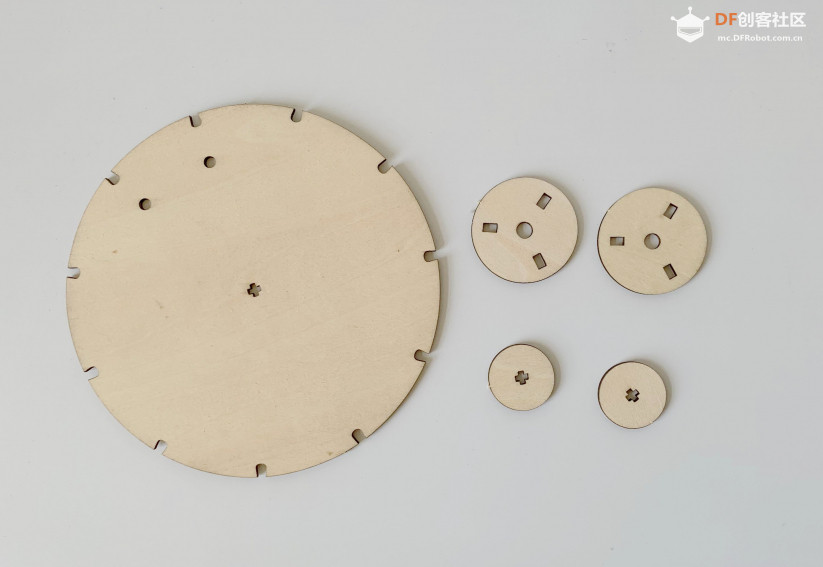  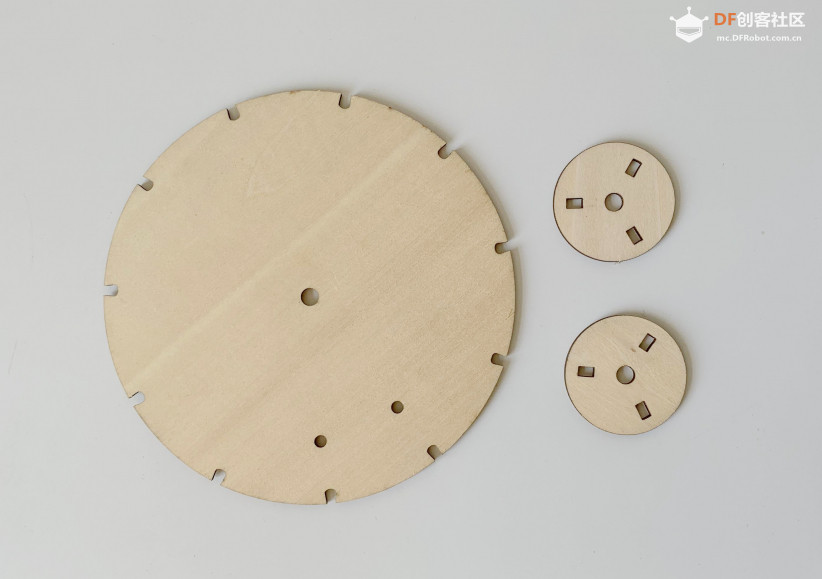   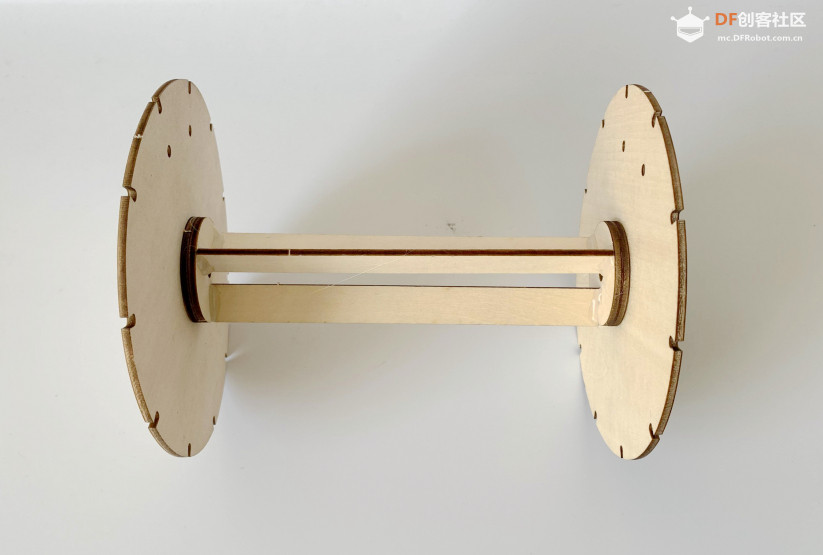 6、安装好橡皮松紧带,并用一根圆木棒把它安装在侧面板之间,这样360度舵机就会带动乒乓球收集器转动。 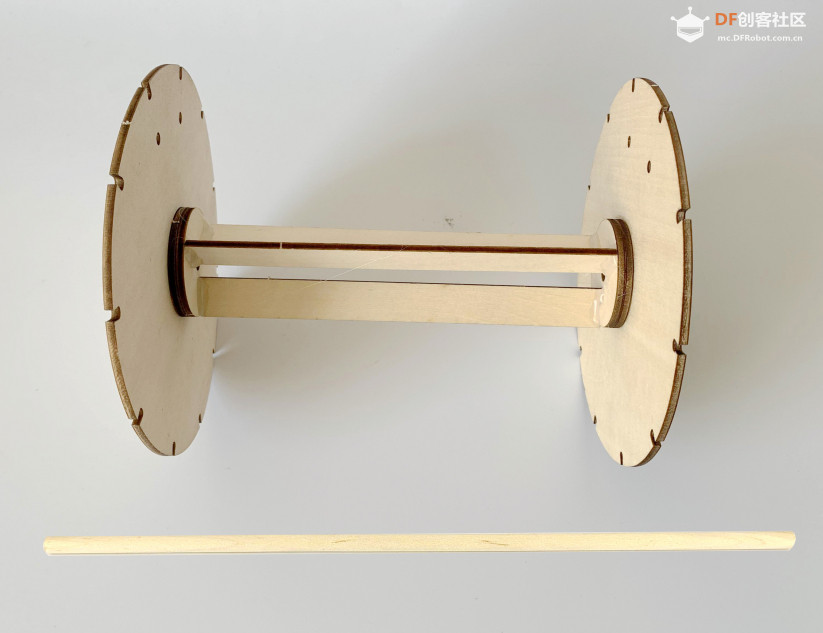 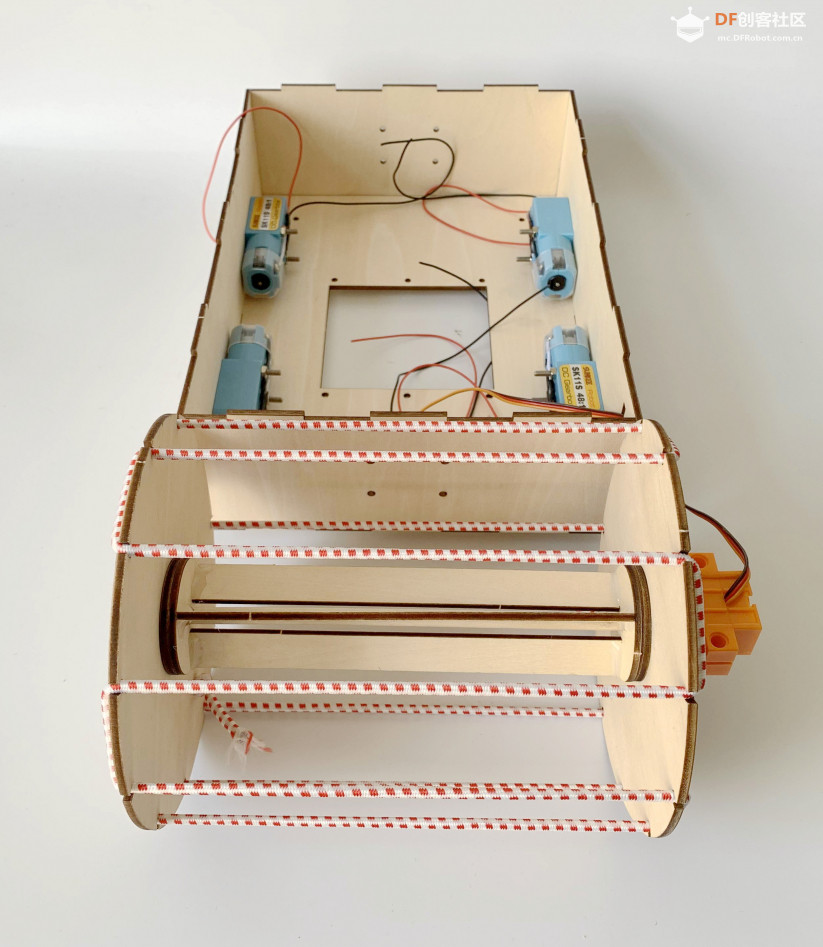 7、把两个电池盒和一个开关安装在相应的木板上,其中5号电池盒通过开关来控制。 