|
16123| 7
|
再也不怕找不到空车位了——空车位引导系统 |

|
本帖最后由 章 于 2024-12-5 09:37 编辑 【视频演示】 【项目背景】 在生活水平日益提高的今天,汽车成了人们必备的交通工具。在日常生活中,我们经常会去一些商场、超市、公园等公共场所,停车就成了一个很大的问题。当我们的车子开进一个停车场时,我们很难精准地找到停车位,全凭运气在停车场里转悠,这样一来,给我们停车带来了极大的不便,为了指引人们快速、精准地在停车场里找到空余车位,解决人们停车难的问题,于是就设计了这个“空车位引导系统”。 【功能介绍】 1、数码管能显示车库空余车位的数量,它的数字随着空余车位的情况实时更改。 2、当红外避障模块检测到入口有汽车开进时,如果里面有空车位,闸门就会自动打开,如果没有空车位,闸门不会打开。同样出口处红外避障传感器检测到有车时,闸门也会自动打开。 3、当汽车开进车库后,地上的灯带会自动开始亮起,哪里有空车位,灯带就亮到哪里,这样可以指引汽车行驶到空车位上。当汽车停好后,灯带自动熄灭,达到节能的目的。 4、当发生火灾或有害气体浓度超过一定值时,蜂鸣器就会响起来,地上的灯带也会闪烁,起到报警的作用,同时风扇自动打开进行通风,车库的进出口闸门也会自动打开,方便安全疏散。 【硬件清单】
【设计组装】 1、外观结构设计与切割 外观结构的材料采用3MM的椴木板,根据硬件组装的需求及作品外观的设想,先利用LaserMaker软件在电脑上设计出其外壳图纸,再用激光切割机切割出来。外观结构设计图如图1所示: 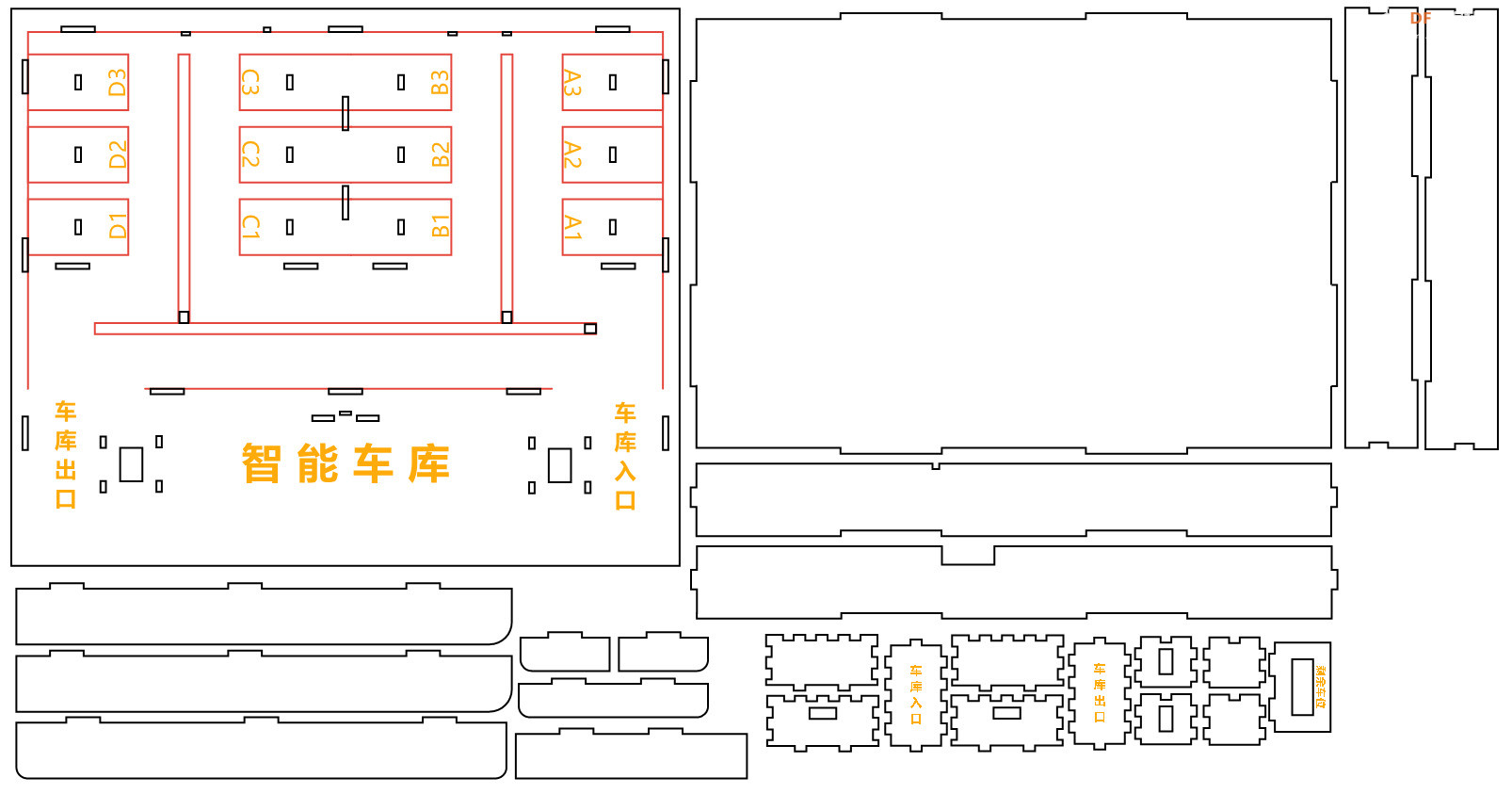 图1 外观结构设计图 2、所顶部面板和四周侧面板组装好,用白胶和螺丝固定,如图2所示:  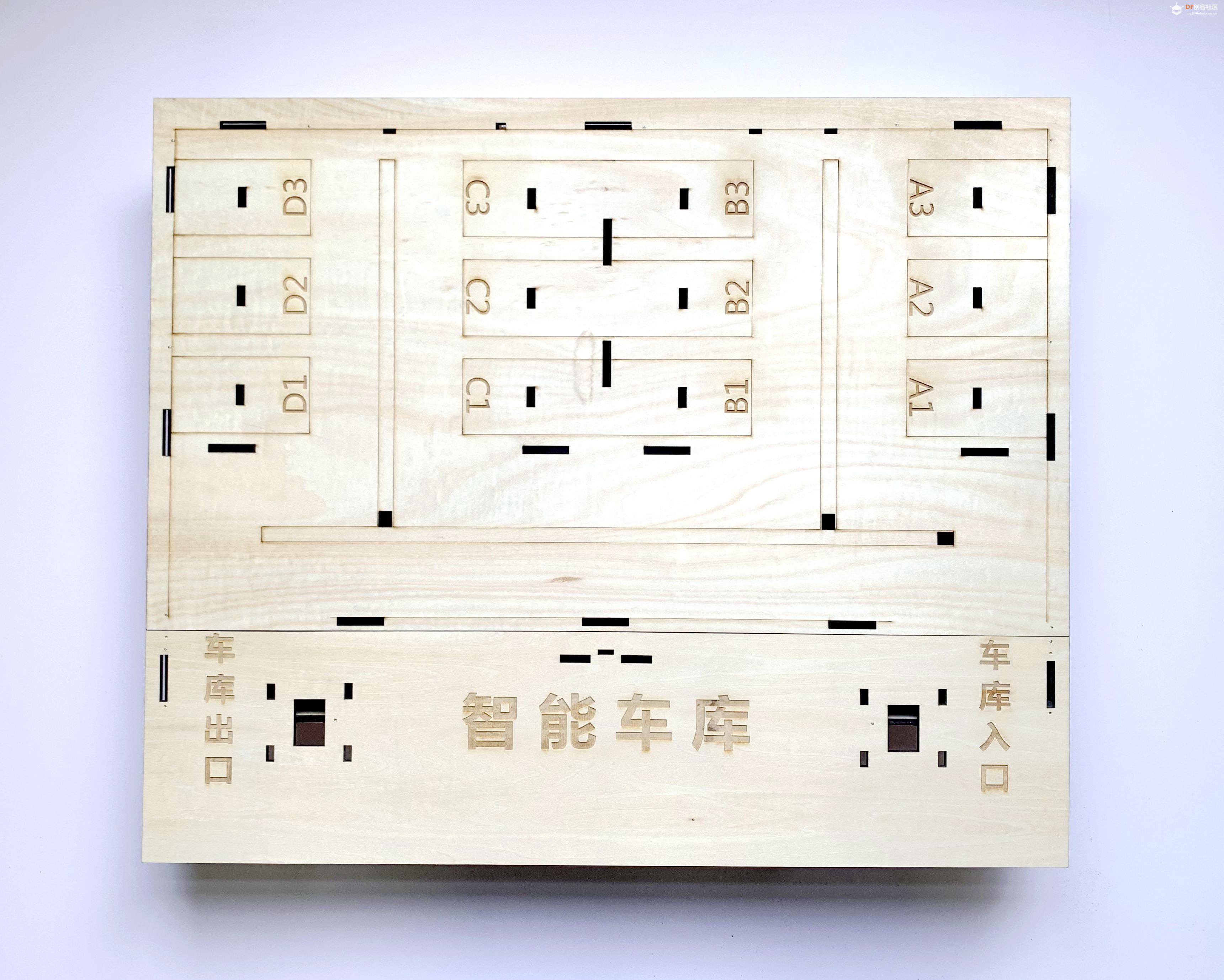 图2 组装底板和侧面板 3、安装数码管,用热熔胶固定。如图3所示: 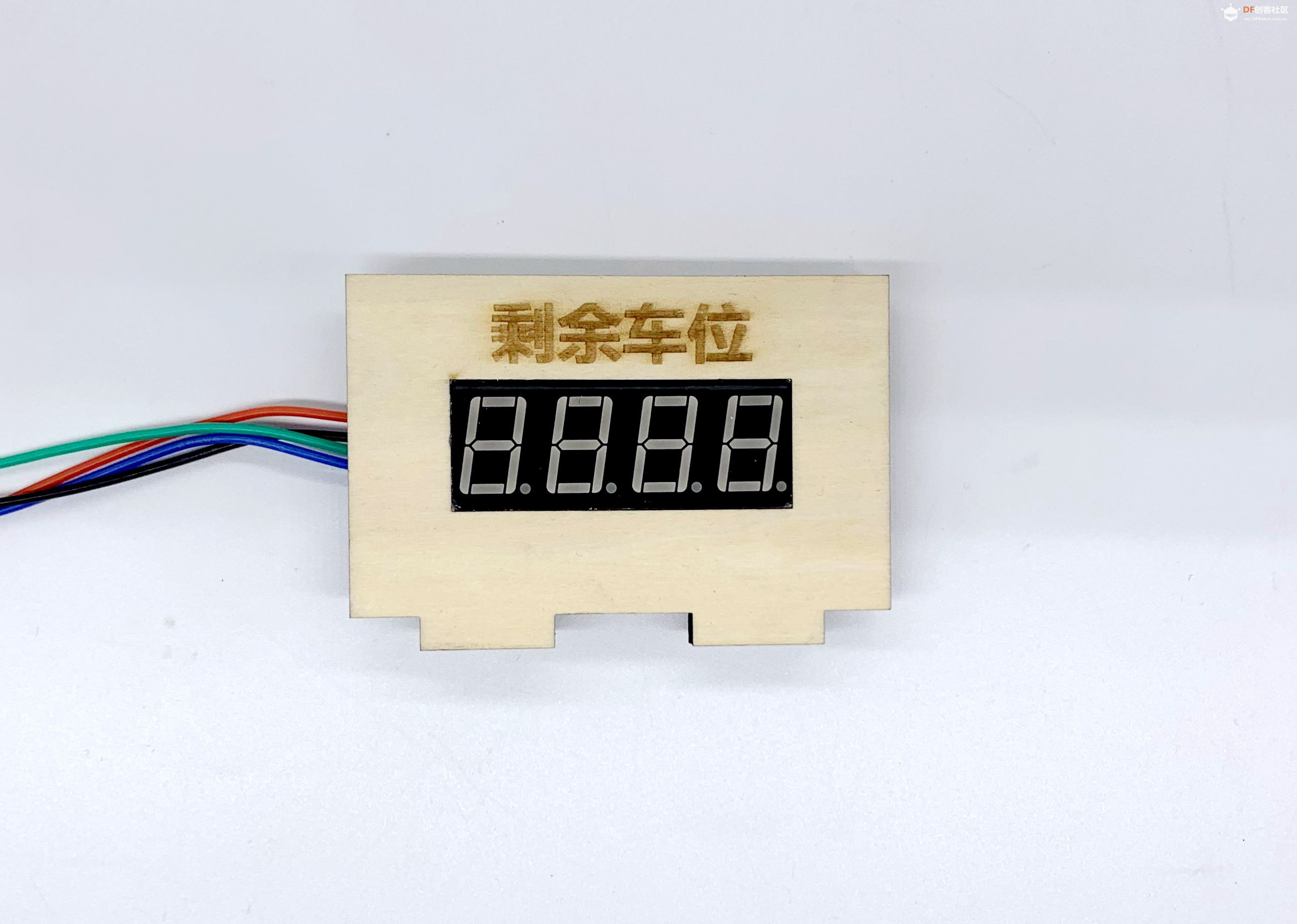 图3 安装数码管 4、把入口处的舵机、红外避障传感器固定在相应的位置上。如图4所示: 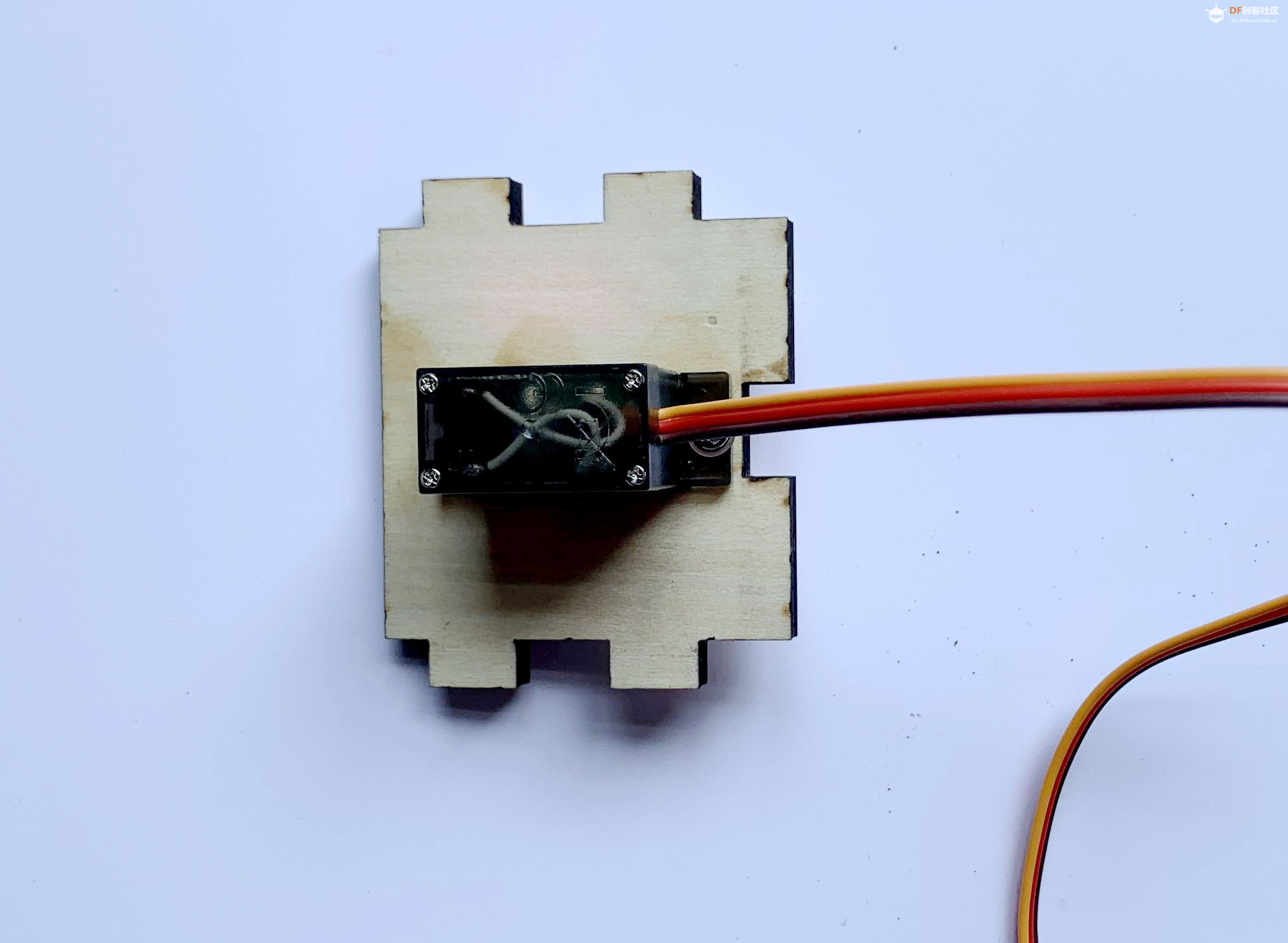 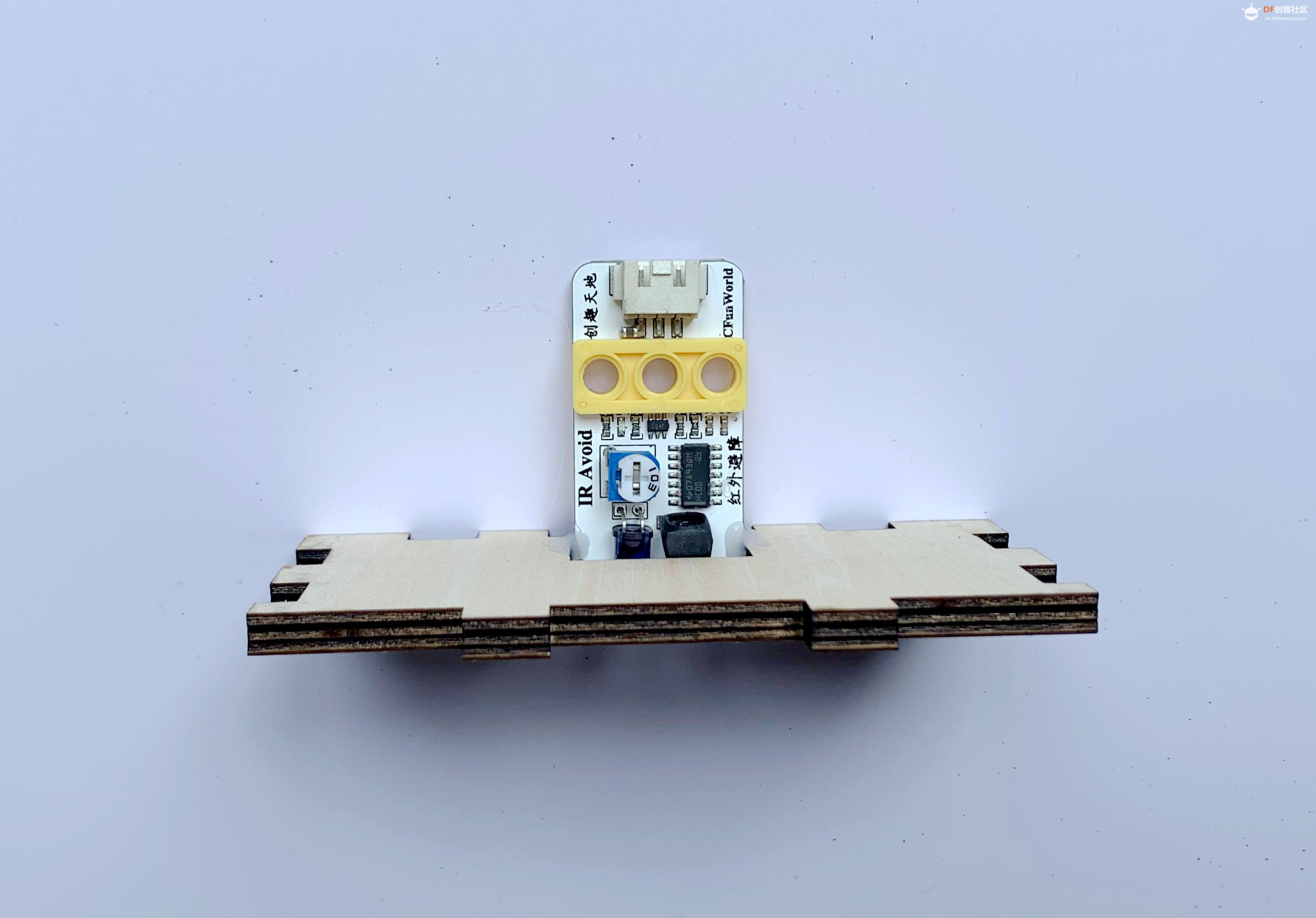 图4 安装舵机和红外避障传感器 5、把相关的面板组装在一起,这样车库入口组件就组装好了。如图5所示: 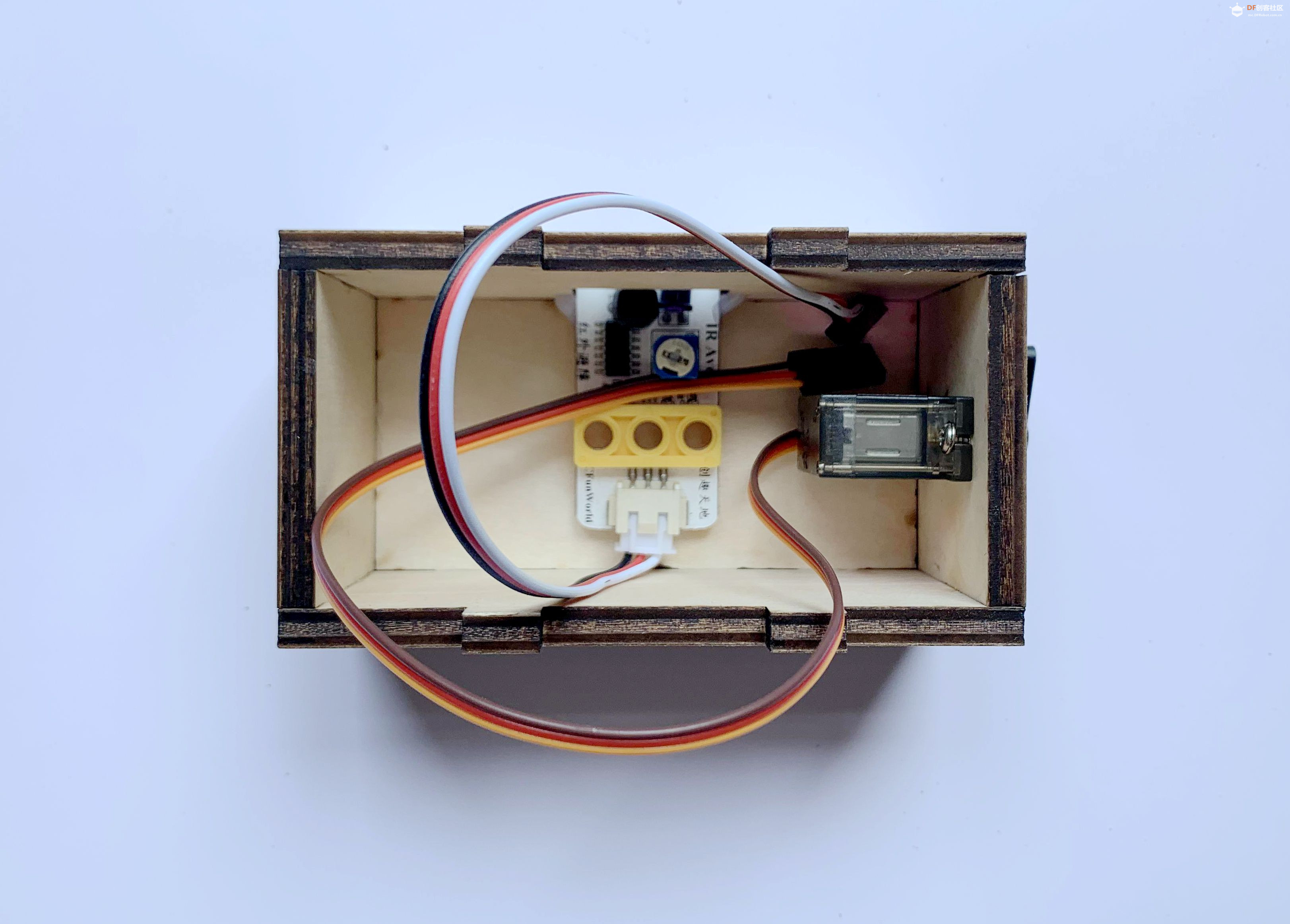  图5 组装入口组件 6、用同样的方法把出口处也组装好。