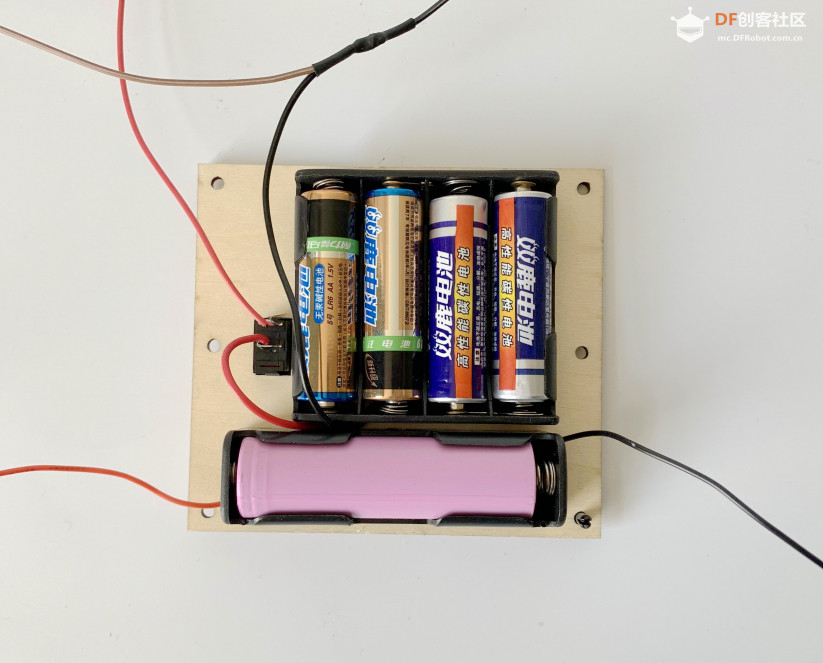 8、把安装有电池的木板用铆钉固定在底板上,这样便于更换电池,再安装上4个麦克纳姆轮,安装的时候注意4个轮子的安装方向,正确安装方法如下图,如果方向或顺序弄错了,就会导致小车不会按要求行驶。 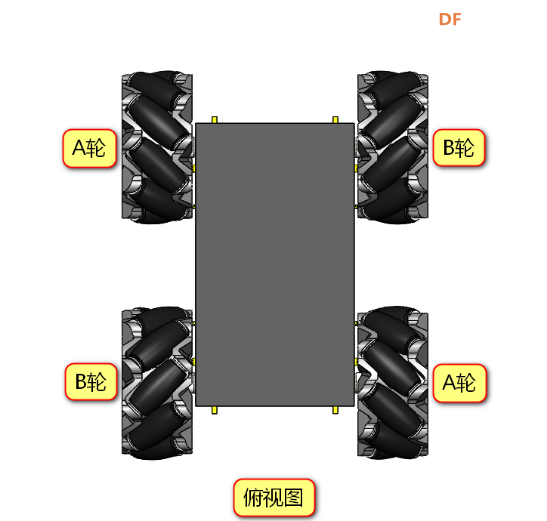 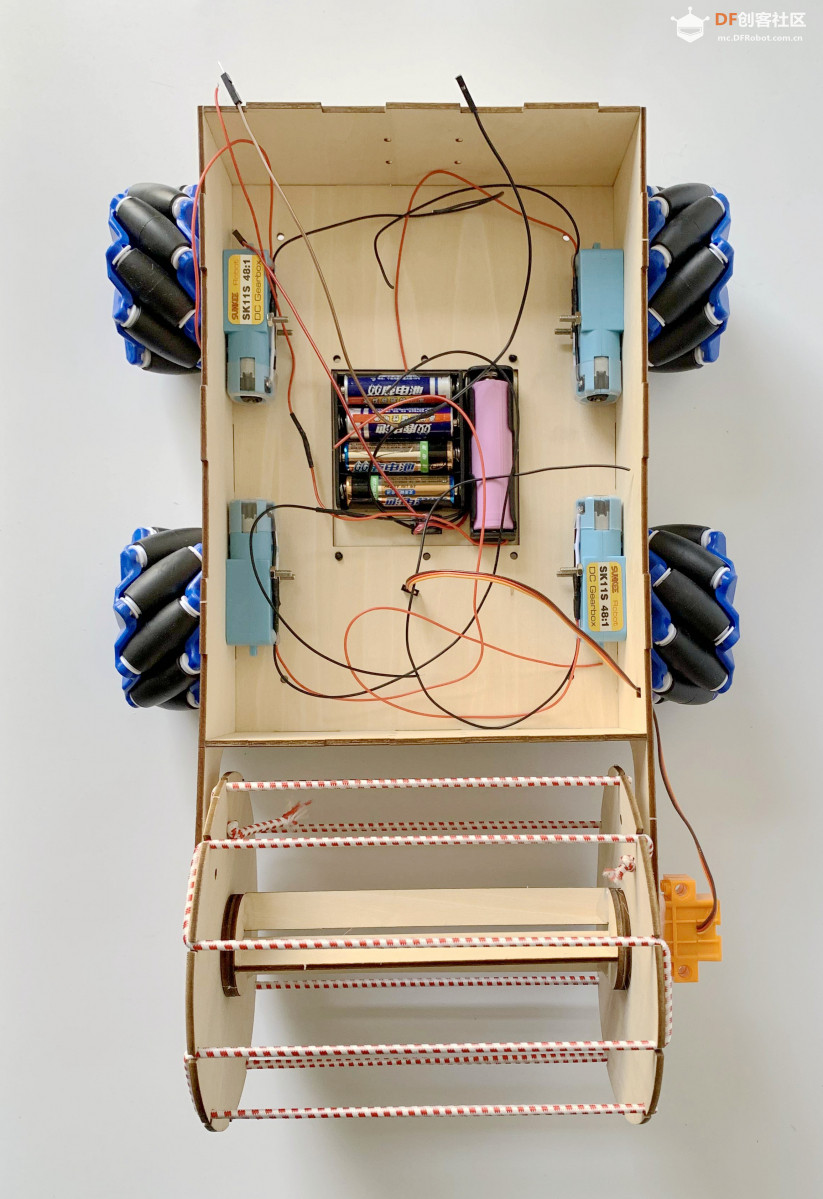 9、把扩展板、PS手柄接收器、995舵机安装在顶部面板上。 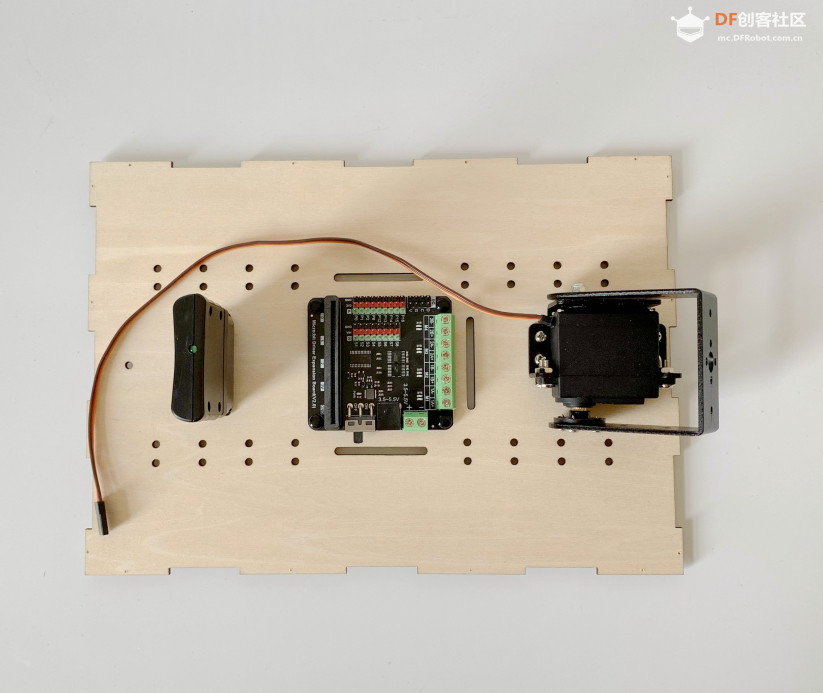 10、把各个传感器与扩展板边好线,并把它安装在小车上。 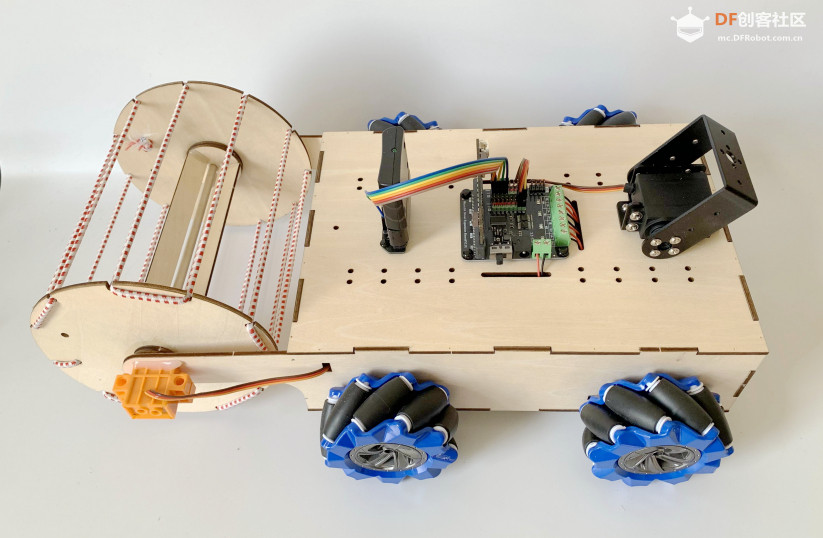 11、如下图所示,安装好另一个乒乓球收集器。    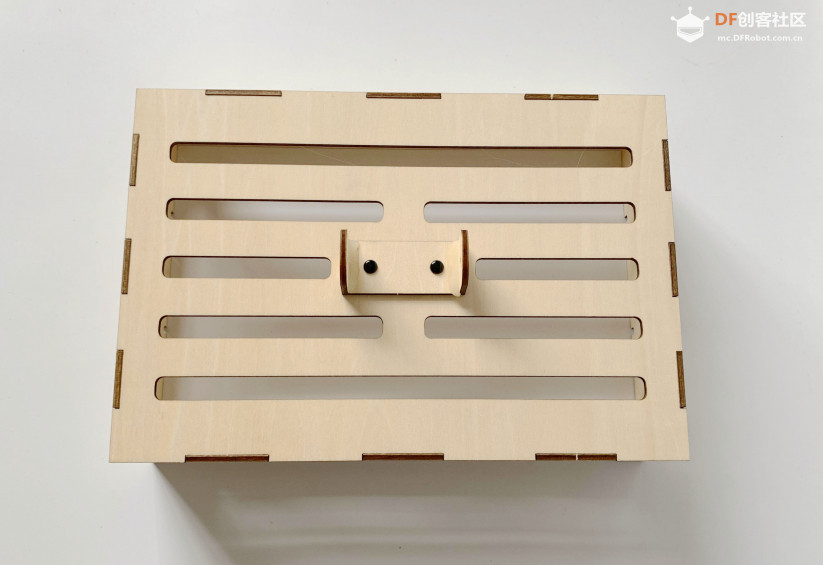 12、绕上橡皮筯松紧带,并用连接件把乒乓球收集器与995舵机进行连接。 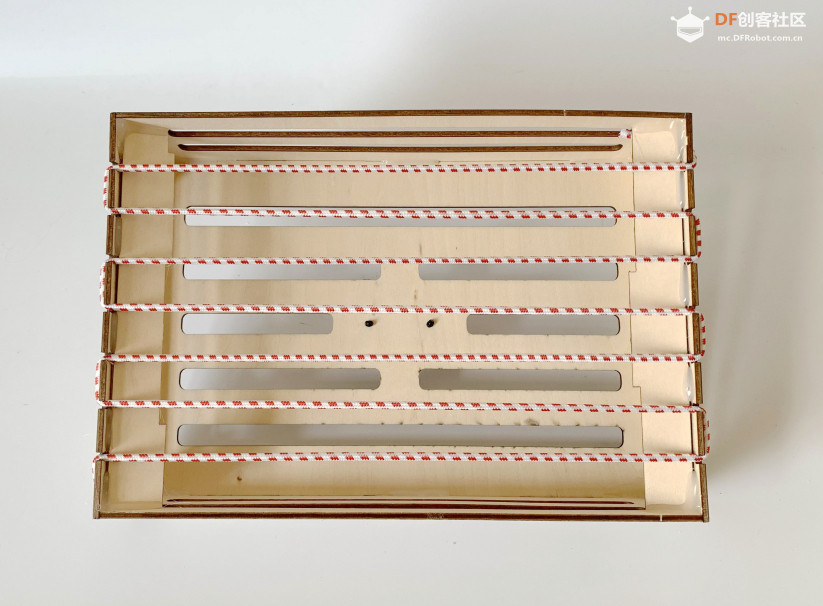 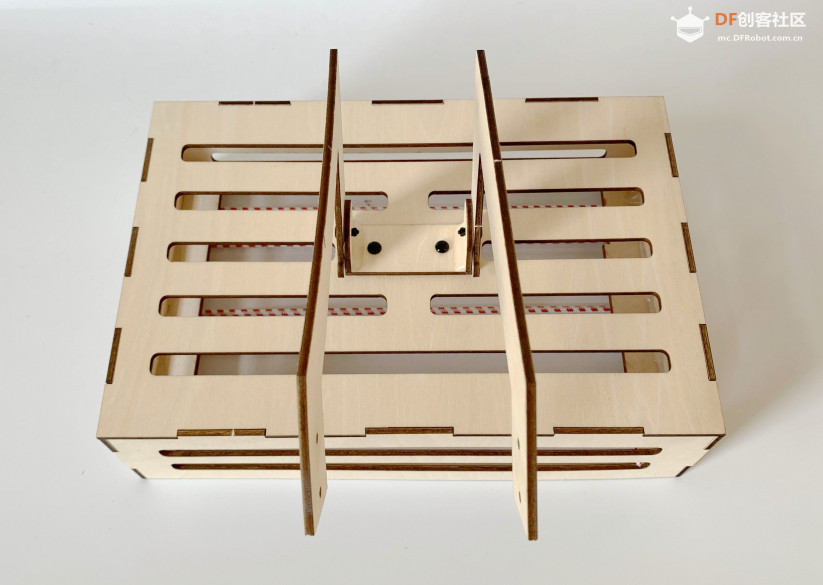 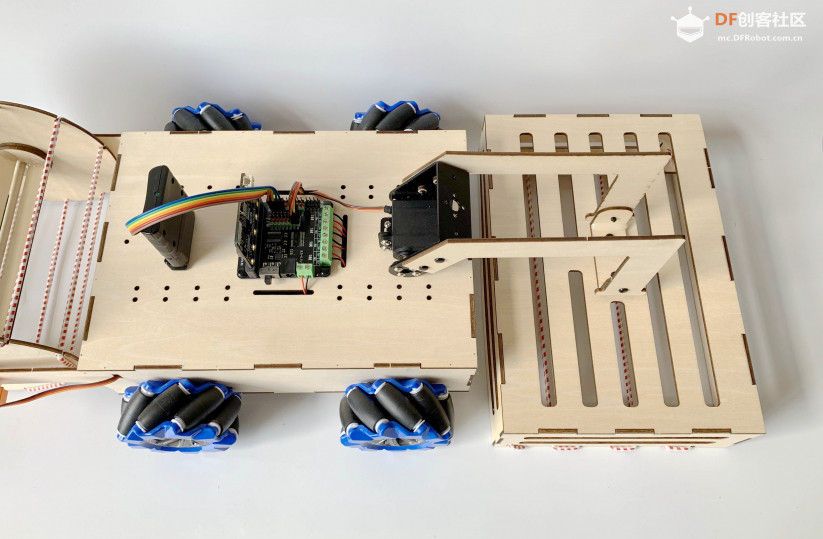 13、这样整个结构部分就安装好了,效果图如下: 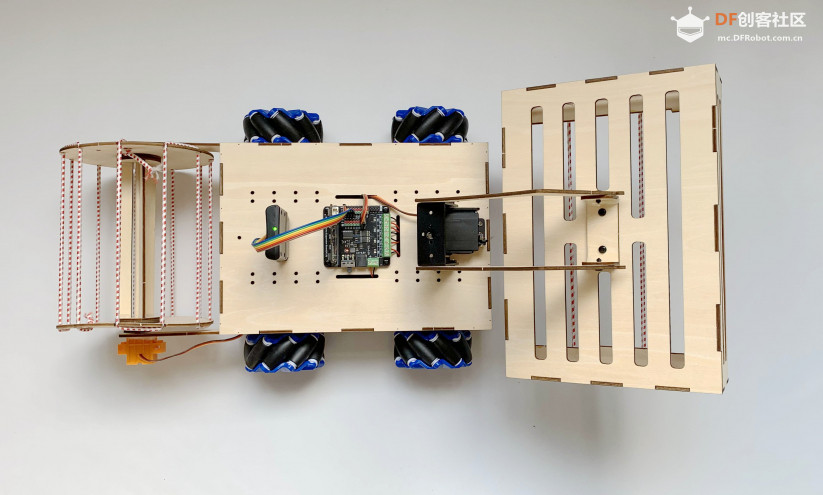 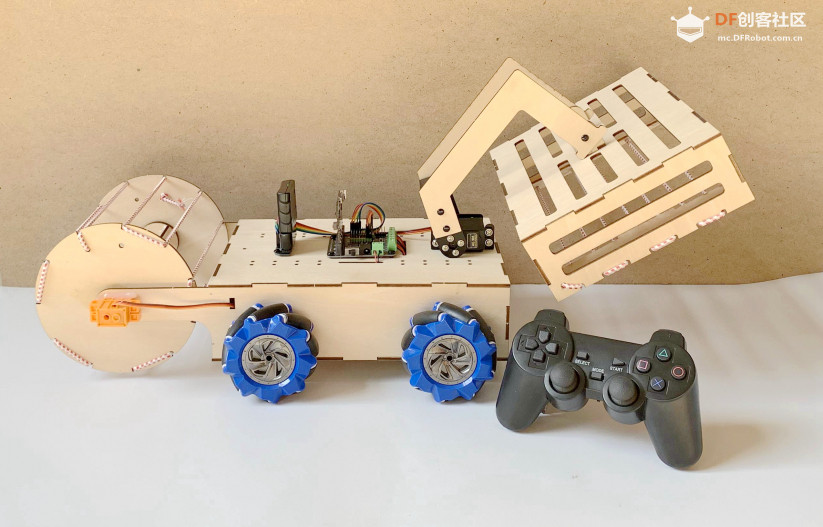 【接线图】 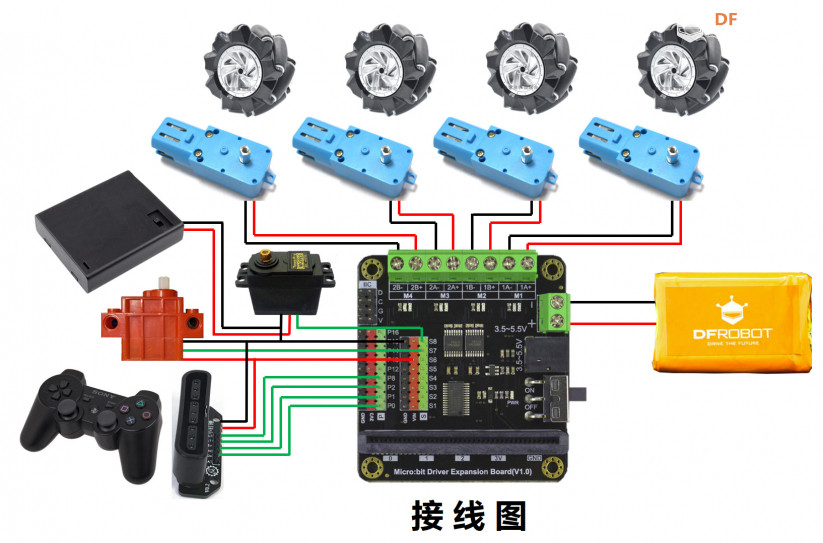 