如图6所示: 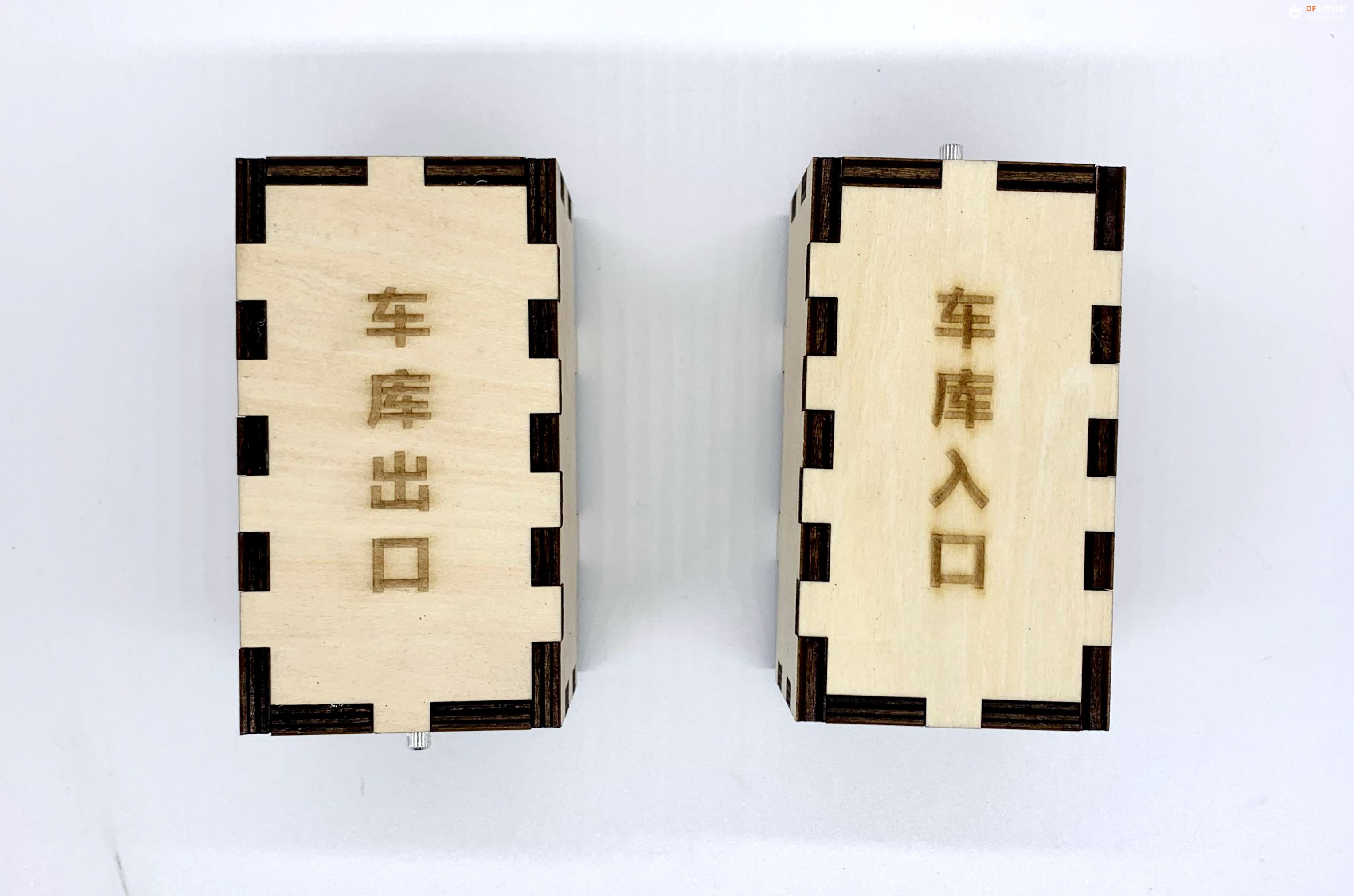 图6 组装出口组件 7、把6个红外避障传感器用热熔胶固定在上面板背面相应的位置上。如图7所示:  图7 安装红外避障传感器 8、把有害气体传感器、风扇、蜂鸣器和火焰传感器固定在后挡板的相应位置上。如图8所示: 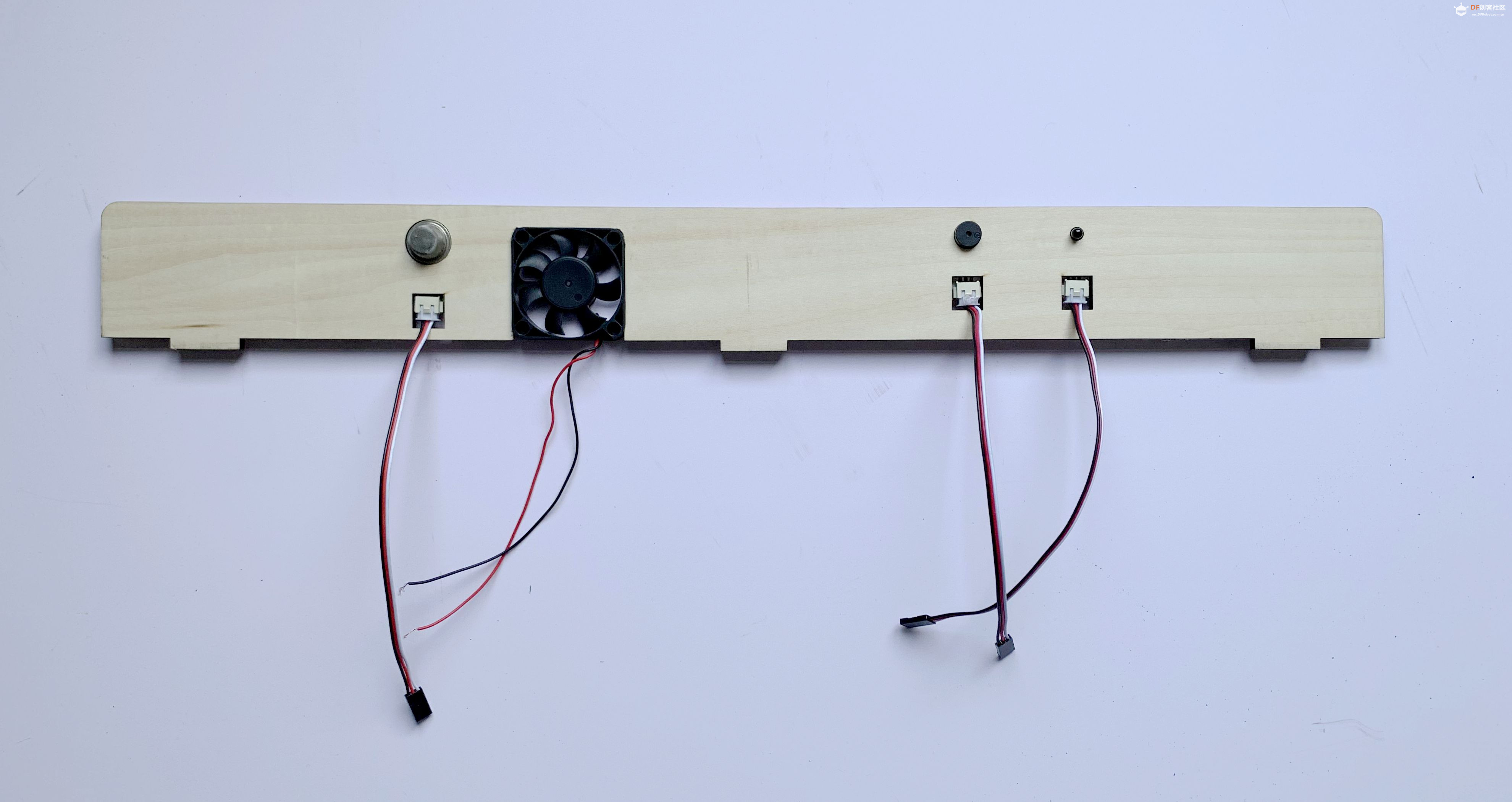 图8 安装火焰、气体等传感器 9、把数码管部分、出入口部分以及各个挡板安装在顶部面板上,这里可以用白胶或401胶水固定。如图9所示: 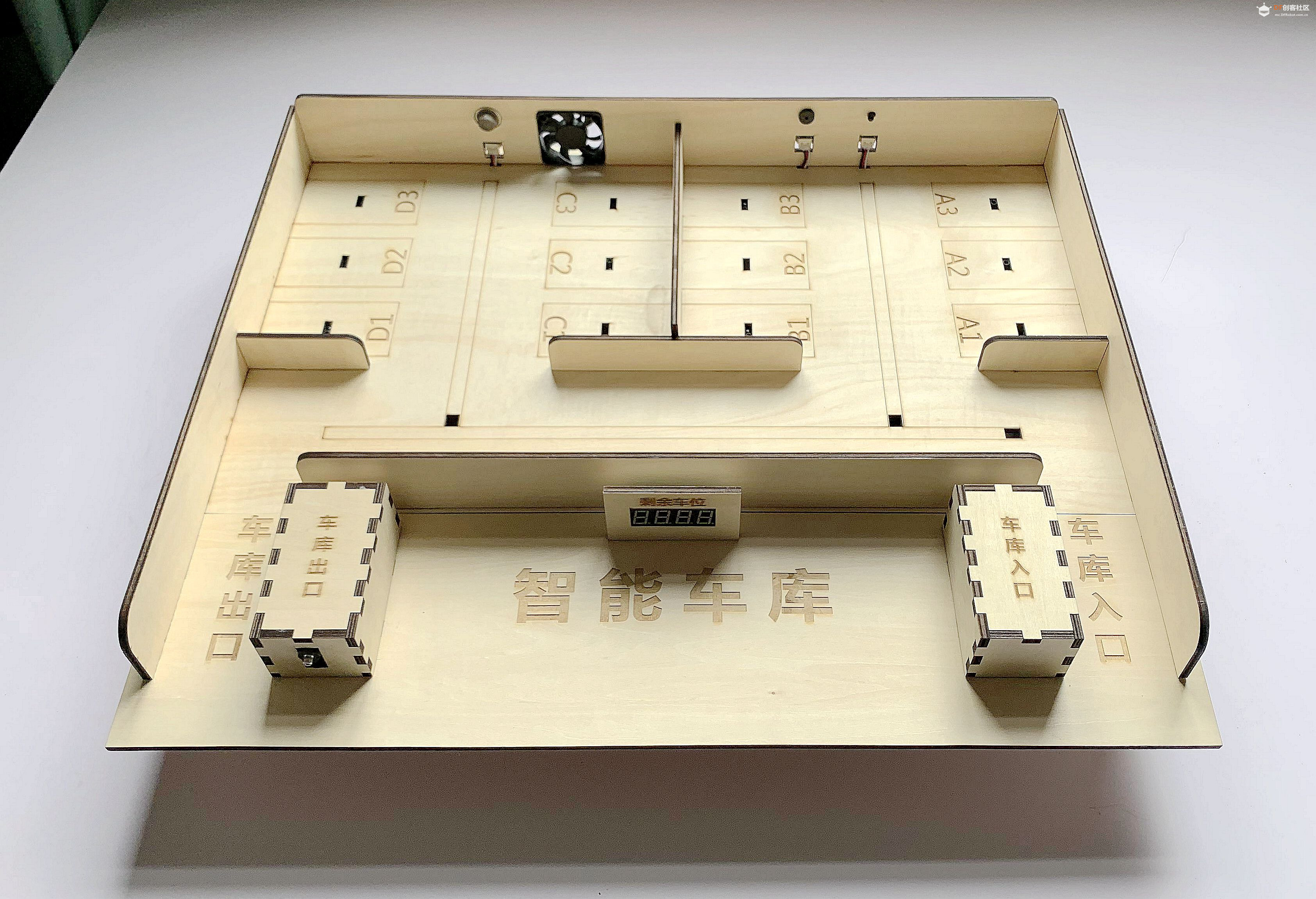 图9 组装各部分挡板及数码管部分 10、把三条灯带固定在顶部面板相应的位置上。如图10所示: 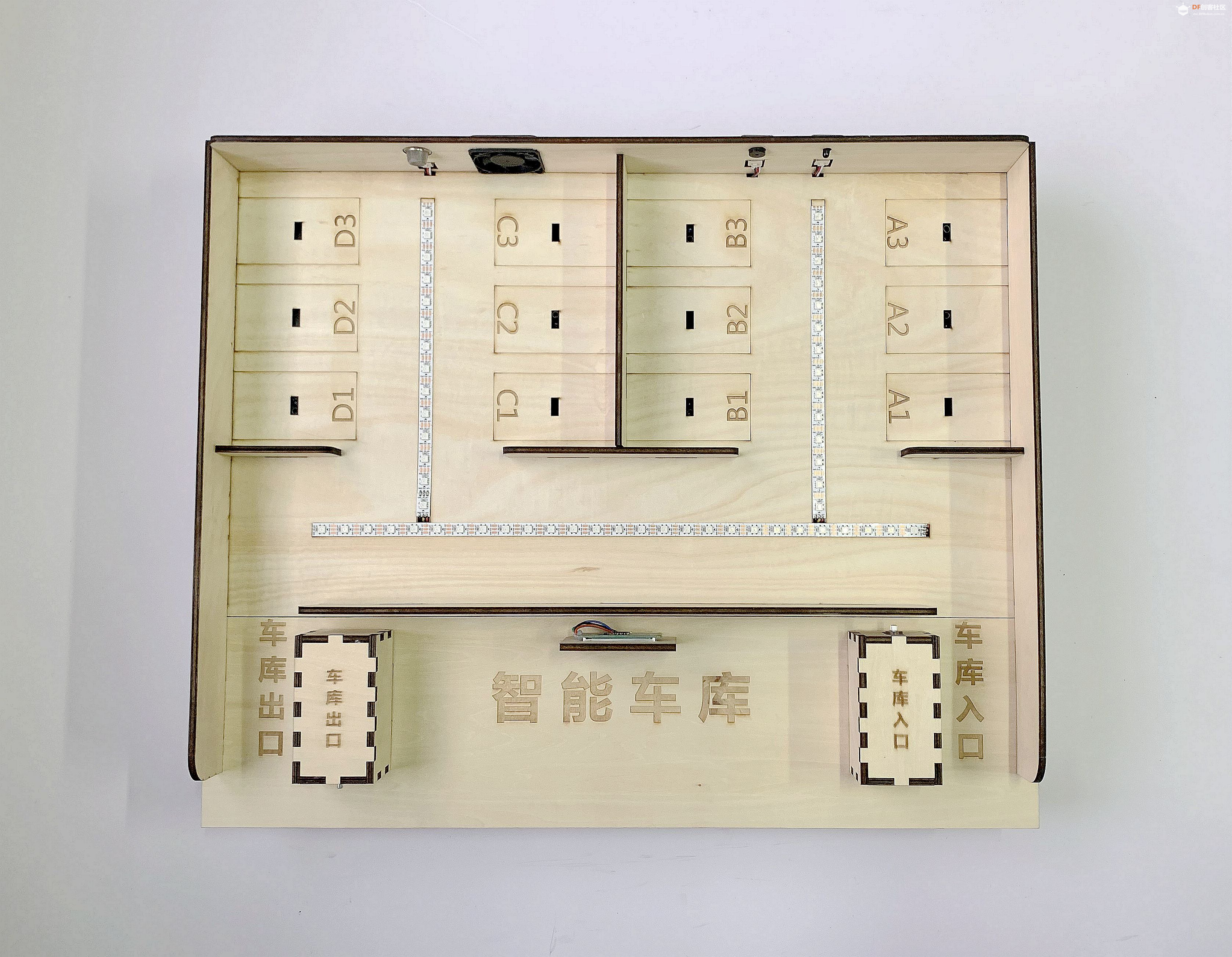 图10 安装灯带 11、把各个传感器根据接线图所示与主控板进行连接。如图11所示: 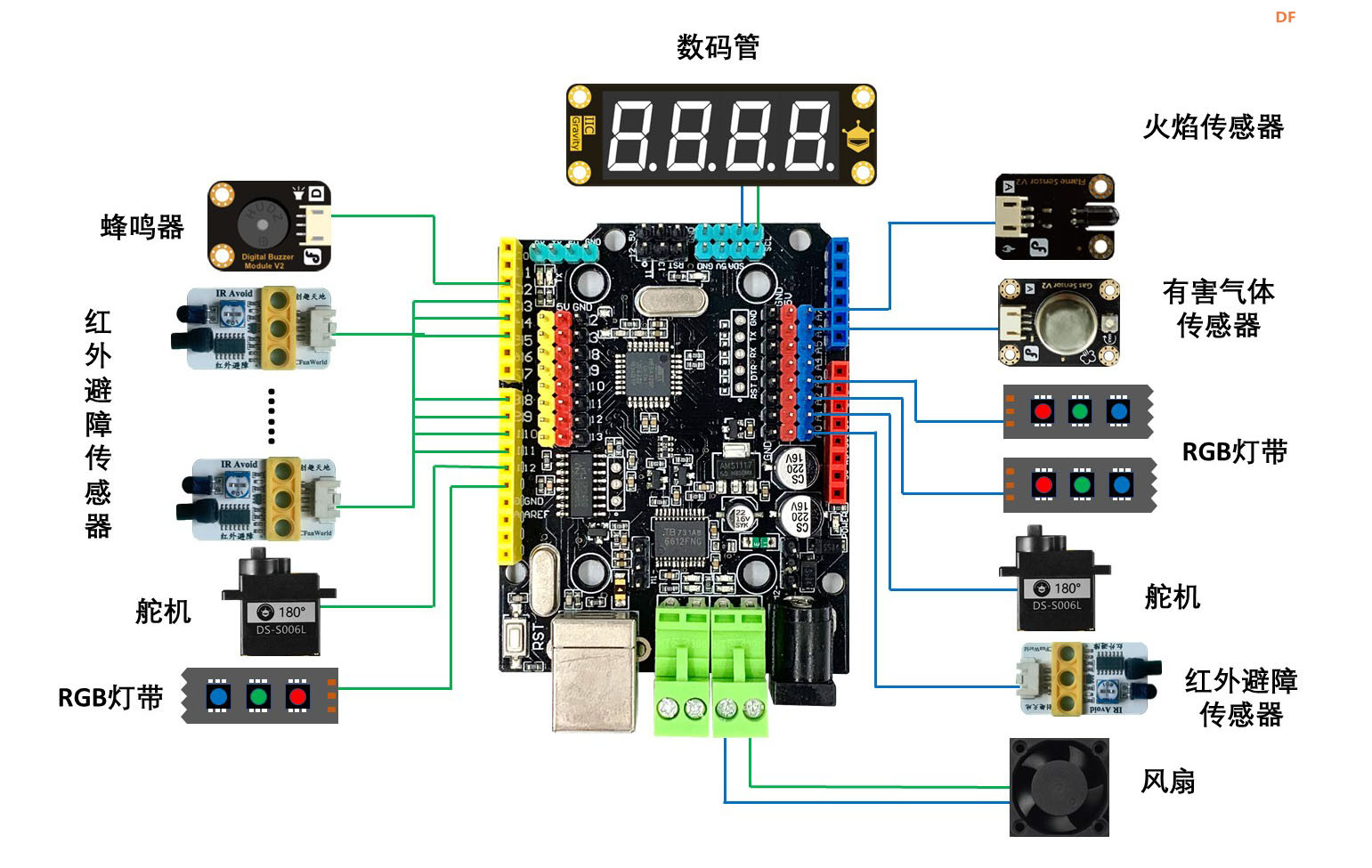 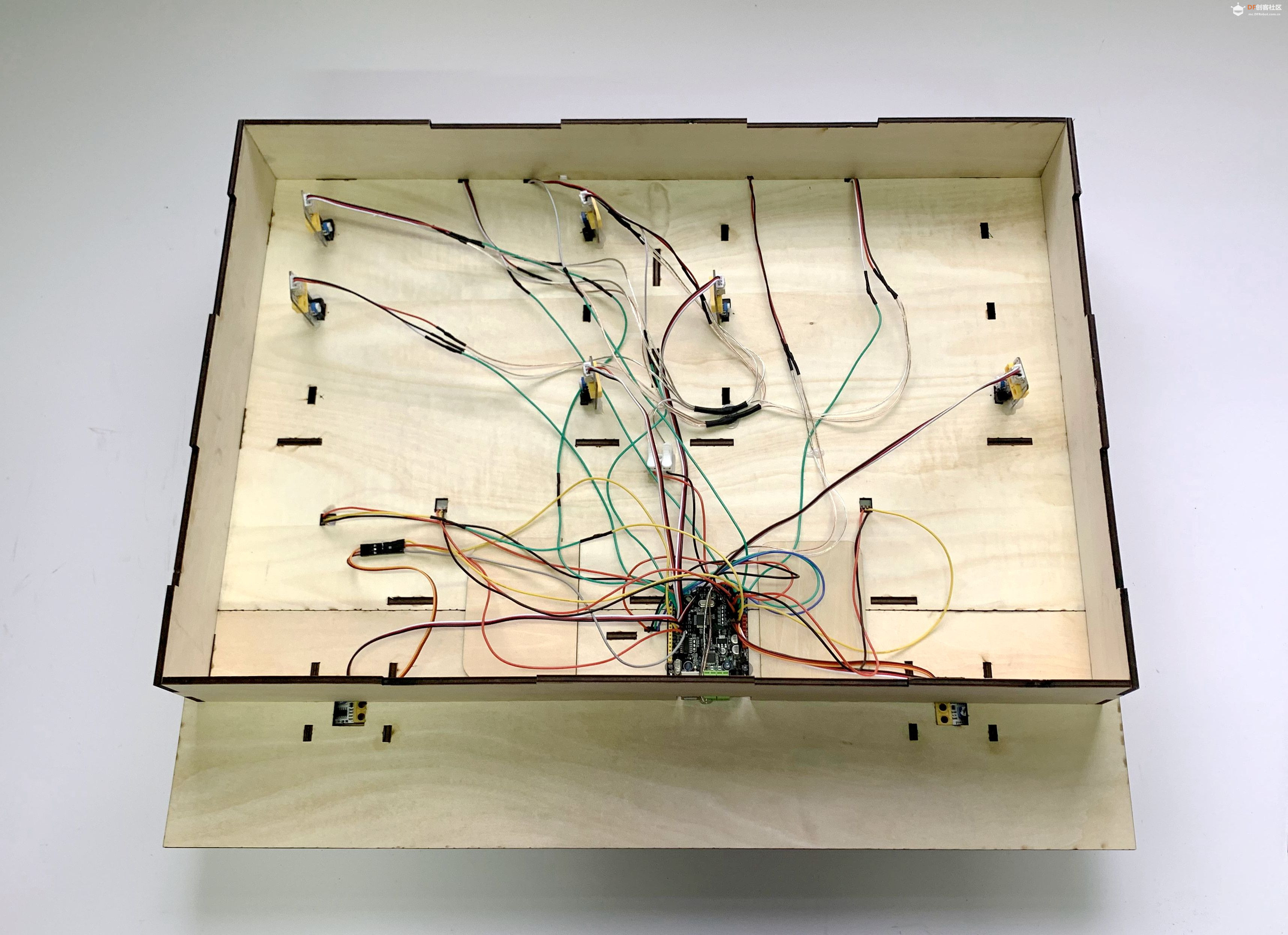 图11 电路接线图 12、最后安装上底板及固定一部分小车,这样结构部分就组装完成了。