【程序编写】 1、程序的编写软件是Mind+,打开Mind+软件,切换到上传模式,接着点击拓展打开拓展. 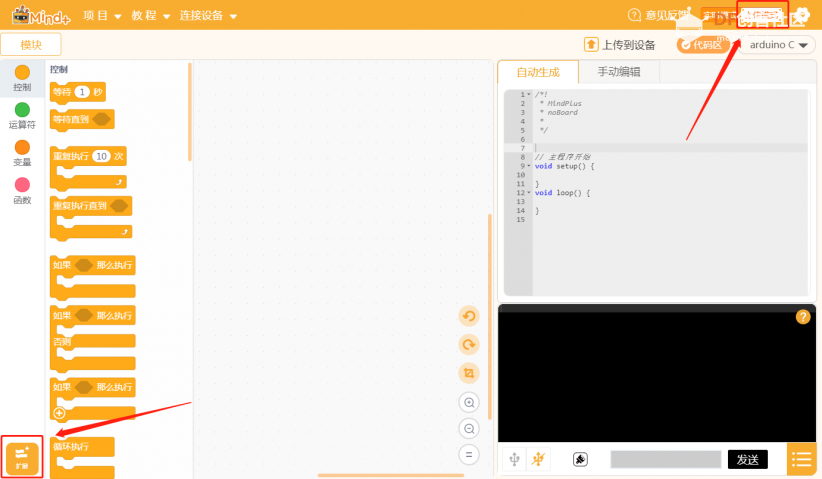 2、在主控板选项卡中选择micro:bit主控板。 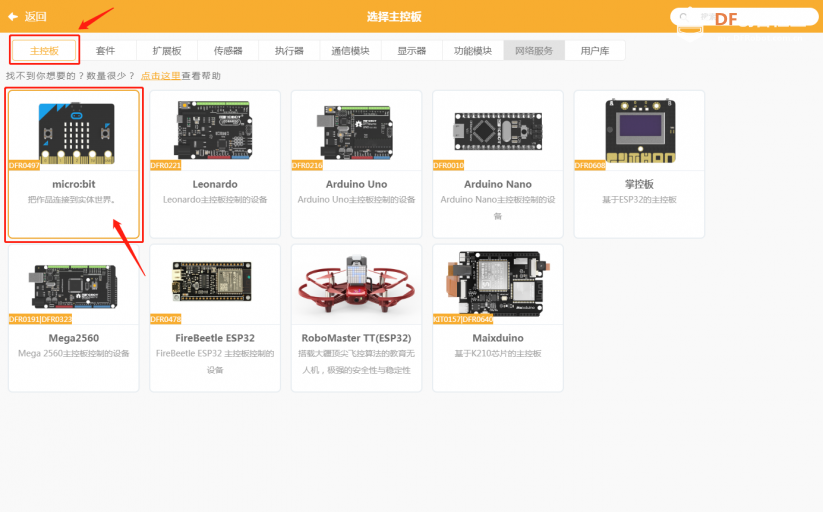 3、在扩展板选项卡中选择motor:bit扩展板。 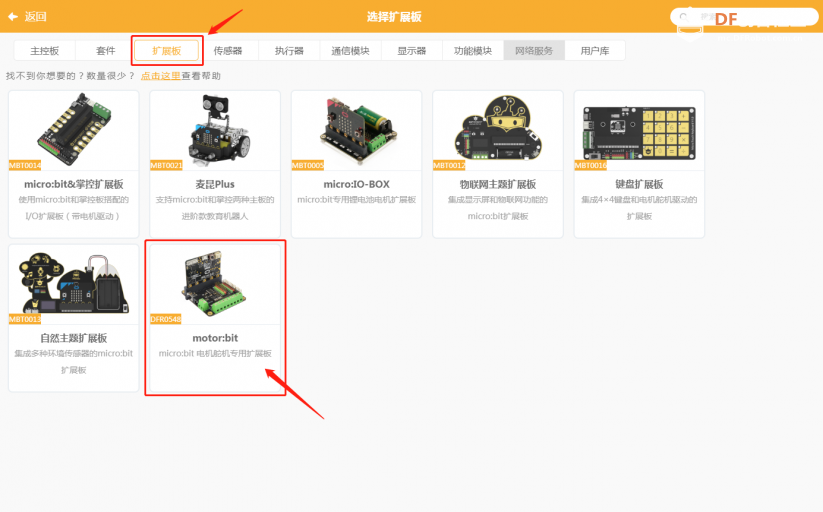 4、在执行器选项卡中选择360度微型舵机。 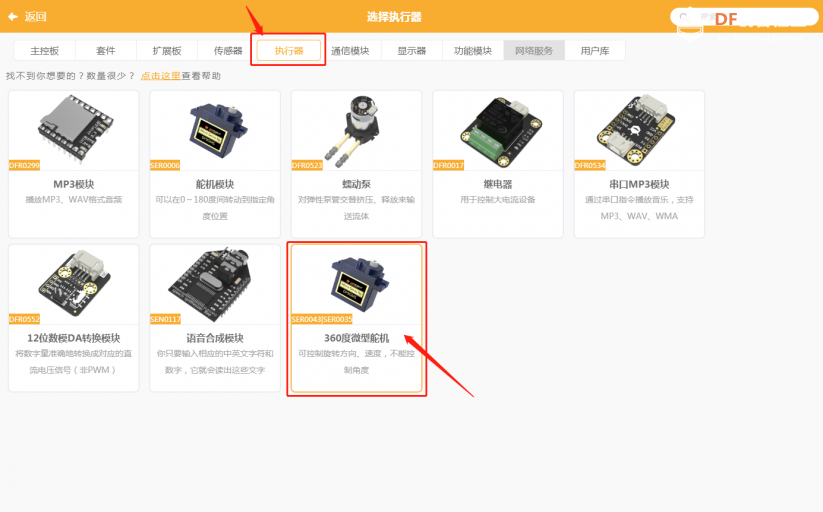 5、在通信模块选项卡中选择PS2手柄后单击返回回到编程界面。 