如图12所示: 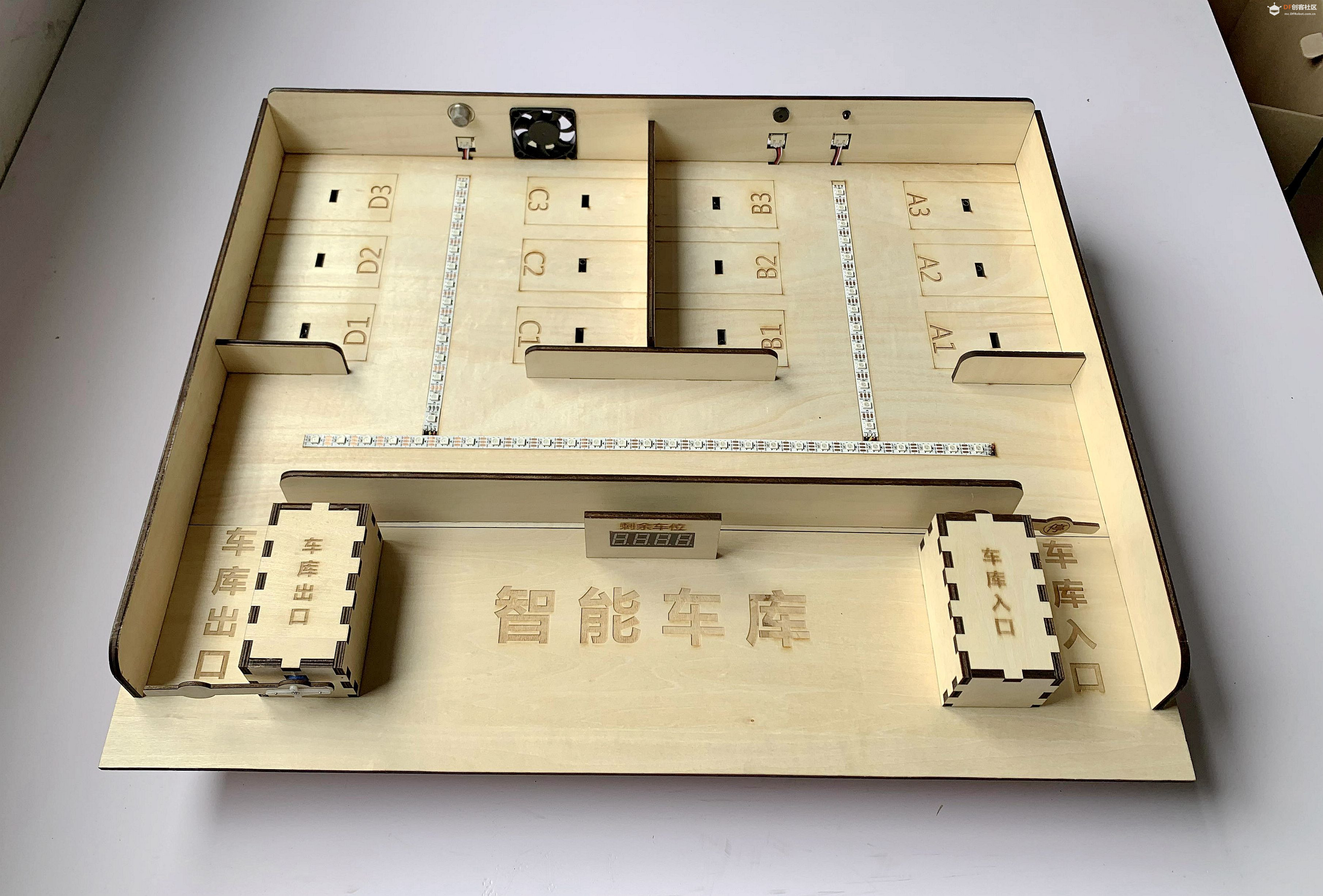 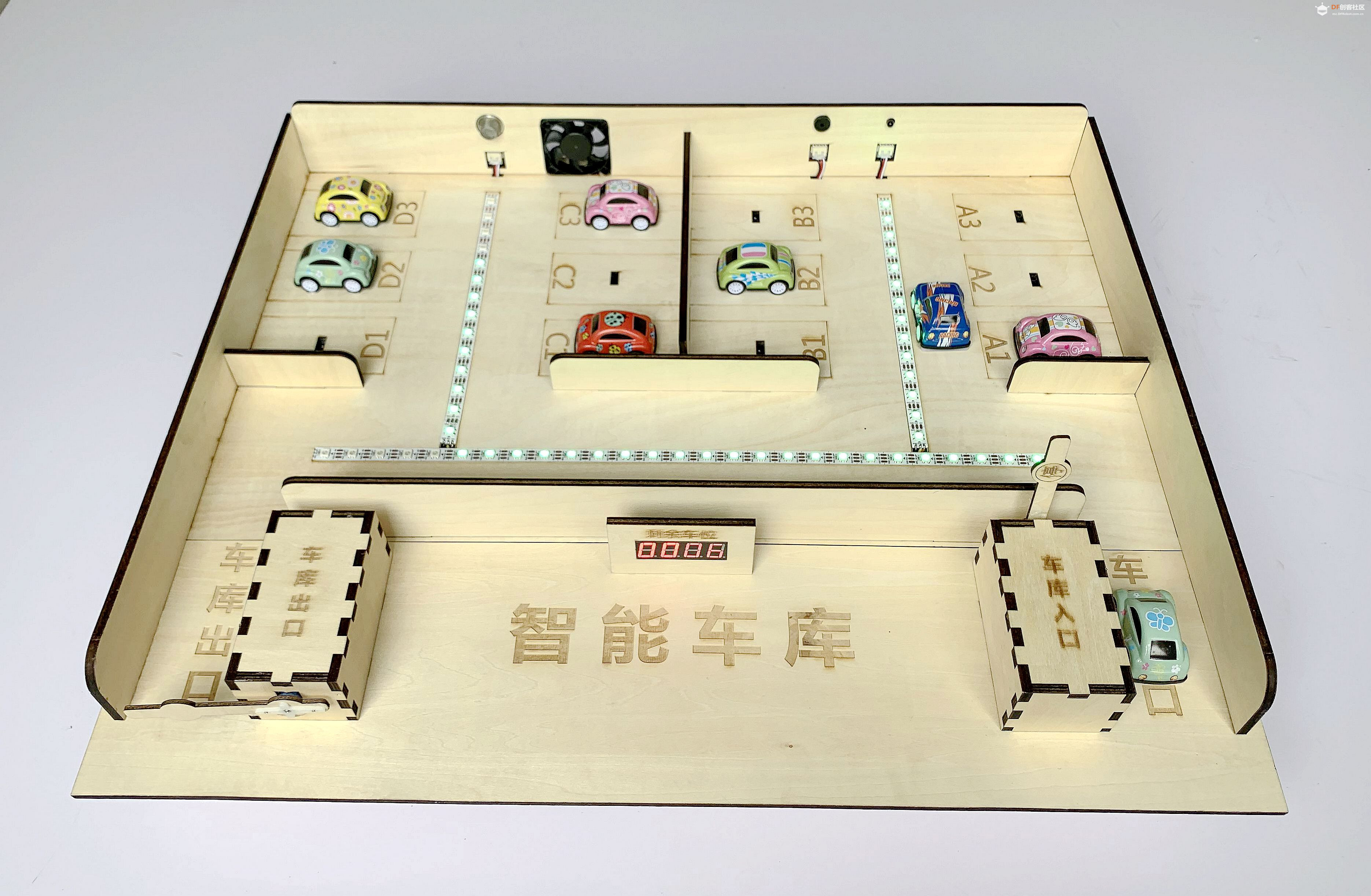 图12 组装完成图 【程序编写】 1、程序的编写软件是Mind+,打开Mind+软件,切换到上传模式。如图13所示: 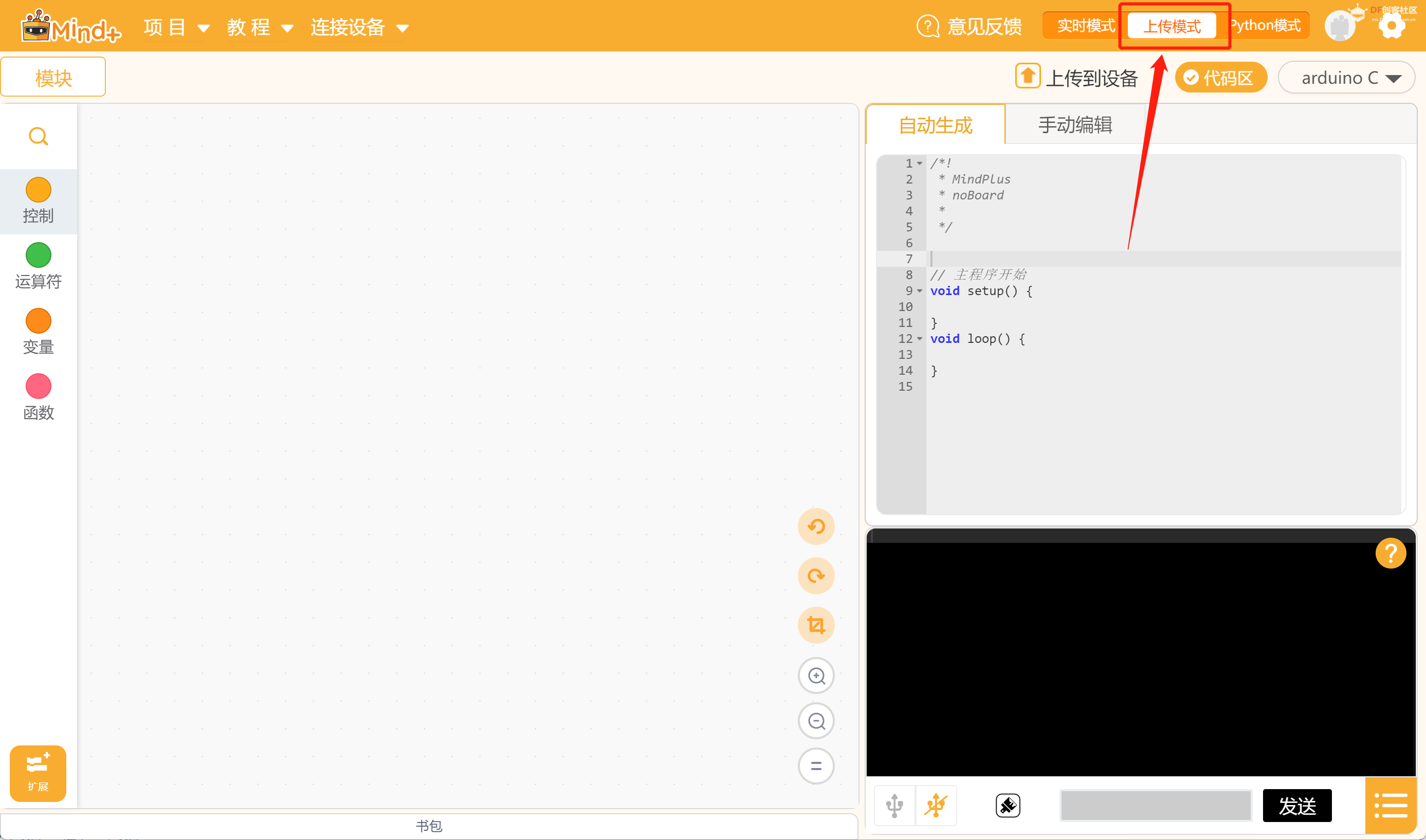 图13 切换到上传模式 2、我们先选择相应的主控板和传感器、执行器。点击左下角的“扩展”,在弹出窗口的“主控板”选项卡中选择“Arduino UNO”,在“执行器”选项卡中选择“舵机模块”、在“显示器”选项卡中选择“WS2812 RGB灯”和“TM1650四位数码管”,最后点击“返回”回到编程主界面。如图14、图15、图16、图17所示: 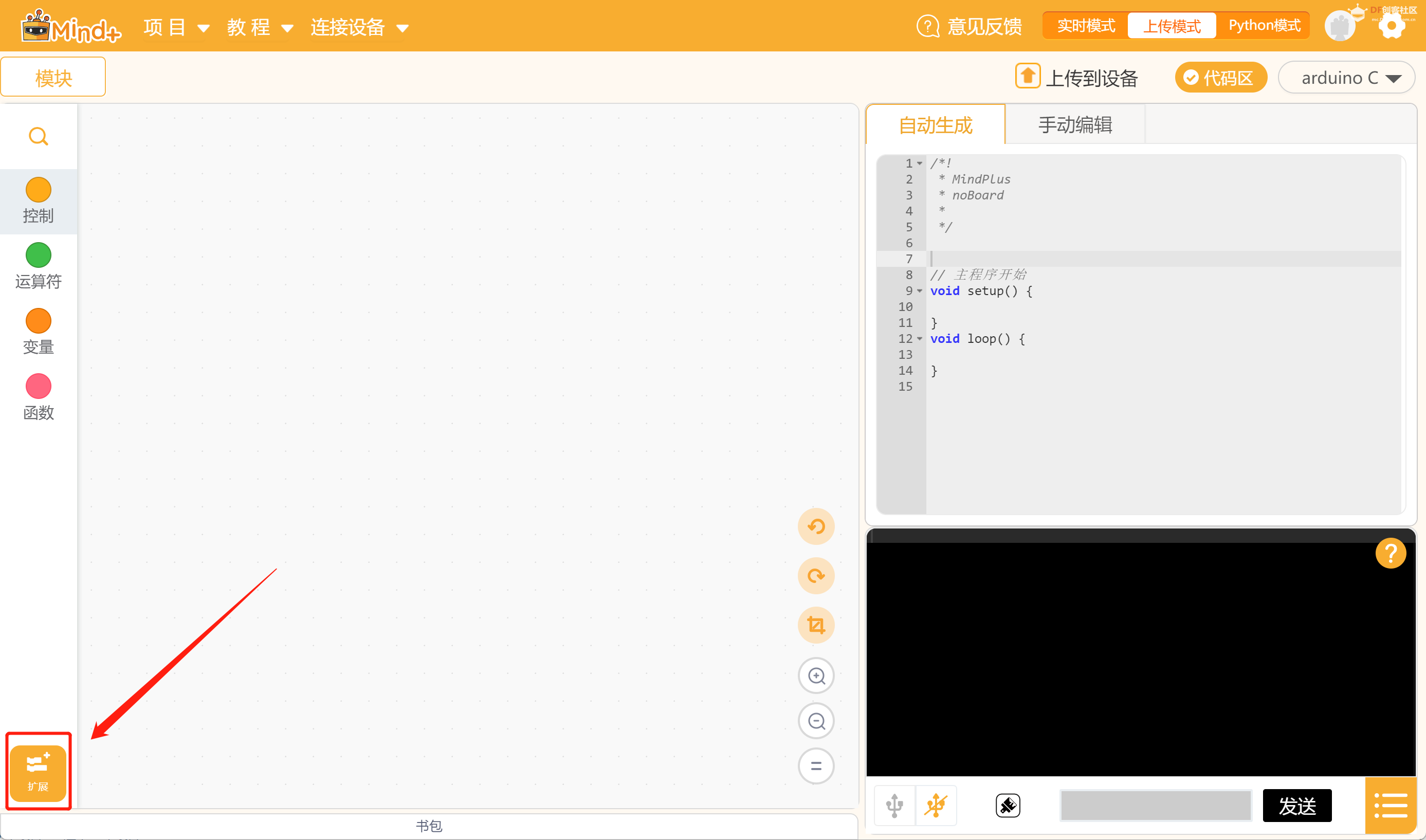 图14 添加“扩展”  图15 添加“Arduino Uno”主控板  图16 添加“舵机”  图17 添加“WS2812 RGB灯”和“TM1650四位数码管” 3、新建一个“初始化”函数把它接到主程序下,“初始化”函数中对灯带、舵机角度、数码管进行一些设置。在左侧的显示器、函数、执行器、变量类别中拖出相关的积木,并对它们进行设置。灯带分为三条,分别接在13、A2、A3引脚上,所以更改相应的引脚,并设置相应的灯珠数,再把它们的亮度设为50,免得灯光太刺眼,并让它们全部熄灭。再初始化一下数码管,接着新建两个变量“入口舵机角度”和“出口舵机角度”,值分别为140和150,并把入口和出口的舵机的角度用这两个变量代替,这个角度刚好是道闸关闭的角度。程序如图18所示: 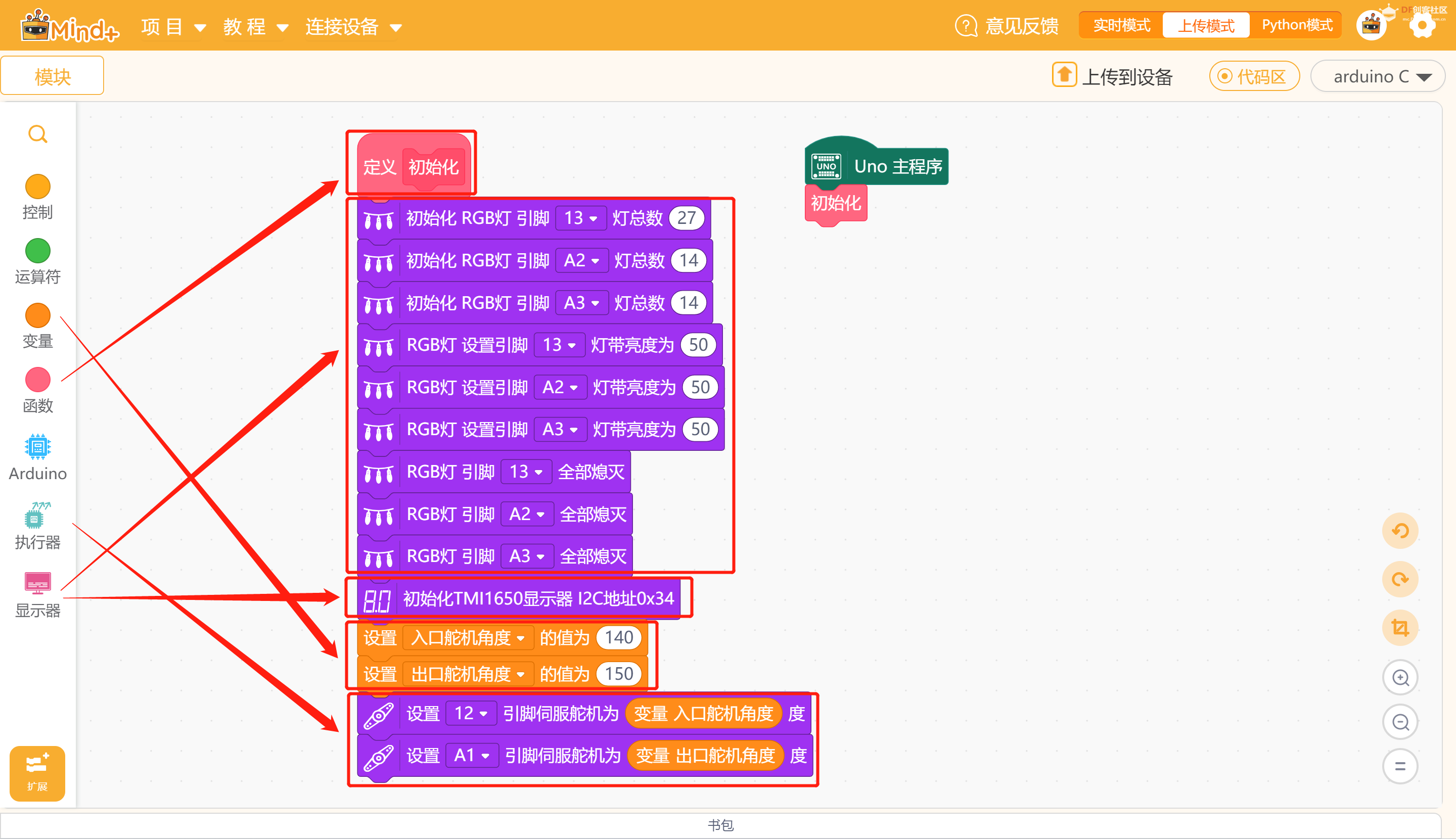 图18 初始化程序 4、停车场里的空车位随时会发生变化的,所以我们要随时统计空车位的数量,这时我们可以新建一个“空车位计算”函数,并把它放到主程序的循环执行中。空车位的计算是通过安装在车位上红外壁障传感器来识别画位上有没有车,从而计算了剩余车位,并让它在数码管上显示出来。程序有说明如图19所示: 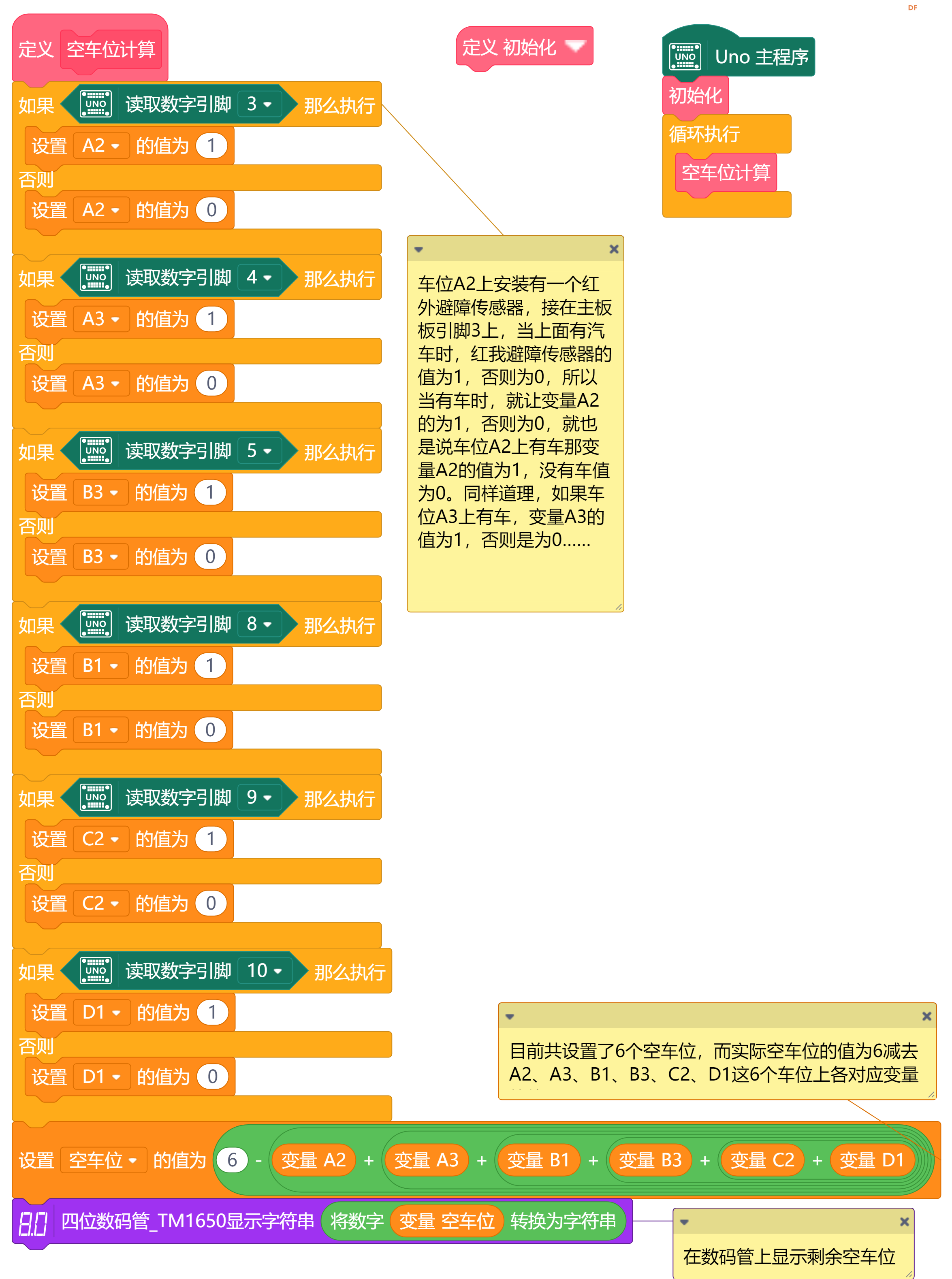 图19 “空车位计算”函数程序 5、入口处安装有一个红外壁障传感器和一个舵机,当有空车位时,红外壁障传感器检测到有汽车要进来,舵机就转一定的角度(打开闸门),过一段时间等车开进去后,再关闭闸门。 这里用了一个变量“临时空车位”,这个变量主要是为了与实际空车位进行比较,从而决定是否打开引导灯带。