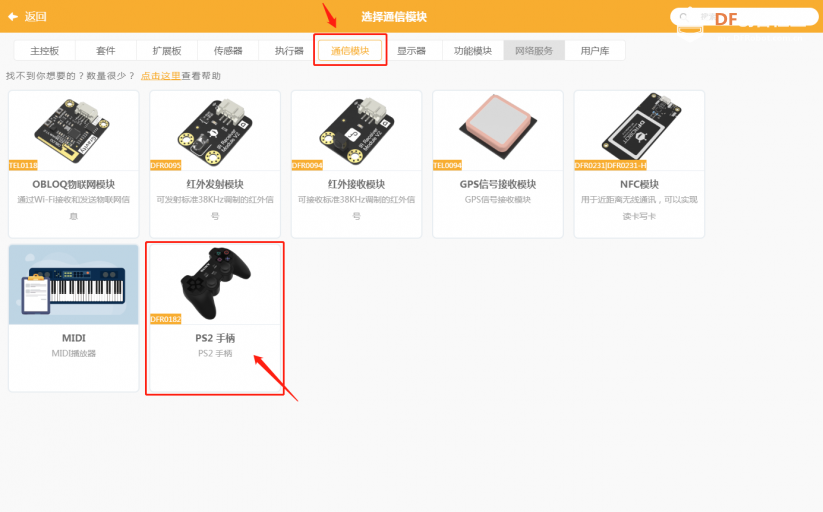 6、接下来开始正式编写程序。开始时先进行一些变量的定义及初始化设置,这一部分程序只在主控板通电后执行一次,程序如下: 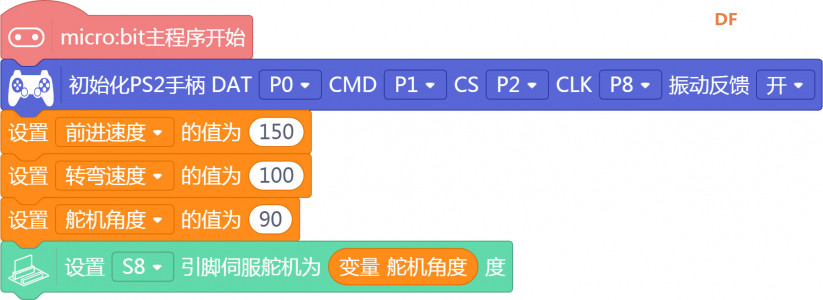 说明:程序开始时我们要对PS2手柄进行初始化设置,接口的选择根据接收器与扩展板的连接针脚相同。再自定义三个变量,分别是“前进速度”、“转弯速度”和“舵机角度”,分别设定相应的值,这个值根据实现情况可以进行调整,再把995舵机的初始角度设为变量“舵机角度”的值。 7、再自定义“前进”、“后退”、“左移”、“右移”等函数,用来控制小车的运动方向,轮子的转动方向与小车的运动方向关系如下图: 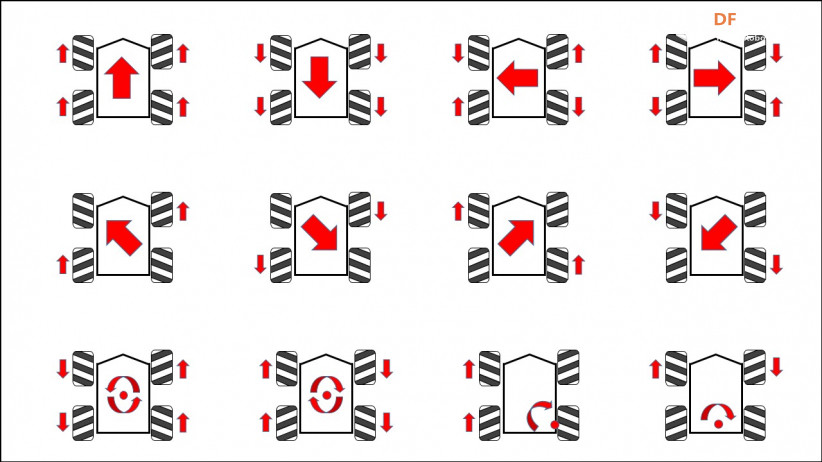 在“前进”函数中我们把四个TT电机的都设为正转,速度都为变量“前进速度”的值。  8、然后我们把“前进”函数入在循环执行积木块中,上传到主控板进行测试,如果四个轮子都是向前转动的就可以了,如果哪个轮子向后转动,我们就把这个电机与扩展板连接的正负极两根线调换一下,那它就会朝反方向转动,也就是变成向前转动了。程序如下: 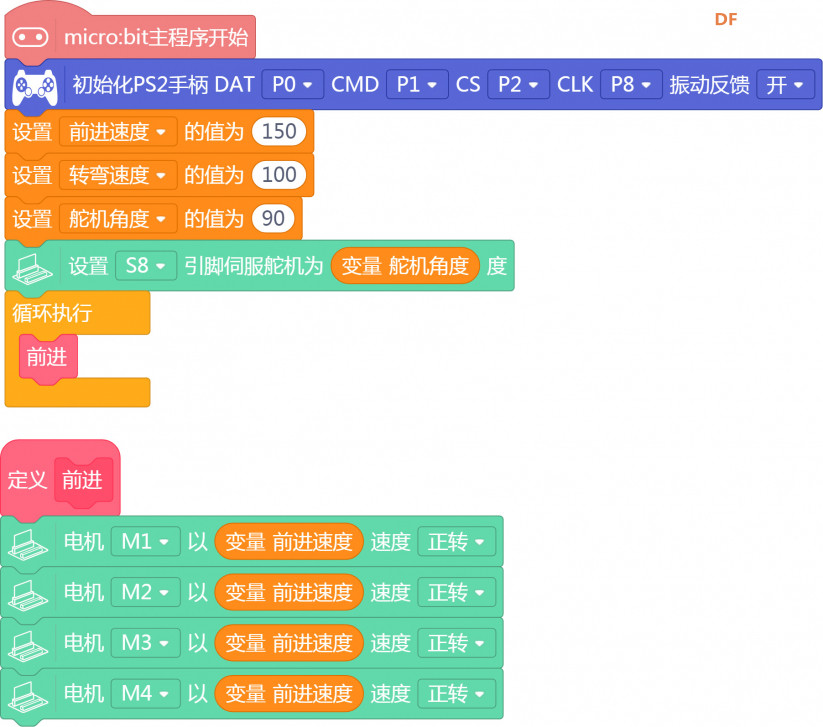 9、我们再根据轮子的转动方向与小车的运动方向关系图编写好“后退”、“左移”、“左转”等函数的程序。  10、在编写PS2手柄控制小车进,我们可以先利用串口打印的形式读取PS2手柄上两个摇杆在不同位置时X和Y的值,然后再在程序中编写相应的条件指令,在这里我们用右侧的摇杆控制小车的前进、后退、左移和右移,用左侧的摇杆控制小车的左转和右转,用左侧的方向键控制小车的向左前方进行、左后方倒退、右前方进行和右后方倒退,用三角形按键使360度舵机转动起来,用方形键让360度舵机停止转动,用圆形键让180度舵机先转到10度,等待1秒后再转回到90度。程序如下: 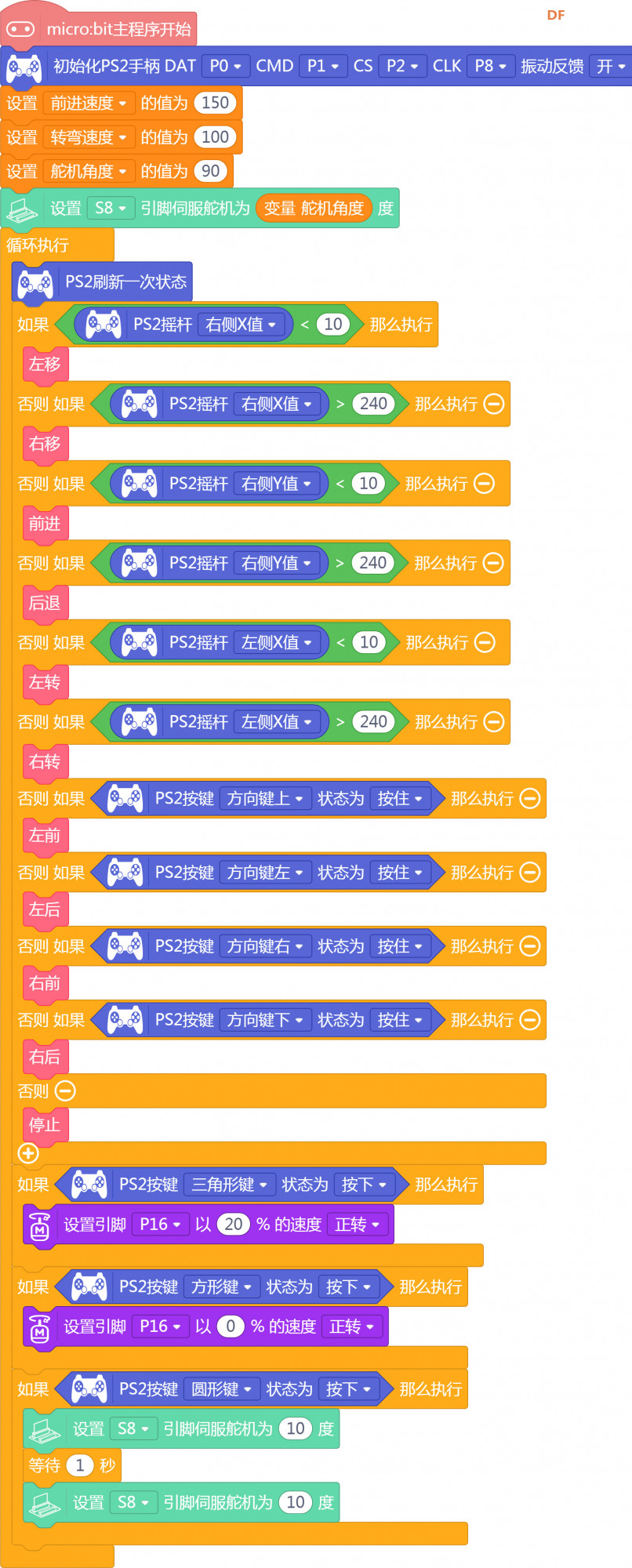 11、在上面的程序中,程序最后的180度舵机的角度变换是比较快速的,看起来也很生硬,这样对舵机也不是很好,所以我们可以把180度舵机的程序改以修改,使之在角度变换时看来顺滑一点。修改程序如下:  12、所有程序写好了,我们上传测试,根据实际情况修改“前进速度”、“转弯速度”和“舵机角度”三个变量的值以及360度舵机旋转的速度和180度舵机的运行角度。最终程序如下: 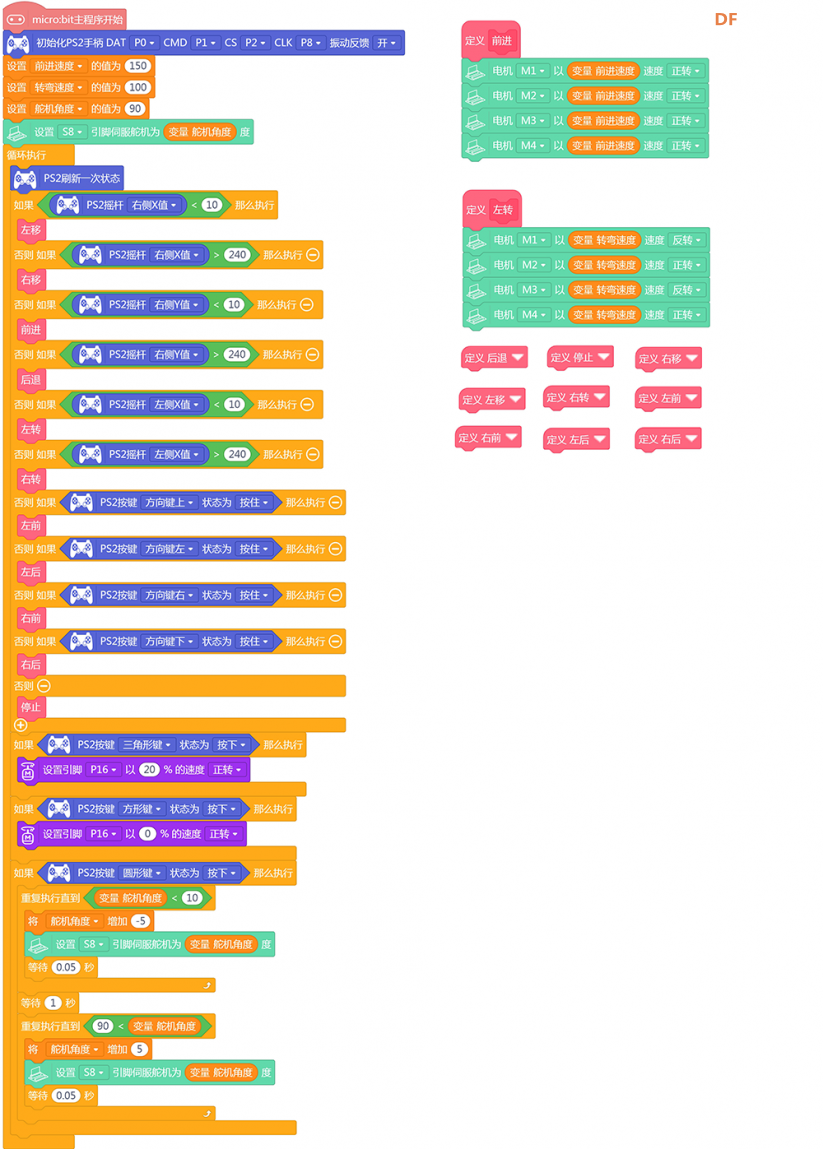 【项目拓展】 在完成这个遥控捡球机器人的项目后,经过测试,捡拾乒乓球的效果还是很不错的,但是不是最优的方案呢,大家可以打开自己的脑洞,设计一些其它的捡拾装置,比较一下其效果,我们也可以对捡拾的装置进行更改,把它变成能捡拾网球或都变成一台扫地机器人等。接下来我打算加上二哈识图(HuskyLens)AI 视觉传感器等,把改装成一台不用人控制的AI自动捡球机器人。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