详细程序及说明如图20所示: 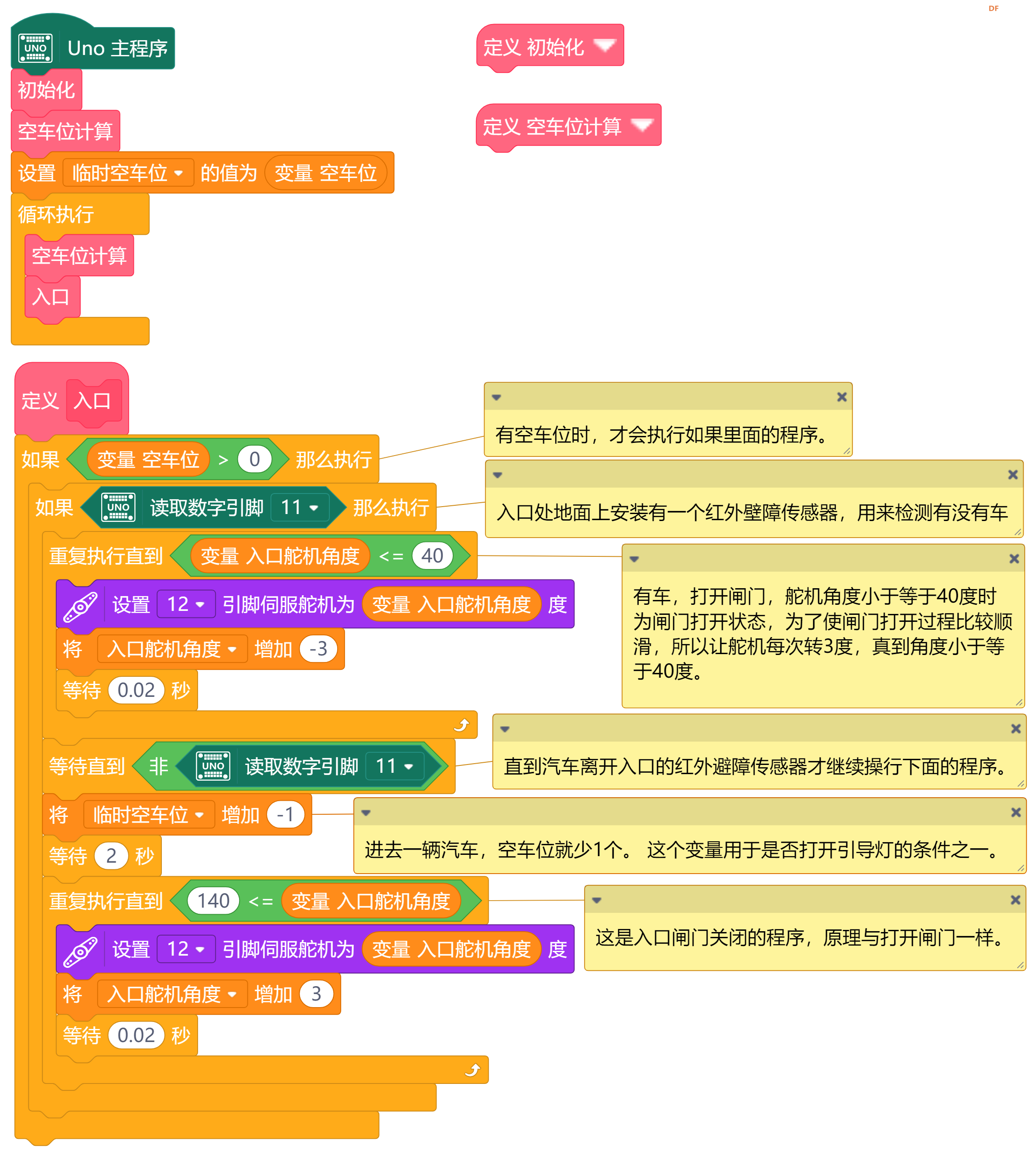 图20 “入口”函数程序 6、出口的原理与入口的基本上是一样的,详细程序程序如图21所示: 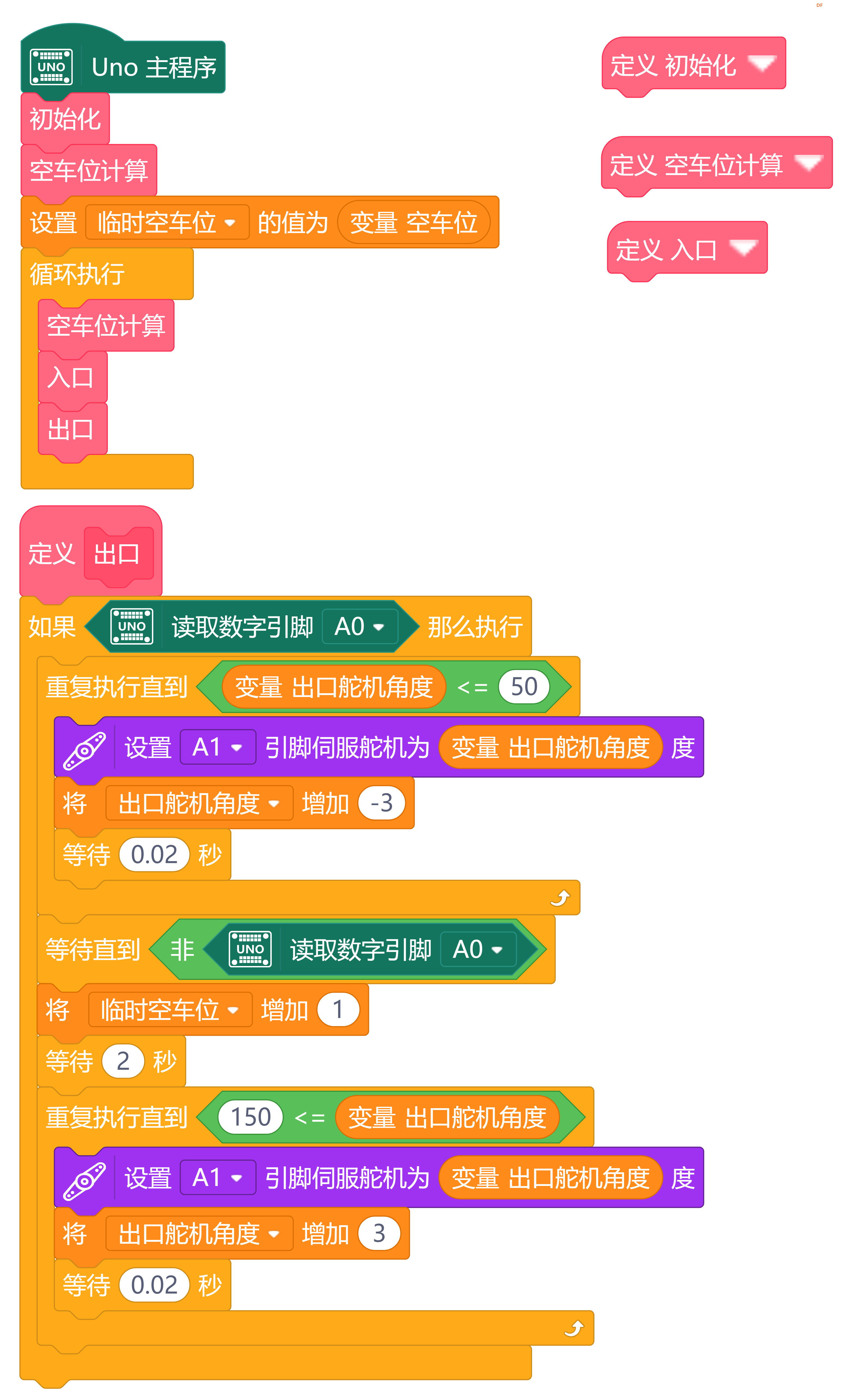 图21 “出口”函数程序 7、空车位引导灯是这个作品最关键的创新点,哪里有空车位灯带就会亮到哪里,这样司机就可以借助灯带引导从而把车开到空车位上。 新建一个“空车位提示”函数把它接到主程序循环执行里的“出口”函数下,“空车位提示”函数中灯带的亮灭主要由变量“临时空车位”和“空车位”之间的差值来决定的,而各条灯带亮灯的颗数是由空车位所在的位置决定的,具体程序及说明程序如图22所示: 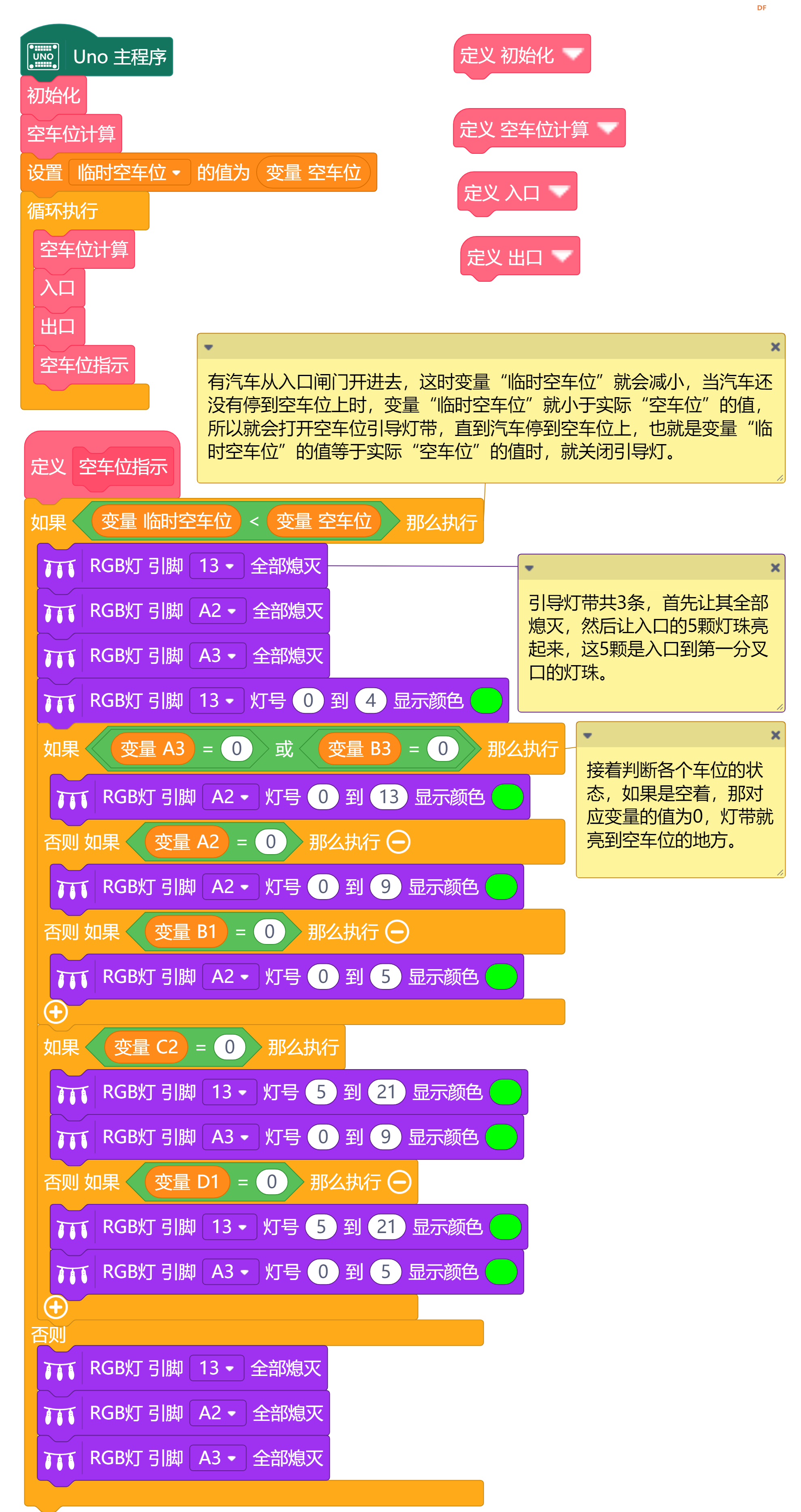 图22 “空车位指示”函数程序 8、最后,还增加了报警功能,当车库发生火灾或有害气体浓度大于一定值时,就会报警,报警时蜂鸣器、灯带、风扇、进出口道闸等都会作出相应的反应,比如蜂鸣器发出报警音,灯带光以红色进行闪烁、风扇开启进行通风、出入口道闸打开方便逃生等,这里只写了火灾报警的程序,有害气体报警方法是一样的。详细程序及说明程序如图23所示: 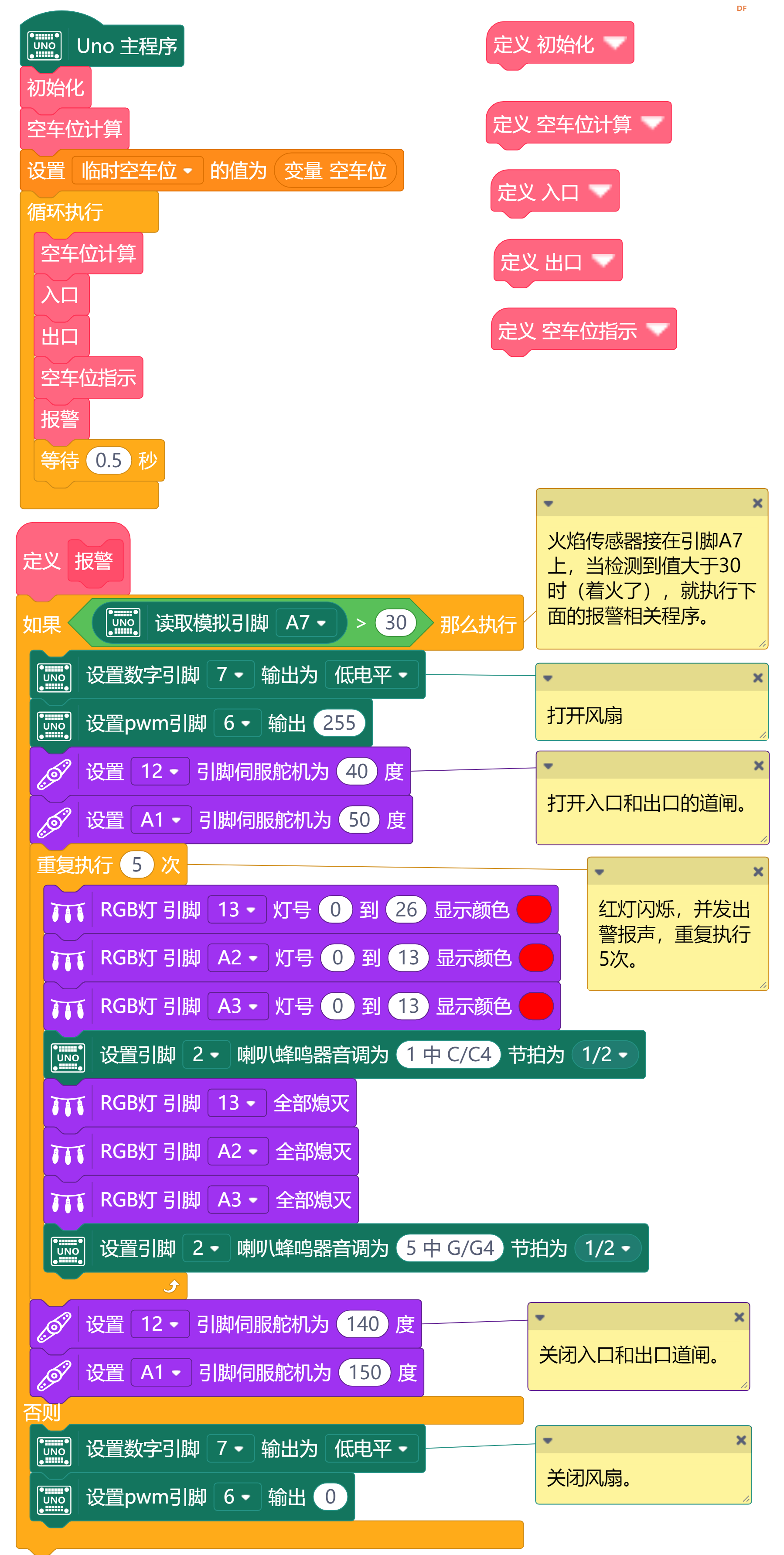 图23完整程序 【结语】 根据上面的介绍,空车位引导系统制作就完成了,有些具体的细节上于篇幅的原因,在这里没有详细展开,大家可以扫描文章标题旁的二维码观看作品的演示视频。当然,这个空车位引导系统还只是一个模型,在实际应用过程中肯定还会存在着许多问题,对这个感兴趣的读者可以进一步进行研究,争取发明出一套真正实用的系统,从而解决人们难以找到空车位的问题。 作者其它帖子 ◆ 告别上下车上锁下锁的烦恼——车位智能锁 ◆ 基于图像识别技术的作业提交助手 ◆ 从此不再害怕背古诗——古诗点播机 ◆ 一个具有视觉识别功能的留言管家 ◆ 防疫门禁 ◆ 拉风侠——垃圾分类小助手 ◆ 垃圾分类训练机 ◆ 盲人伴侣 ◆ 终点计时器 ◆ 无限梦幻镜 ◆ 智能药盒 ◆ 乒乓球收割机——AI捡球机器人 ◆ 捡球机器人 ◆ 变脸机器人 ◆ 多功能测量仪 ◆ 防近视笔筒 ◆ 猜拳机器人 ◆ 炫彩小夜灯 ◆ 麦昆PLUS巡线&避障 ◆ 手势控制MP3播放器&万能遥控器 ◆ 小便池自动冲洗器 ◆ 百变乐器 ◆ 留言机 ◆ 【2020】创意时钟 ◆ 爱的传递——AI爱心储物柜 ◆ 智能储蓄罐 ◆ 和弦吉他的设计与制作 ◆ 看得见的心跳 ◆ 保险箱 ◆ 乐高积木遇见麦克纳姆轮——动手搭建一辆麦克纳姆轮小车 ◆ 小尚,别跟丢了!——自动跟随的麦克纳姆轮小车 ◆ 来吧!一起动手制作一台架子鼓 ◆ 激光打靶器 ◆ 钥匙忘带提醒器 ◆ 麦昆智能晾衣架 ◆ 炫彩电子钢琴的设计与制作 ◆ 萌宠机器人的设计与制作 ◆ DIY留声机 ◆ 智能马桶 ◆ 坐姿矫正仪 ◆ 基于物联网的智能闸道、人数统计与安全预警系统 ◆ 远程监测温度和亮度 ◆ 来来来,让我们一起来打地鼠! ◆ 变色龙 ◆ 龙舟 ◆ 多脚怪 |
| 你好,请问能否提供以下“空车位引导”的详细配件清单?(文章里的清单都没写型号,怕买来不匹配),谢谢 |
|
主要是哪个红外线在DF里面买哪一个?<div class="reference"><p><a href="https://mc.dfrobot.com.cn/home.php?mod=space&uid=815082&do=profile" target="_blank">章</a> 2024-12-11 02:05:11<p><div class="quote">oAawe2tMiCUu 发表于 2024-12-10 20:57 你好,请问能否提供以下“空车位引导”的详细配件清单?(文章里的清单都没写型号,怕买来不匹配),谢谢 ... 这个作品是两年前做的,有些配件也忘记购买途径了 </div></div> |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖






