|
15355| 8
|
[项目] 旧物改造 | 创客奶爸带你制作遛娃神器 |

 #设计灵感 有一天旺仔的奶奶带孩子去外面玩耍,碰到一起玩耍的小伙伴骑着小车子出来玩了,旺仔特别想要骑一下人家小盆友的车子,于是对方奶奶就让旺仔骑了,但旺仔一骑不要紧,万般不肯下来,我们家也有一辆这样的车子,是用手推的,旺仔爸爸就萌生了一种想法,改装一下车子,让小朋友喜欢玩,让奶奶不用推着走,于是就有了今天的作品 先来看一下演示视频: #方案确定#本次作品实现的主要目的是让小车子变成电动的,能够遥控,甚至可以随手拿出手机来操控,用一个电机带动车子前进后退,使用一个舵机控制车子左右转向 要给小车子加持电动功能的话,必须加入执行器电机,电机的选型尤为关键,并且要载人的话,就不能用很普通的电机了,于是在某宝淘了儿童踏板车的735电机 电机确定了之后就是如何选择电机驱动的问题了,735电机是有刷直流电机,最简单最直接的方法是用一个有刷直流电调驱动电机,通过车模或航模的遥控器给接收器发送数据从而控制车子行驶,然后还可以再增加一个舵机控制转向,这个方案显然是没有问题的,因为已经有很多这样成熟的案例可以借鉴了,尤其是在格斗机器人界内,这种玩法很普遍,之前旺仔爸爸参加过一次2kg级别的格斗机器人赛事,所以电装部分可以直接拿来使用 除此之外,还有没有其他方案了呢,肯定是有的,如果第一套方案算作是一个非编程版本的话,那么我们还可以做一个可编程版本的方案,实现的思路有两种,利用Arduino uno控制器结合2.4g遥控手柄来控制车子行驶或转向,第二种思路是利用esp32类型的可联网主控,通过手机与主控wifi或蓝牙连接从而达到无线通信遥控车子的目的,听起来是一种高大上的方式,旺仔爸爸丝毫没有犹豫就决定使用esp32作为可编程版本的主控,接下来本文通过两种改造方案来介绍此次的作品“溜娃神器” #拆解#不管是哪一种方案,第一步首先要做的就是对小车子进行拆解  可编程和非编程的版本的共同之处就是行驶电机和转向舵机部分了,于是我们先从电机改造安装说起 如何安装和固定电机,并且能够驱动轮子转起来,是比较关键的地方 从下图中可以看出旺仔爸爸的解决方案 通过3D打印的轴套将法兰与轮子固定,将16齿同步轮安装在735电机轴上,通过同步带带动光轴上的80齿同步轮做减速运动  用3D建模软件设计的轴套如下图所示 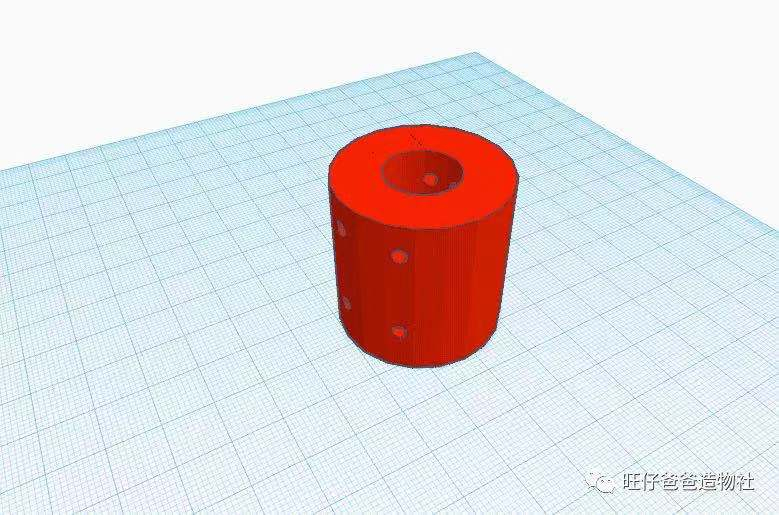 设计完成之后进行切片打印  下面为打印完成后的效果  紧接着将轴套安装在轮子上,利用电钻开3mm的圆孔,并用螺丝固定   接着安装法兰和菱形的带座轴承   使用3mm的自攻螺丝将法兰与3D打印的联轴器固定,带座轴承通过4mm的螺丝和螺母固定在车体上 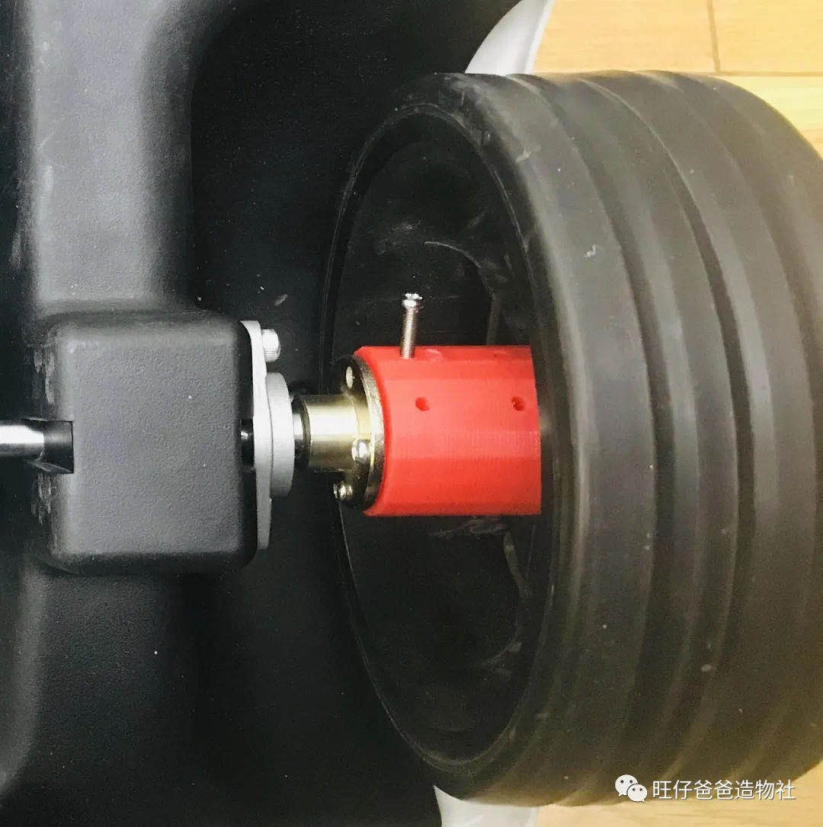 下面一步,我们需要安装电机,以及传动部件,下图为2GT5mm的同步带和16齿、80齿的同步轮   735电机使用下图的直角固定件固定在车子底盘上   执行器电机和行驶轮子改装后的最终样子如下图所示 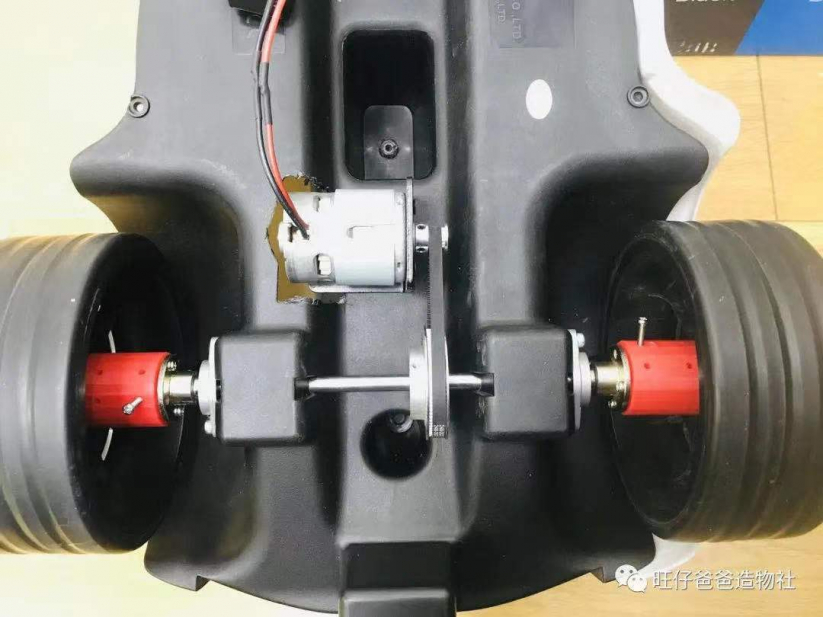 行驶电机改造好后,接下来介绍转向舵机,本次作品采用的是一款DFrobot出品的270度金属数字舵机,工作电压4.8-7.2V,负载15Kg,作为小车的转向舵机足够了  有了舵机后,我们还需要1个舵臂和1个球头拉杆控制车子转向   舵机安装效果如下 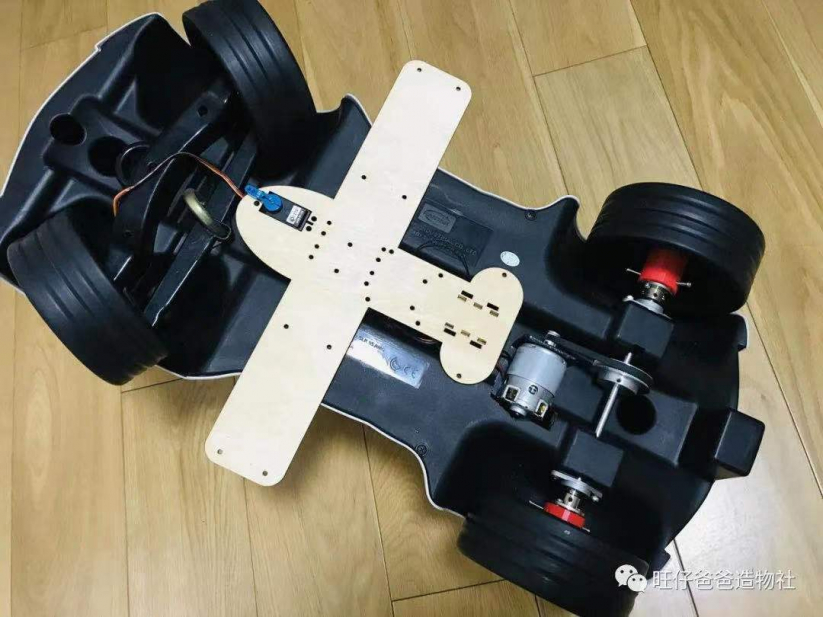 转向部分的舵臂和球头拉杆安装如下 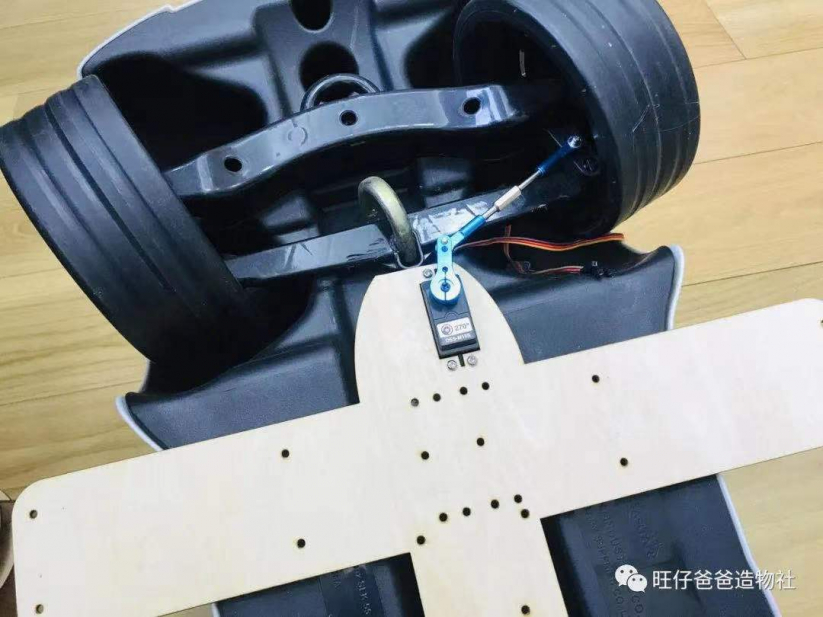 两个版本通用的电机部分和舵机部分改造好后,我们来分别了解每个版本是如何实现其他功能的 #非编程版本电装#下面是非编程版本用到的电装清单 735直流电机*1 15kg270度金属舵机*1 有刷电机电调*1 富斯遥控器*1 富斯接收器*1 3s1800mah锂电池*1 舵机转接板*1 船型开关*1 五金件,导线,电源接头若干 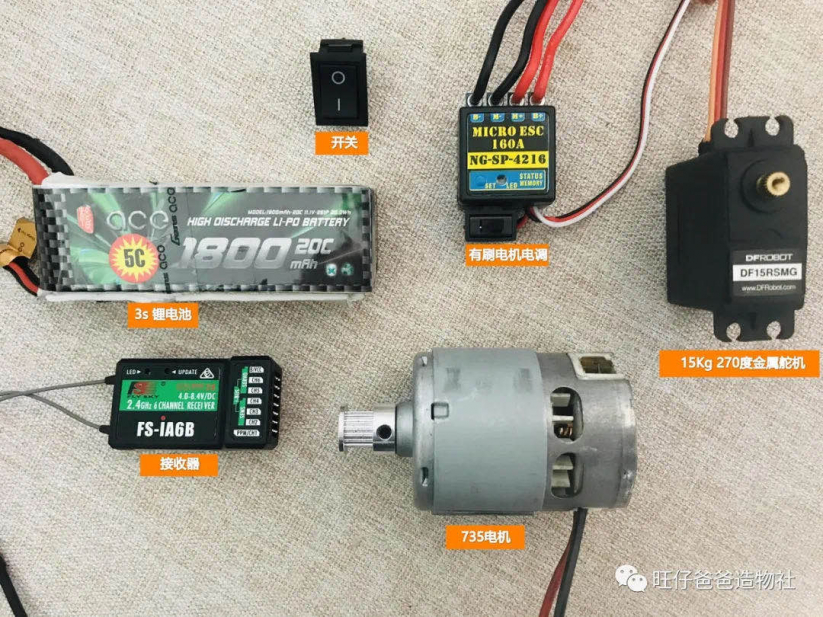 富斯FS-i6 2.4G10通道遥控器  电路接线如下图所示,电源采用1800mah3s的锂电池,行驶电机的有刷电调连接接收器的2号通道,舵机连接接收机的4号通道,这里使用了一块专用的扩展板为舵机供电 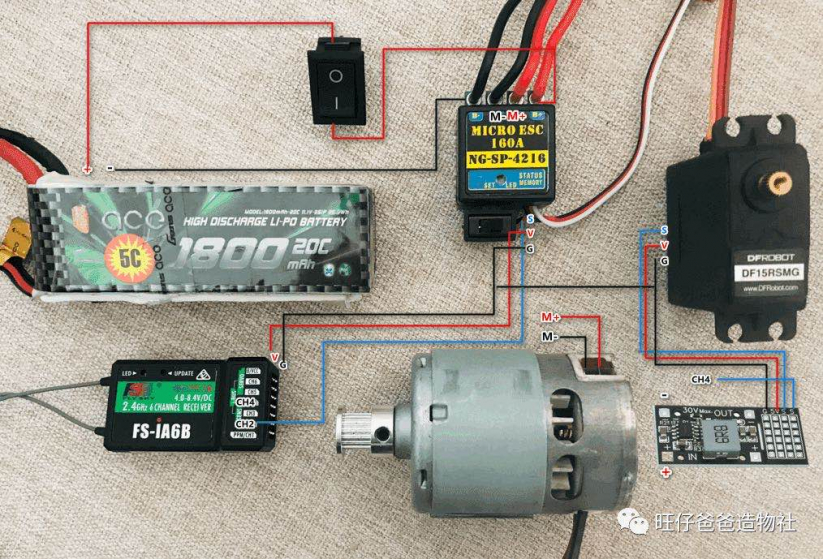 接线完成后的效果如下图所示(舵机的图片漏拍了) 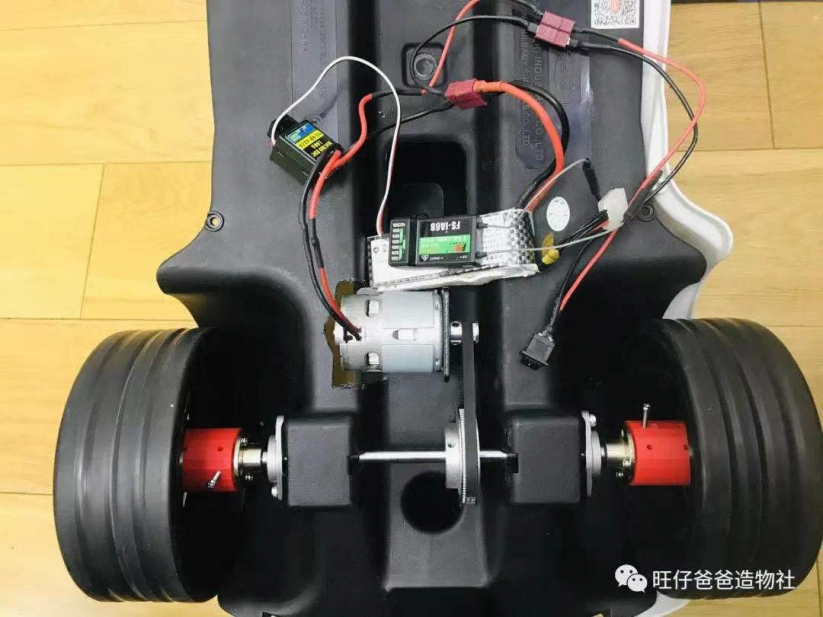 为了使用方便,在车体外壳上开孔安装了开关  最后我们来测试一下非编程版本的效果如何  #可编程版本# 下面我们来了解可编程版本是如何实现功能的 首先我们来认识一下都用到了哪些电子硬件 主控我们选择的是esp32,使用它的wifi或蓝牙无线通信功能,随时随地拿出手机来操控车子,这样让我们的作品档次提升了不少 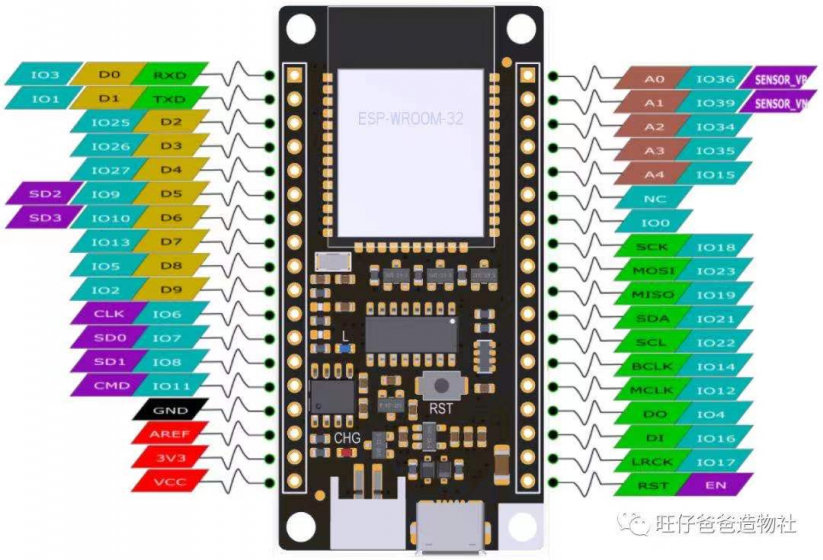 esp32的详细介绍可以点击下方连接了解 接着就是比较关键的行驶电机驱动,要承载一个小朋友的重量,电机驱动的工作电流一定要够大,为此我们选择了下面一款直流电机驱动,工作电压12-36V,工作电流12A(无散热)-20A(有散热)  直流电机驱动板有3个控制引脚,2个引脚控制方向,1个引脚控制速度,有5v电源输出,下面两图为引脚的功能介绍和具体使用方法 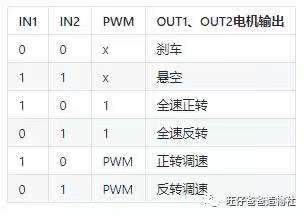  直流电机驱动的详细介绍可以点击下方连接了解 最后旺仔爸爸给车子附加了音乐功能和灯光功能,实现音乐功能使用了DFPlayer Mini mp3模块(需要自备一个micro sd卡),这个模块小巧且功能强大,直接使用串口控制,模块可以直接驱动一个8欧0.5w的喇叭 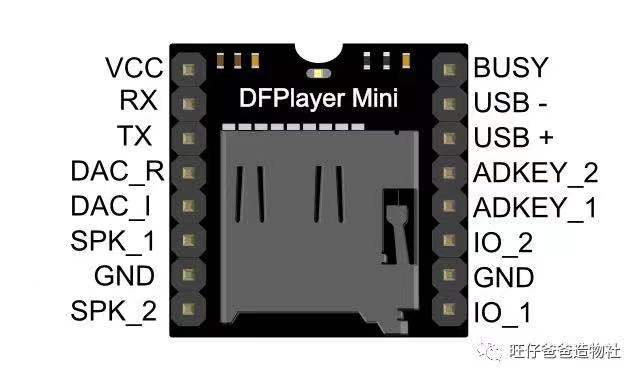 下图为MP3模块引脚的具体使用方法  mp3模块的详细介绍可以参考下面网址 灯光功能则使用了ws2812灯带 所有电子清单如下图所示,使用了一块大功率的转接板为舵机供电,主控esp32使用了一块扩展板方便接线,执行器电机还是使用的735电机  下面是编程版本的接线图 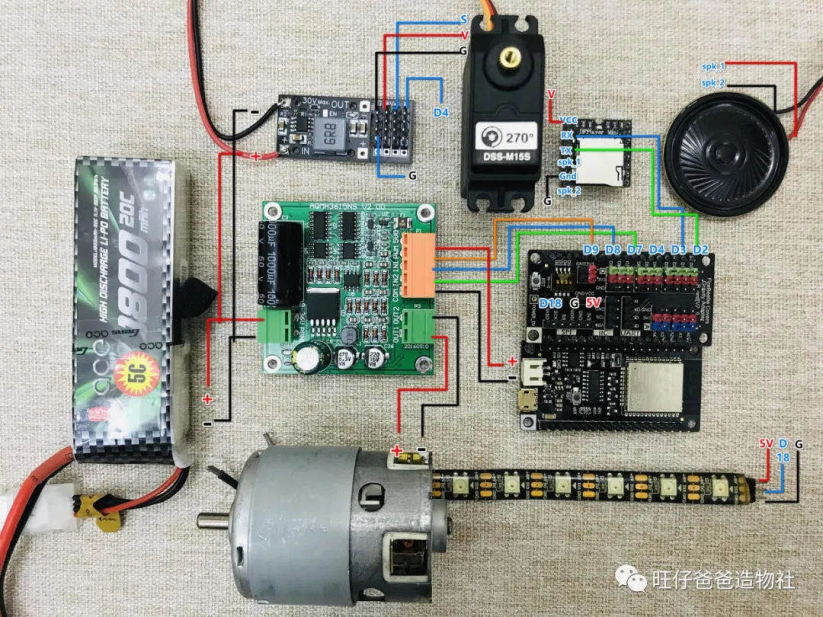 为了方便安装电子件设计了飞机造型的底板,同时兼做小朋友的脚踏板,设计图纸如下图所示 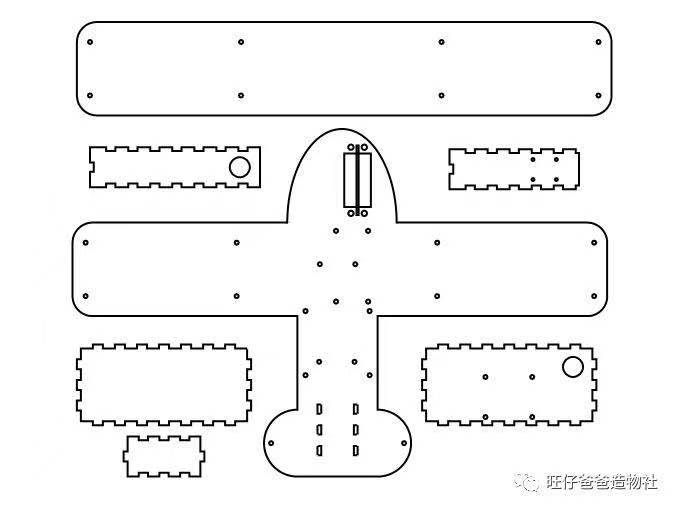 下面是利用激光切割机加工3mm椴木板的实物图 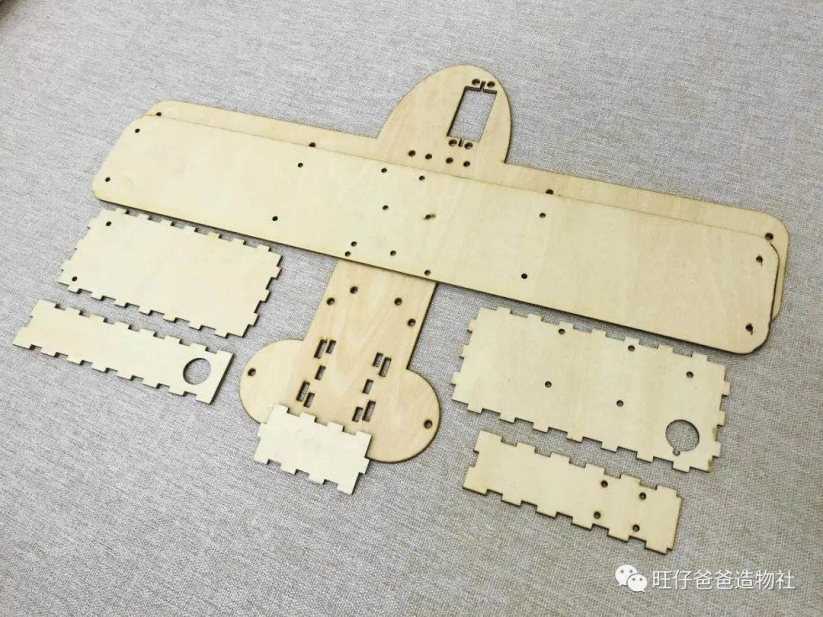 电路接线完成后效果如下图 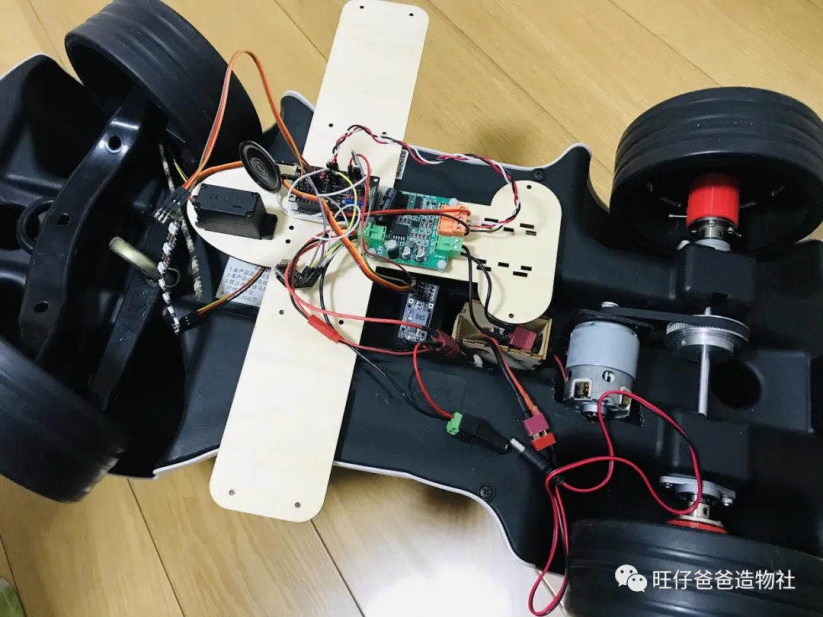 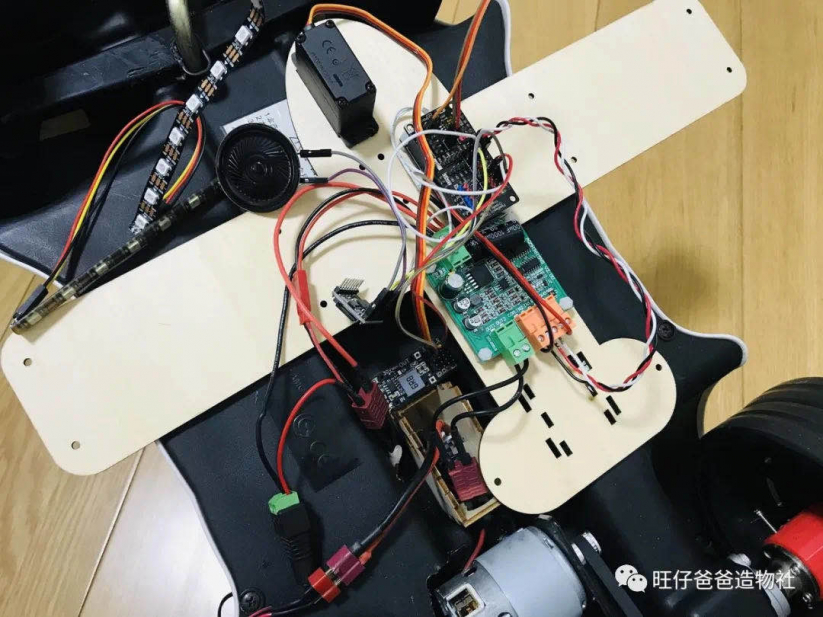 打孔布线安装ws2812灯带为车子增加灯光功能   和非编程版本一样电源部分同样采用了1800mah3s锂电池,专门设计了电池外壳与飞机底板链接  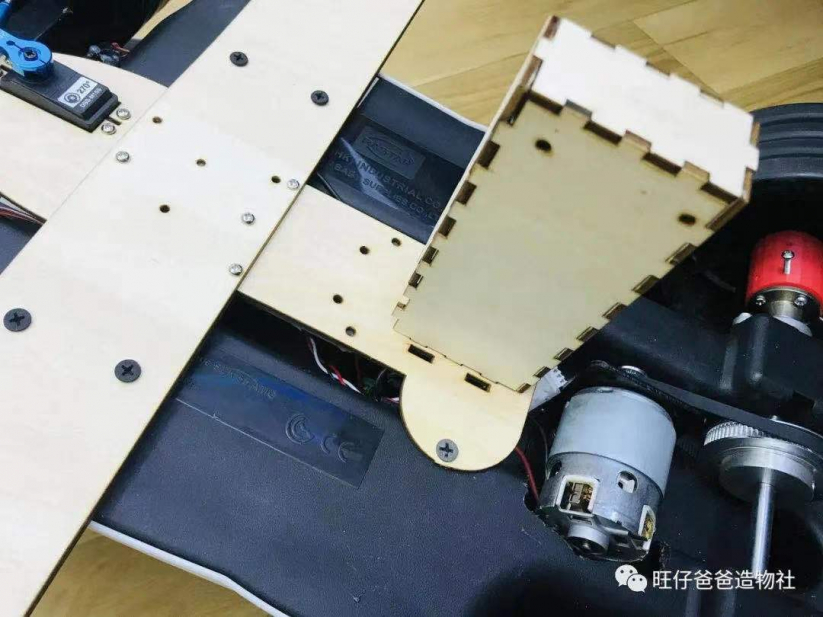 组装完成后的最终效果展示     #程序设计# 程序设计主要涉及到两部分,一部分为blynk移动端的遥控组件设置,另一部分为esp32主控端的程序编写,我们先来对移动端的blynk进行设置 blynk设置第一步登陆账号,如果是第一次使用需要先进行注册,如下图所示“Login”为登陆,Create New Account ”为注册  输入账号密码进行登陆  登陆成功后,点击“New Project”上面的+号新建项目  接着选择主控为ESP32 Dev Board 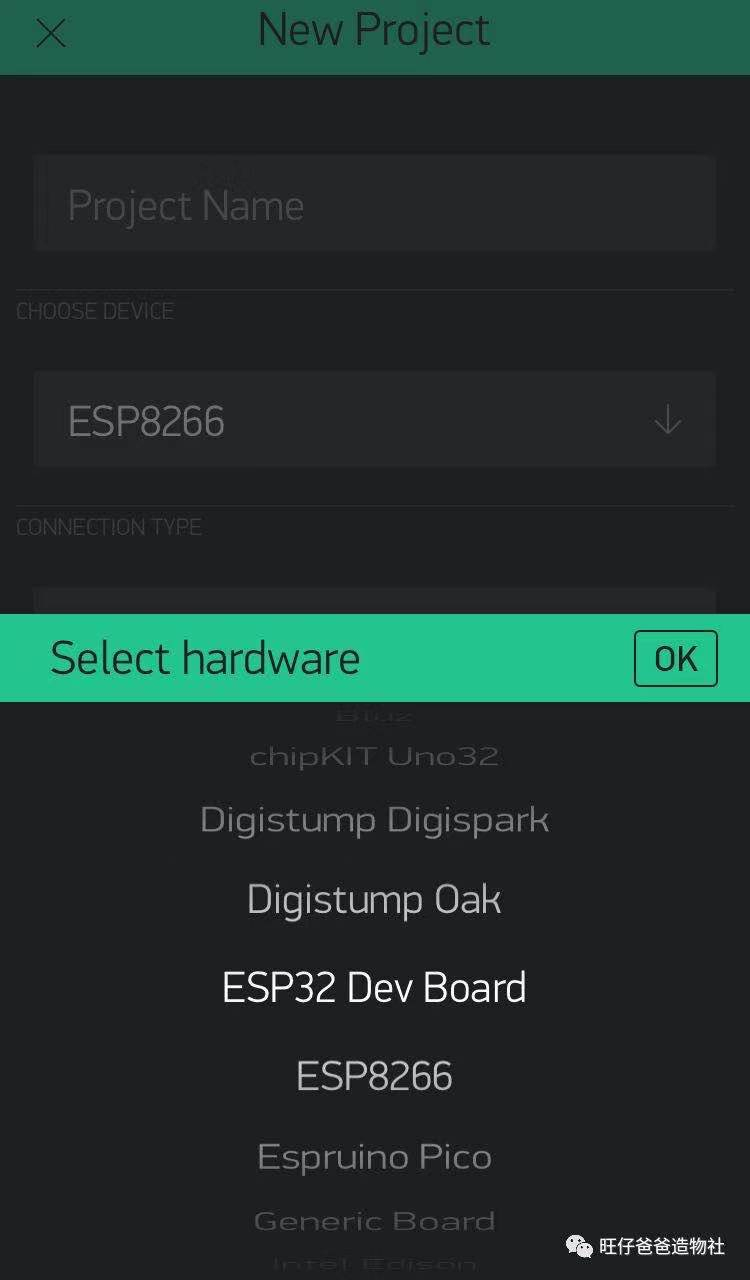 点击“CONNECTION TYPE”选择连接方式 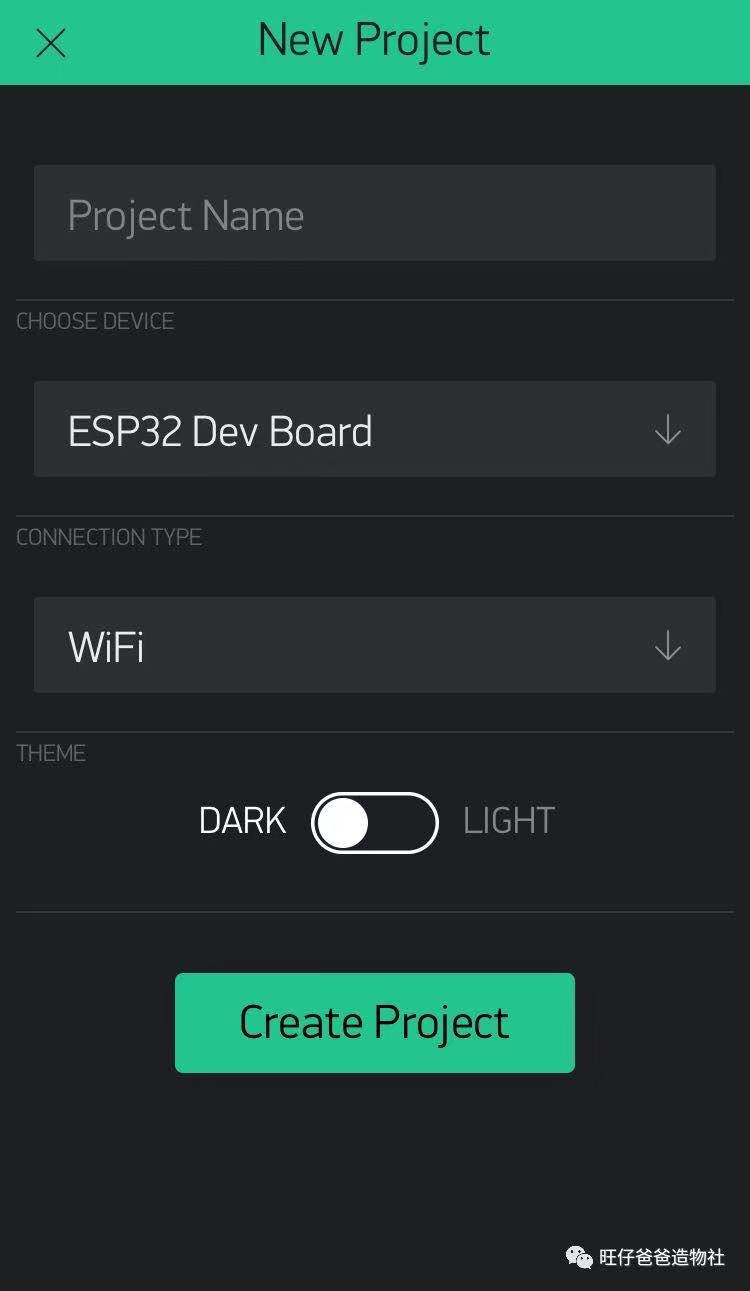 本次任务,我们可以选择wifi和蓝牙两种方式,在操控响应速度方面蓝牙模式会更快一点,基本没有延迟,旺仔爸爸以蓝牙方式进行讲解,这里我们选择“BLE”模式 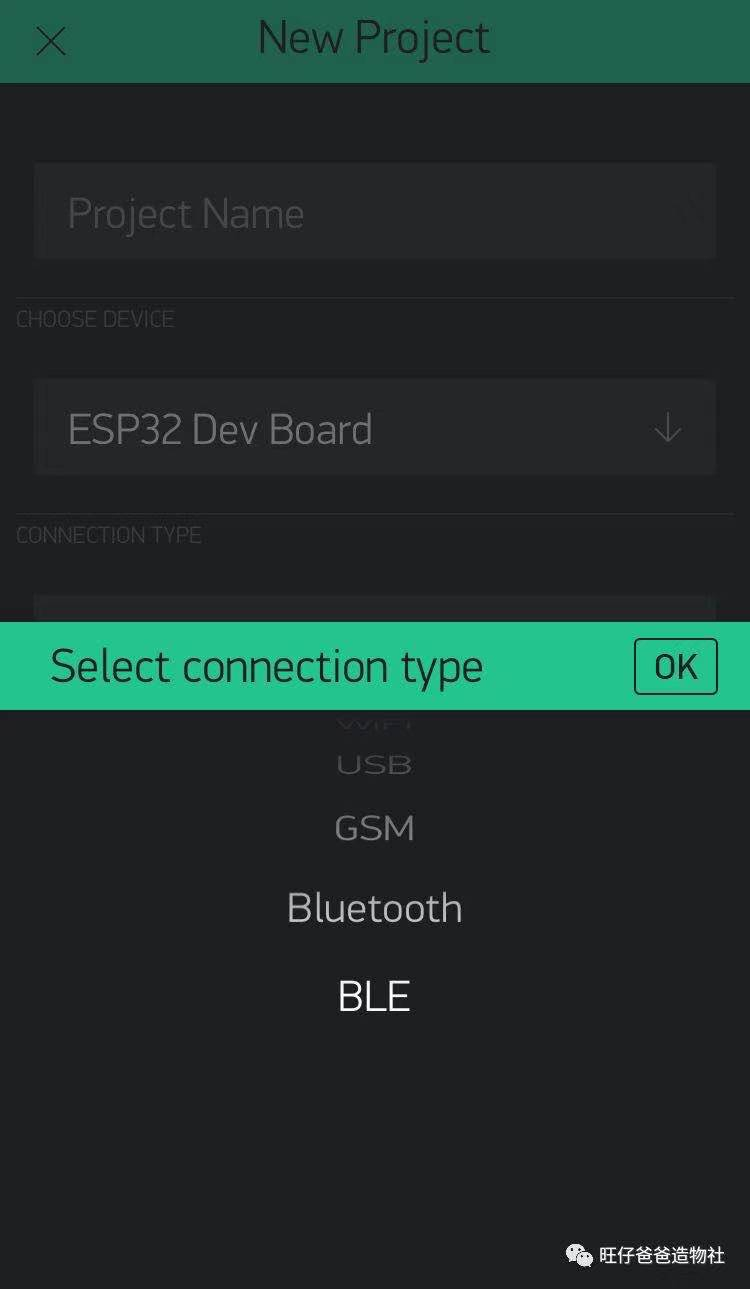 选择完成后,点击“Create Project”按钮,会询问是否向邮箱发送一封包含授权码的邮件,点击OK即可创建项目并收到这份邮件,当然你也可以在项目中找到该授权码,这个授权码是blynk移动端与ESP32控制板蓝牙连接的关键,在编程时会使用到 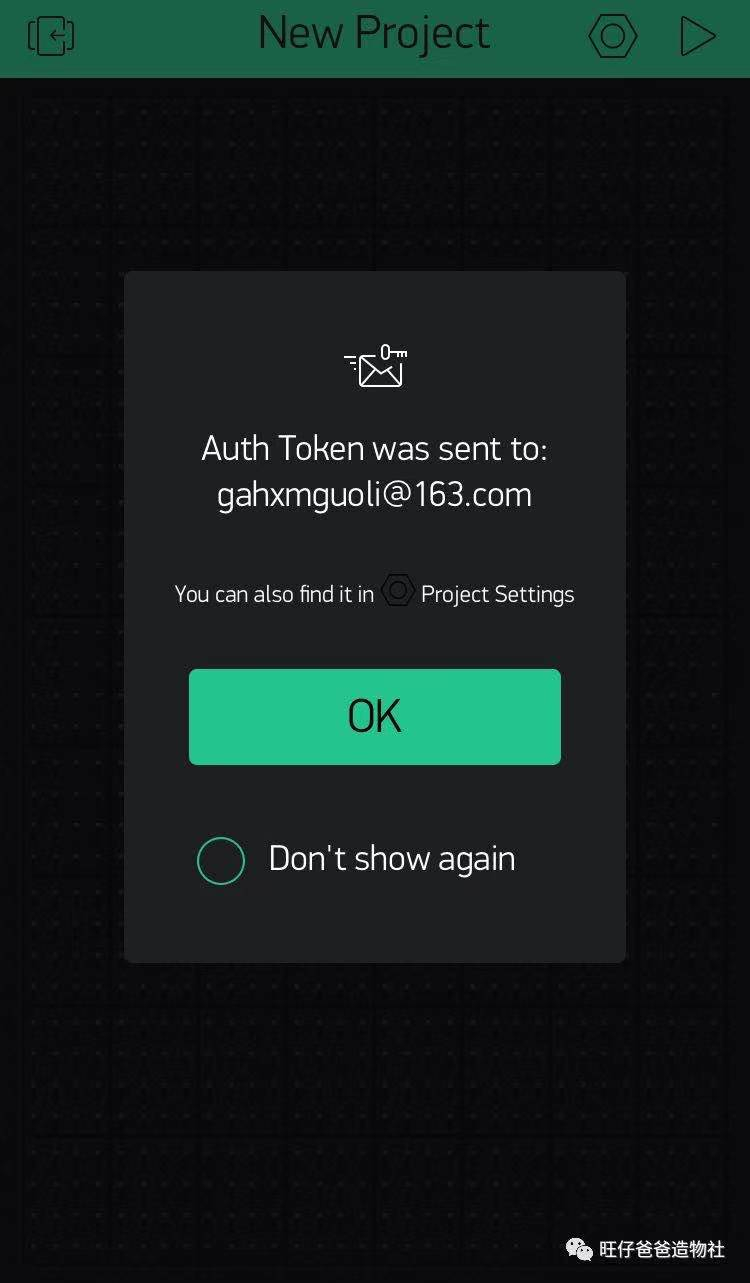 点击右上角的六边形可以进入项目设置界面,在最下方也可以看到授权码的信息,如下图所示 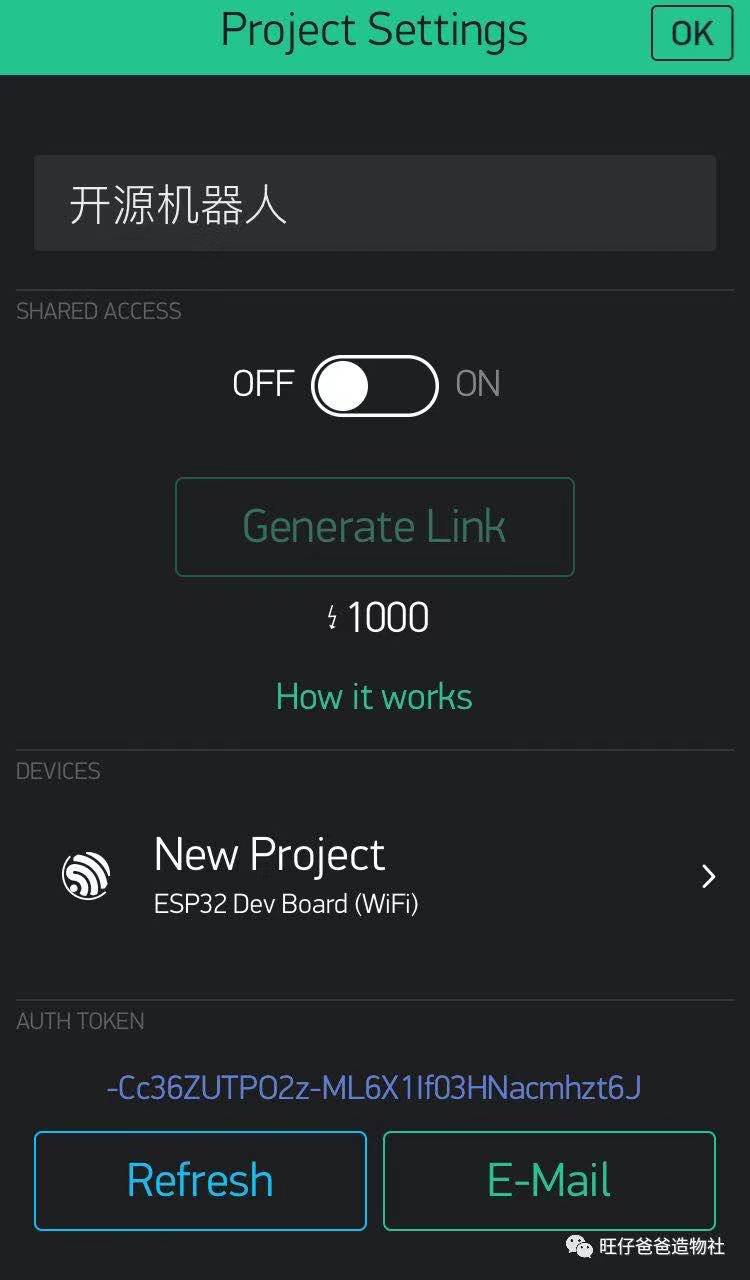 APP向左滑动可以添加组件,组件列表如下图所示,我们本次需要使用1个按键“Button”、2个“Styled Button”按键、2个摇杆“Joystick”以及1个蓝牙“BLE”组件 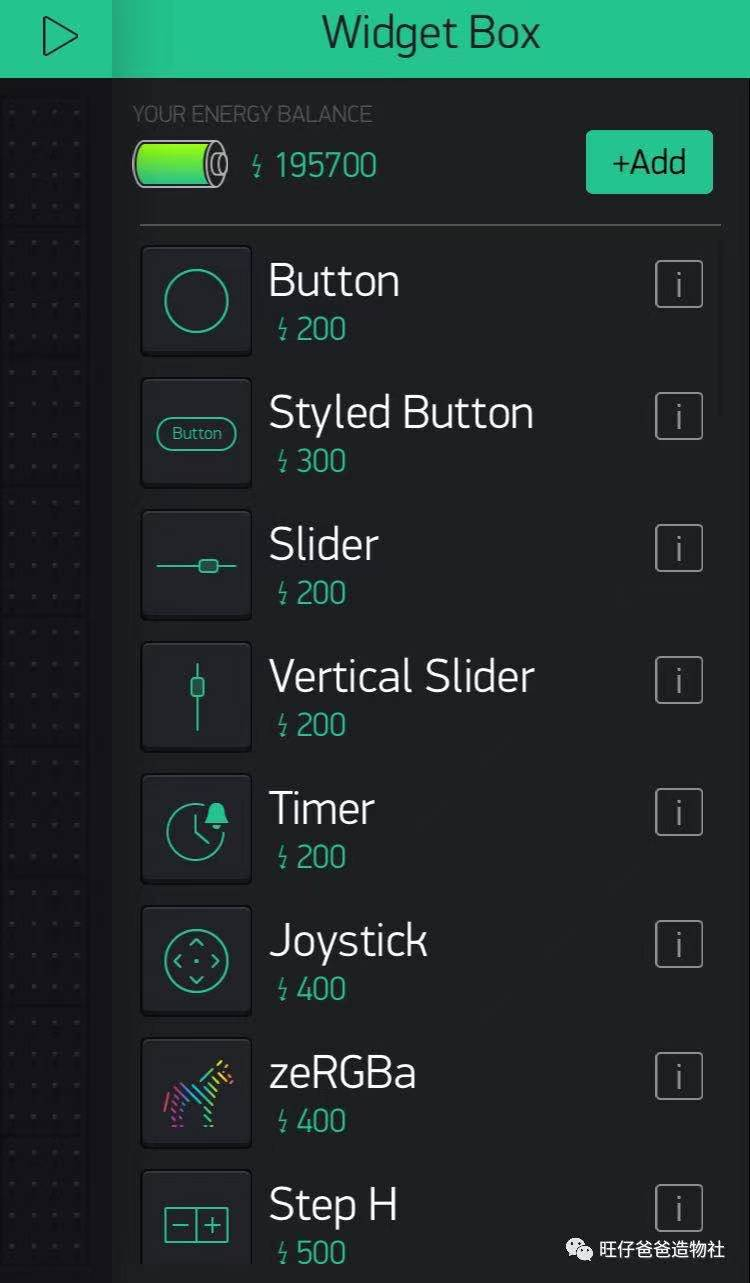 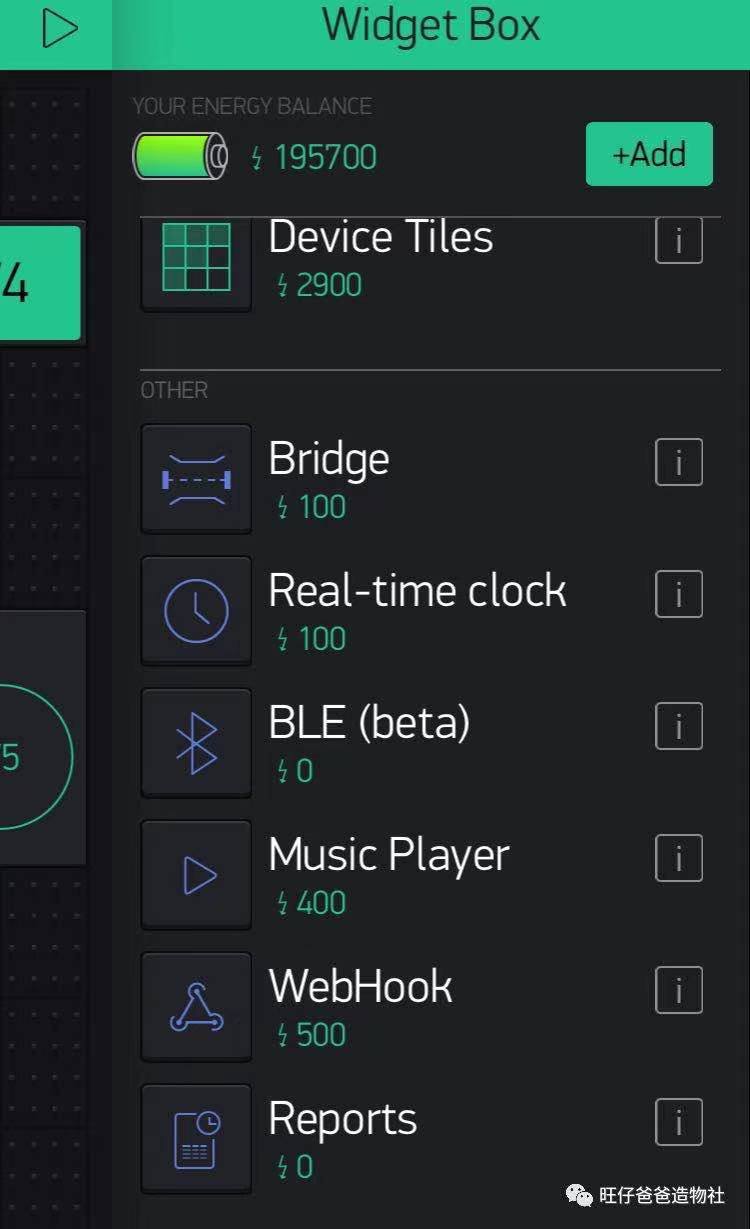 加载好的组件,如下图所示 我们把它横过来看,方便讲解,这样也是操控时的姿势,由于blynk还没有横屏的功能,所以有些字看着有些别扭,不过这丝毫不影响我们使用  为什么要用两个摇杆呢,是为了控制方便,我们用左边的摇杆控制前进、后退,用右边的摇杆控制转向,左边的摇杆设置为虚拟引脚v0和v1,右边的摇杆设置为虚拟引脚v2和v3,设置过程如下图所示 V2引脚控制舵机的旋转角度,由舵机控制车子转向 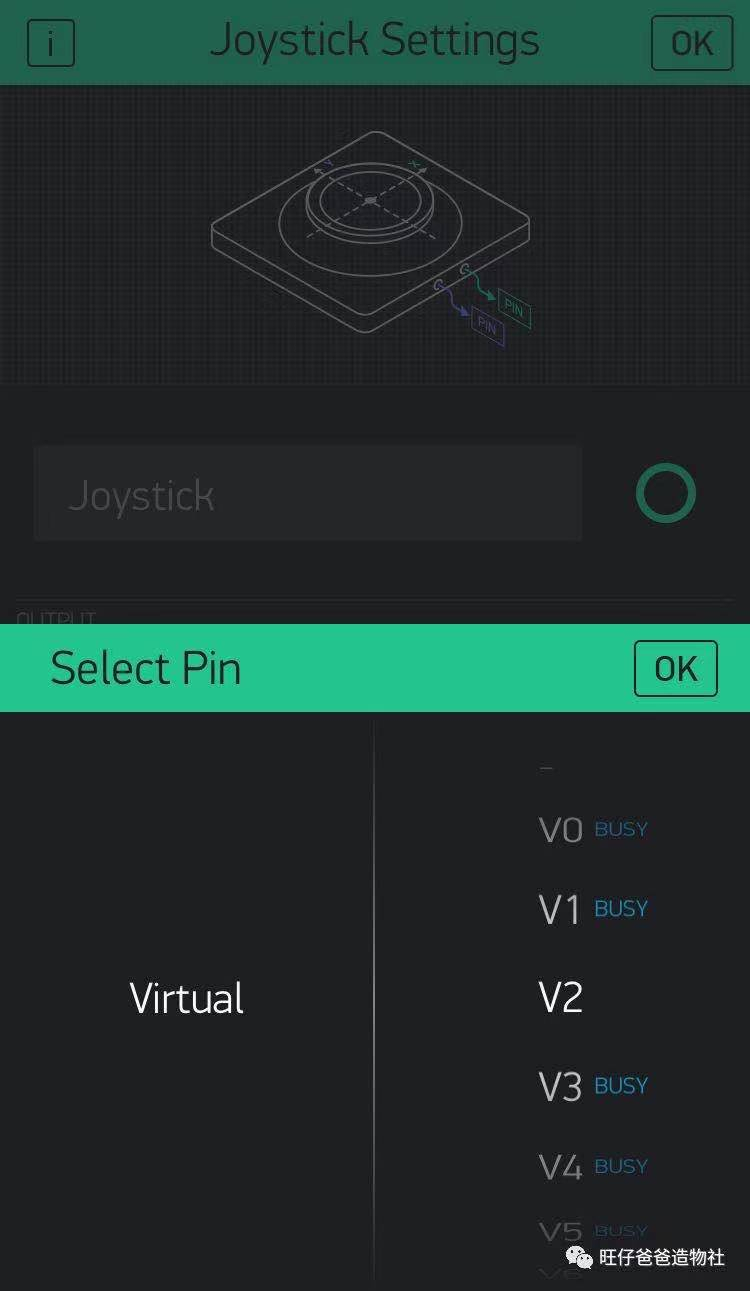 V0引脚控制前后方向 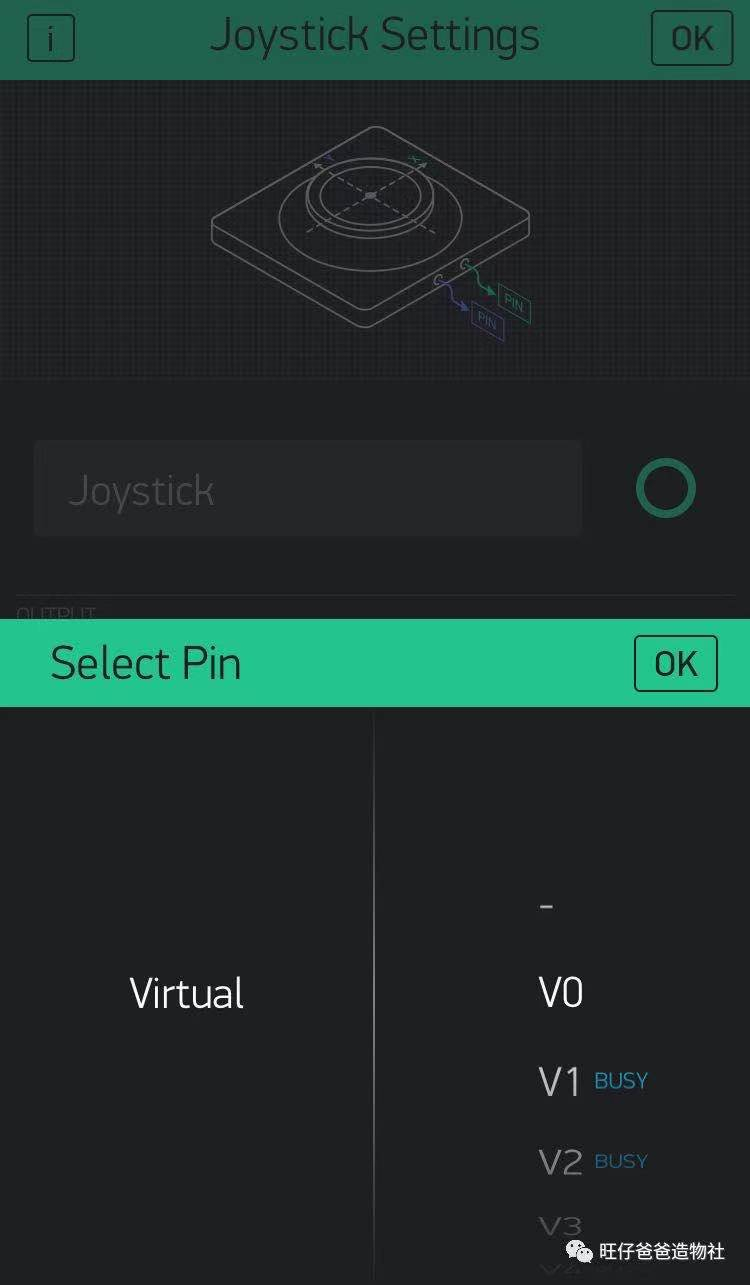 经过测试,V2控制转向的虚拟引脚的数值范围设置为60-120,可以控制车子左右灵活转向,V0虚拟引脚用来控制速度,数值范围设置为0-160时可以提供负载一个小朋友的动力 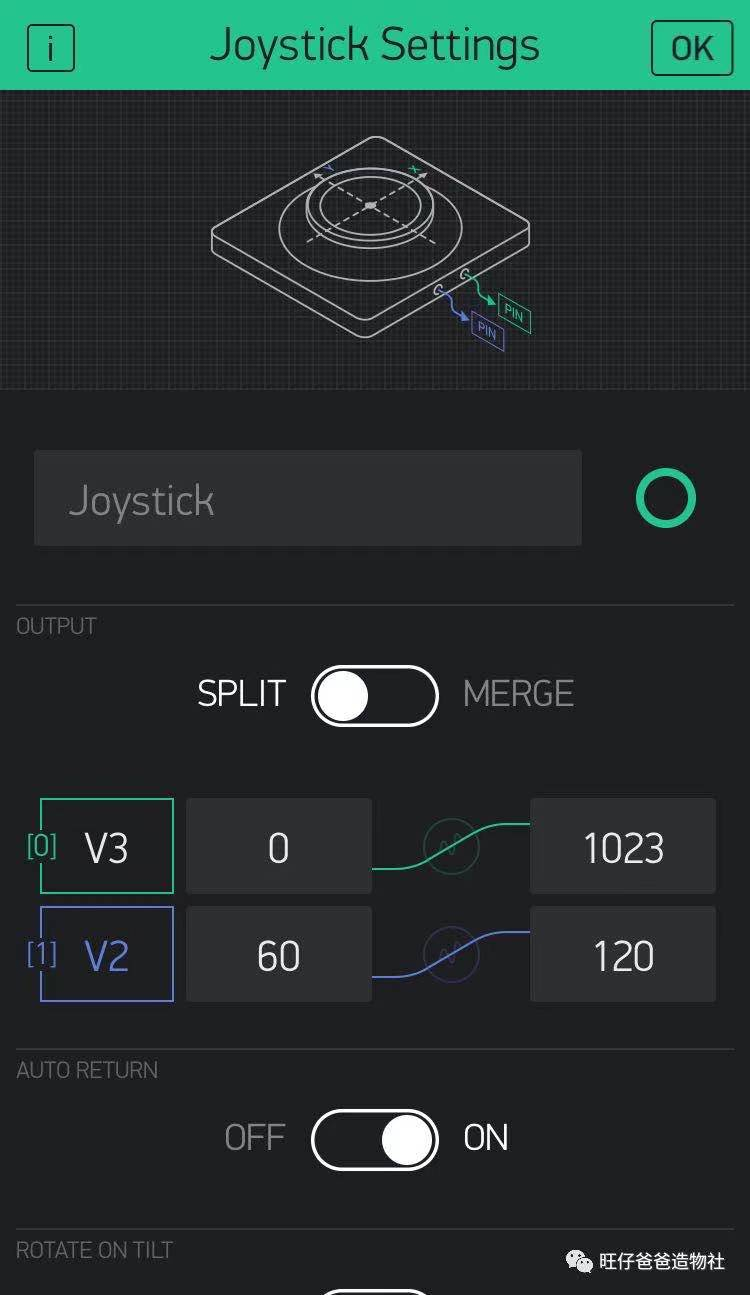 接着我们需要设置两种按键“Button”和“Styled Button”,这里为什么是两种按键呢,其实原理都是一样的, 都能实现我们想要的功能,只不过为了好看,美观,旺仔爸爸选择了不同的按键 3个按键分别为V4、V5和V6虚拟引脚,左边为V5,右边为V4,两个摇杆的中间为V6引脚,细心的伙伴应该会看出,有些按键设置的模式不同,没错,按键设置有“PUSH”“SWITCH”两种模式可选 V4虚拟引脚用来鸣笛,设置为“PUSH”模式,按一下播放一次鸣笛和灯带闪烁的效果,不按就复位 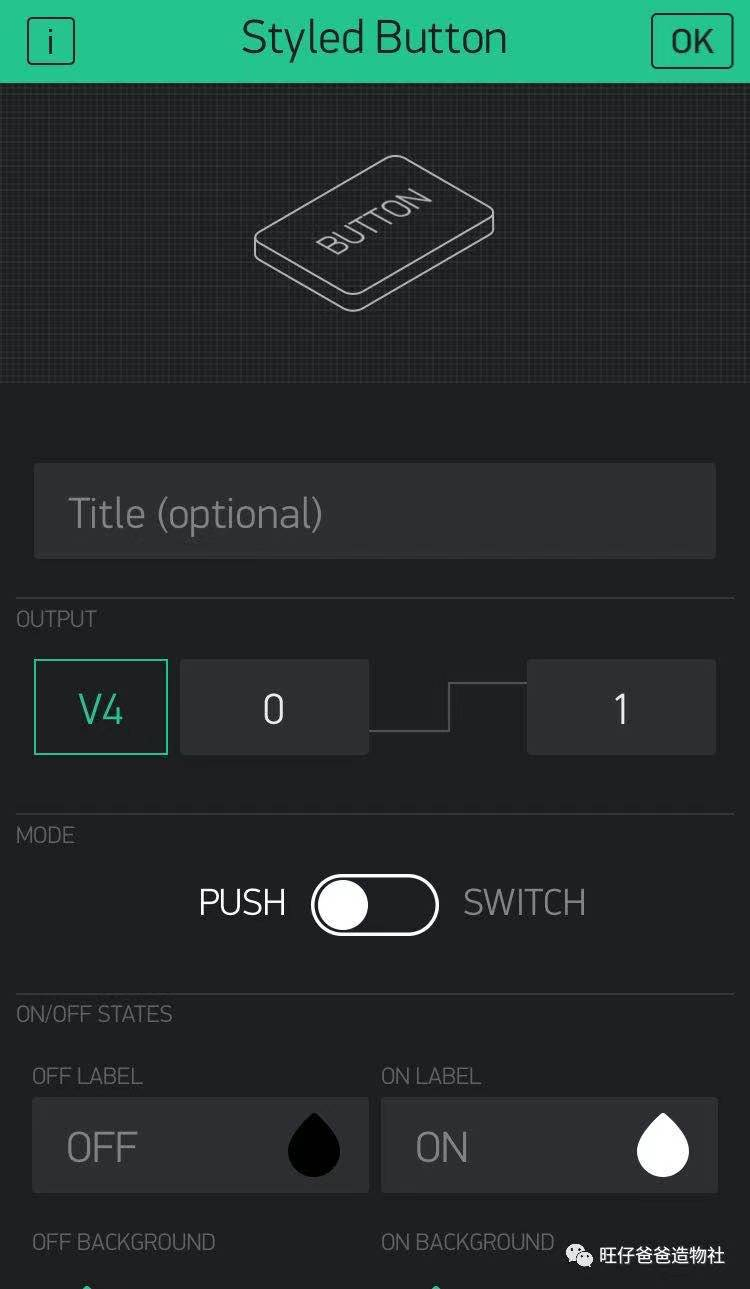 V5虚拟用来控制是否播放歌曲,设置为“SWITCH”模式,按一下锁定开始播放,再按一下停止播放 V6虚拟用来控制灯光,设置为“SWITCH”模式,按一下锁定亮灯模式,再按一下停止亮灯  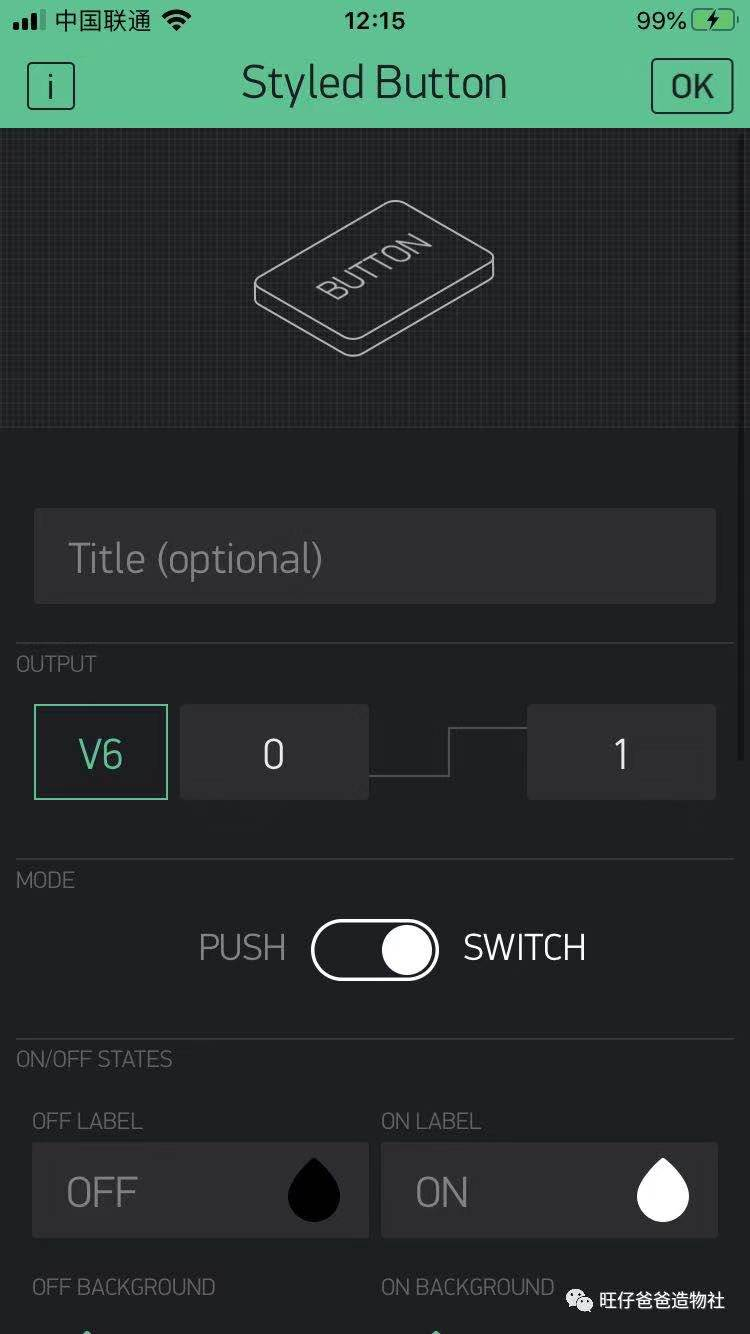 最后还剩一个蓝牙模块需要设置一下准备工作就完成了,点击蓝牙模块会看到如下图所示的界面,接着点击“Connect BLE Device” 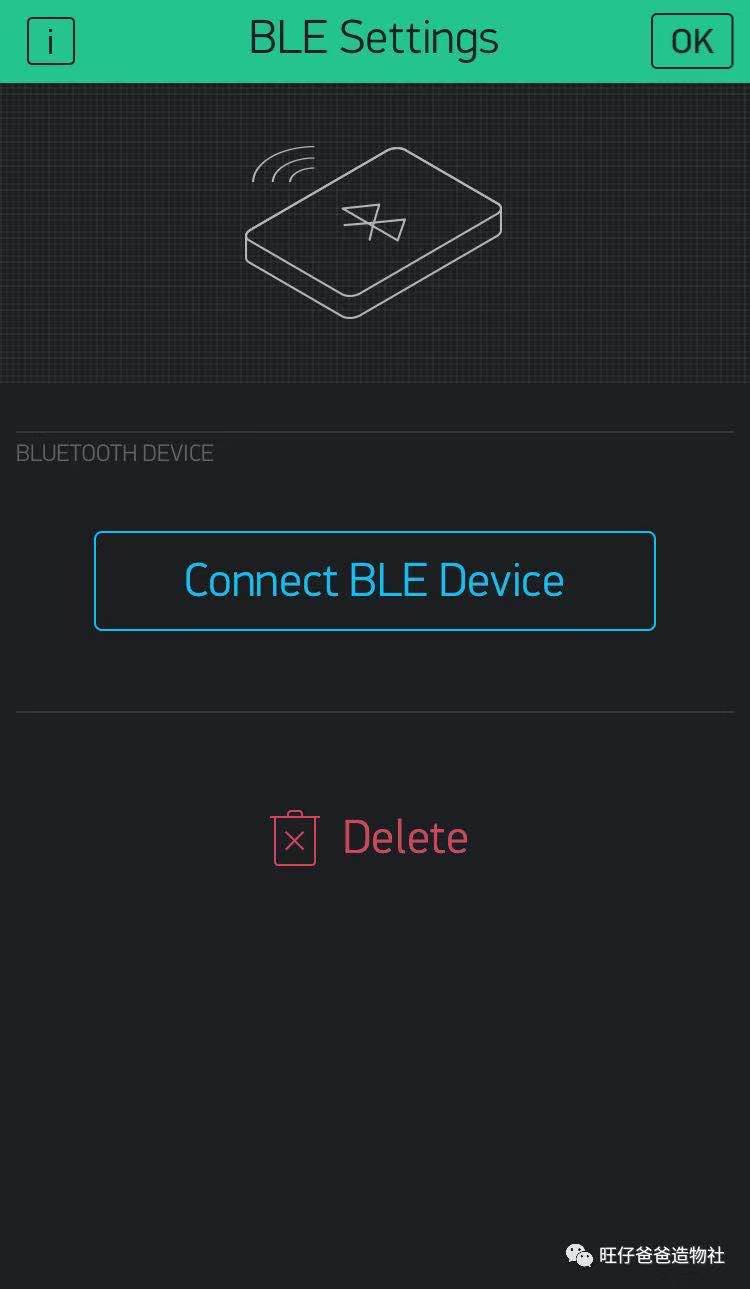 选择搜寻到的蓝牙名称,这里的名称是在程序里设定好的,找到你自己设定的名字即可,之后点击“ok”,等待连接成功 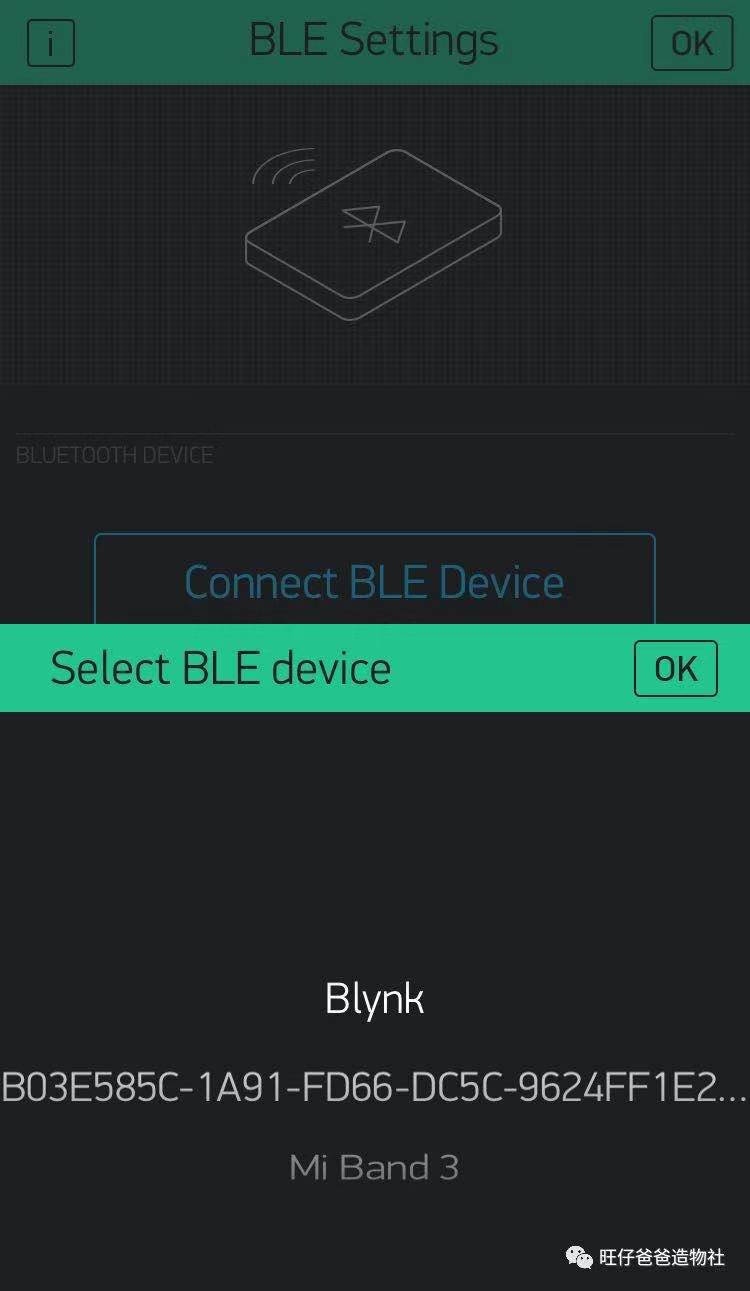  最后我们点击右上角的“三角”形就可以用运行这个程序了 blynk移动端的组件设置完成后,接着我们来编写esp32主控端的程序 本次项目的程序实现可以选择的编程环境有mind+,mixly,arduino 由于mind+编程环境esp32板卡下不支持blynk,arduino ide对于大多数人来说还是比较晦涩难懂,所以本次的程序设计旺仔爸爸采用mixly编程环境 mixly程序设计第一步,我们先来了解Blynk的编程方法,打开mixly编程软件,右下角板卡选择arduino esp32,左侧模块栏中选择“网络”中的“Blynk物联网”,将本次需要用到的“Blynk BLE链接方式”模块拖至右侧程序编写区域,接着对“Blynk授权码”和“BLE 名称”进行修改,这里的授权码像钥匙一样,需要和“Blynk”移动端的保持一致  对“Blynk”设置好后,接着我们尝试来做一些小任务 比如,我们可以从左侧“网络”模块里“Blynk物联网”中选择“从App获取数据...”,本次项目用到最多的也就是这个模块了,我们掌握一个简单的应用后其他的基本上就全部理解了 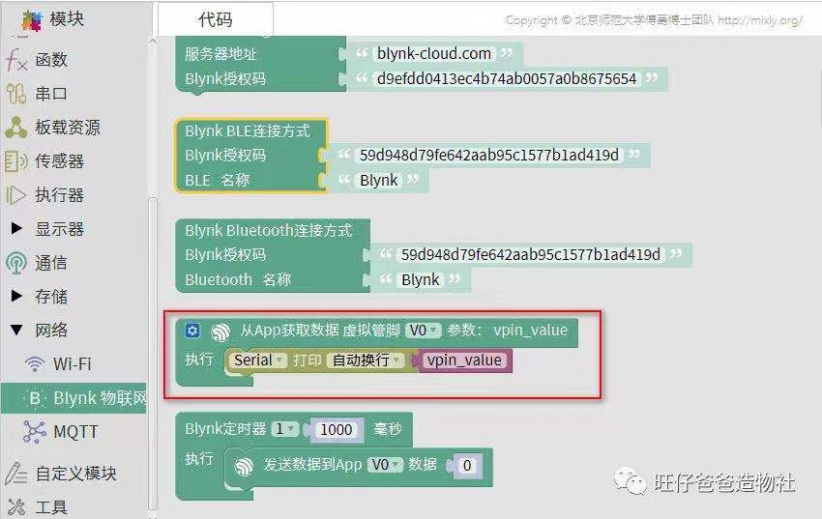 我们可以尝试编写如下程序,当V4虚拟引脚接收到数据时会执行3件事情,先让串口在串口监视器中打印接收到的数据,这样会方便我们调试,第二步让MP3模块播放第4首歌曲,最后执行一个名叫“眨眼睛2”的自定义函数,如果不纠结MP3模块和自定义函数的话,这里的程序其实很好理解  MP3和灯带程序 那么MP3模块是怎么做到播放歌曲的呢,需不需要做哪些准备工作,显然是需要的 我们需要在左侧模块栏“执行器”中选择对MP3进行初始化程序块,这里旺仔爸爸要感谢一下裘炯涛老师,因为本来最新的mixly版本中,esp32还不支持Mini MP3模块,是裘老师特意帮忙制作了图形化库才让旺仔爸爸能够使用MP3模块,在调试blynk移动端的程序时裘老师也给旺仔爸爸提供了很大的帮助,特别感谢裘老师的支持,为裘老师对blynk生态做出的突出贡献点赞,裘老师也是一位奶爸,这个小车也可以给他们家宝宝玩哈 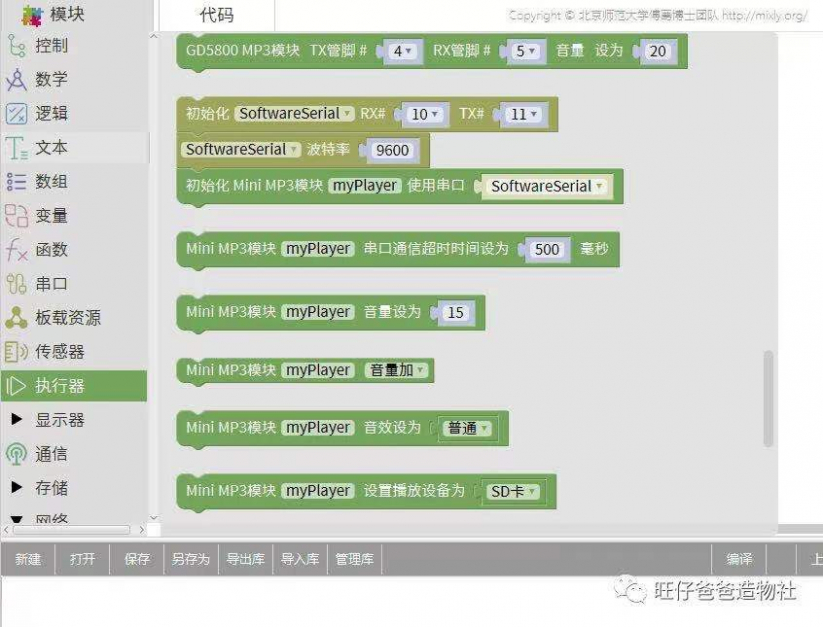 具体初始化的程序如下图所示,这里的MP3模块与esp32之间使用的是软串口通信的方式,注意接线时MP3模块和esp32需要交叉接线,也就是RX-TX,TX-RX  细心的伙伴肯定会有疑问,第几首歌曲是怎么回事呢,需要怎么设置,这个问题问的非常好,MP3模块全名叫DFPlayer Mini MP3模块,此模块是可以插一个micro sd卡的,我们要播放的歌曲放在这个sd卡中,MP3模块可以读取大部分格式的音频文件,但歌曲文件设置时歌曲需要按照“0001”这样的数字编号命名,并将所有歌曲放置在sd卡中文件名为mp3的文件中,这些准备工作设置好后就可以愉快的使用了,程序中的第4首歌曲为鸣笛的声音,初始化程序中播放的第5首歌曲为汽车启动的声音,另外需要注意的一点是,MP3模块播放歌曲的程序最好不要放在循环里一直执行,这样需要增加等待时间才能听到歌曲,可以放在某个函数中,满足条件执行就可以了 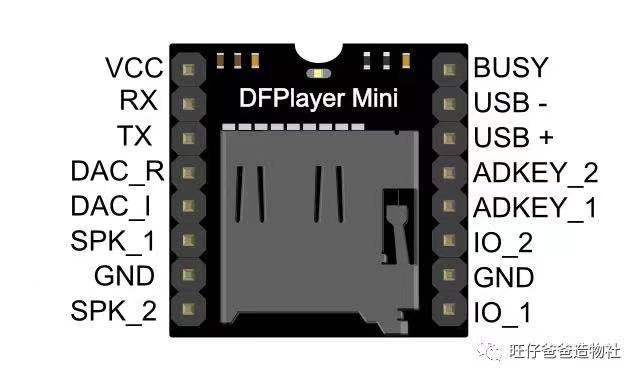 接着我们来探究“眨眼睛2”的自定义函数,眨眼睛其实就是对WS2812灯带的控制,程序如下图所示 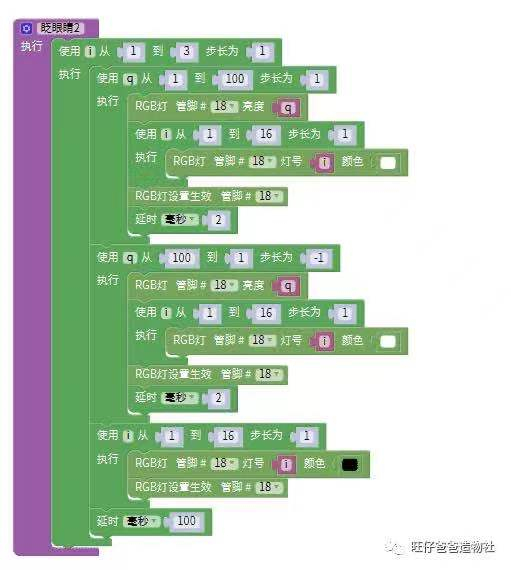 上面的程序看不懂也没关系,我们来看一个最简单的例子,通过下面的程序我们可以让一串有16颗灯珠的灯带全部亮红色 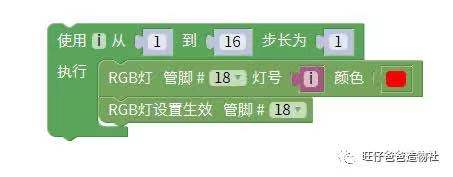 控制灯带的程序块在左侧模块的“执行器”中选择 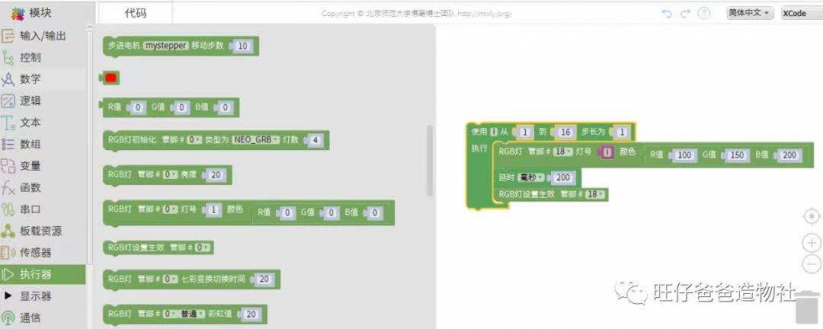 当然初始化程序也是必须要有的,如下图所示 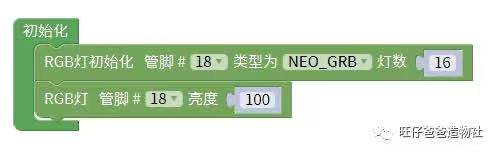 如果把颜色改成黑色,呈现的效果就是熄灭所有灯珠  除了可以使用已经内置好的颜色以外,我们还可以通过RGB的色值来调色,理论上有256*256*256那么多种颜色,程序中还可以加入灯带的延时显示的时间让灯带有流水的效果  理解了简单的例子后,我们回过头再来看“眨眼睛2”的自定义函数就很容易理解了,从前面的讲述中我们可以知道,当V4虚拟引脚接收到数据时,也就是“Blynk”移动端V4这个按键被按下时,会发出鸣笛的声音,同时让灯带展示眨眼睛的效果,此时的自定义函数“眨眼睛2”就是让灯带亮白灯,并且有“忽闪忽闪”的效果,怎么样才能有“忽闪忽闪”的眨眼睛的效果呢,那就需要对灯带的亮度进行调节了,所以程序中先让灯带亮白色,并且亮度是由1-100逐渐变亮的,接着亮度再由100-1逐渐变暗,最后熄灭,这样渐渐变亮再渐渐变暗的过程重复执行了3次 自定义函数“眨眼睛2”掌握后,我们还有另外一个“眨眼睛”的自定义函数,原理是一样的,只不过灯带亮的是红色,一起来看一下“眨眼睛”的自定义函数程序 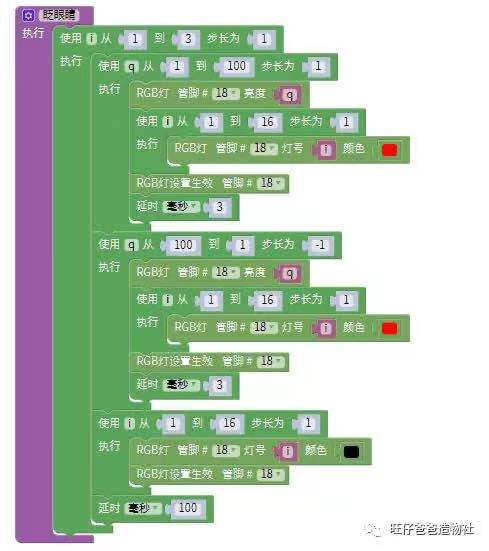 “眨眼睛”自定义函数理解了后其他的灯带程序就简单多了,比如下面的程序是检测V6虚拟引脚为“1”也就是ON时就亮白色的灯,相当于汽车晚上开的灯光,相反为“0”时也就是OFF时就灭灯  通过上述对ws2812灯带和MP3模块的介绍,相信大家对于丰富多样的灯带显示效果和MP3播放会有很多想法,期待大家去实现自己的想法哦 灯带和MP3的程序讲解我们就告一段落,接下来我们了解舵机的转向程序 舵机转向程序使用V2虚拟引脚来控制舵机转向,我们需要在左侧模块栏“执行器”中找到控制舵机的程序块 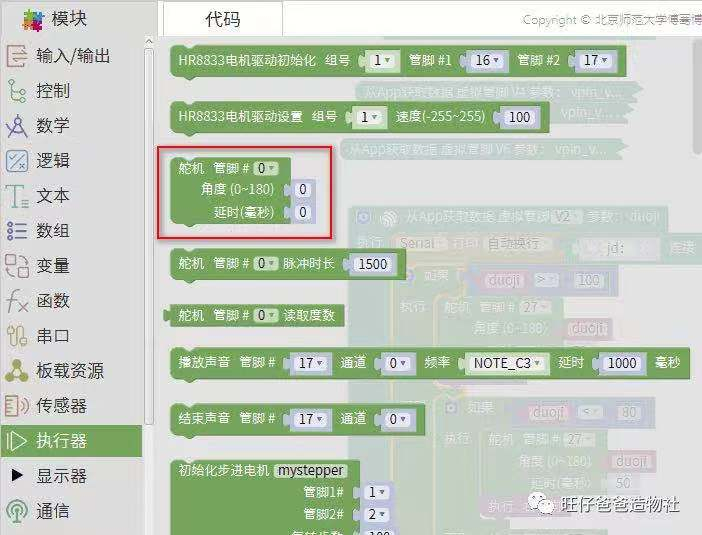 接着可以尝试编写如下程序,当V2虚拟引脚接收到移动端发来的数据后做2件事情,第一件是通过串口监视器打印接收到的数据,第二件事情是让舵机以接收到的数据旋转至相应角度 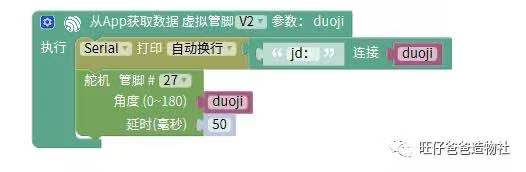 为了车子能够正确的转向,经过测试,舵机的角度设置范围在60-120度之间比较合适,默认状态为90度,也就是默认直行,角度在91-120之间为左转,同时灯带执行左转向的程序,角度在60-89之间为右转,同时灯带执行右转向的程序,需要注意的是舵机安装在车子底盘上,测试时需要将车子反过来,在设置左转还是右转的角度时要以车子正面朝上的方式调节哦,防止调节反了,改进后的程序如下图所示  上述程序中涉及到了两个自定义函数,分别是“左转向”和“右转向”,下面我们对这两个自定义函数展开介绍一下,和之前的灯带显示程序类似,我们把16颗灯珠分成了左边8颗和右边8颗,我们以驾驶人坐在小车上的角度定义,左边的8颗灯珠编号为1-8,右边的8颗灯珠编号为9-16   当车子需要左转时就控制左边8颗闪烁起到示意转向的作用,这里对于灯带转向的效果参考了奥迪车转向灯的设计,呈现出了一种由里向外的流水效果  下面是“右转向”的自定义函数,与“左转向”的函数类似,只是灯的编号不同  前进后退程序 转向程序掌握后,我们来了解让车子前进后退的程序,车子的前进后退由V0虚拟引脚控制,程序分成3种情况处理,分别是前进“forward”,后退“backward”和停止“stop”,V0虚拟引脚的数值范围是0-100,当数值等于0时车子停止不动,也就是执行“stop”自定义函数,当数值大于51时执行前进“forward”自定义函数,当数值小于49时执行后退“backward”自定义函数 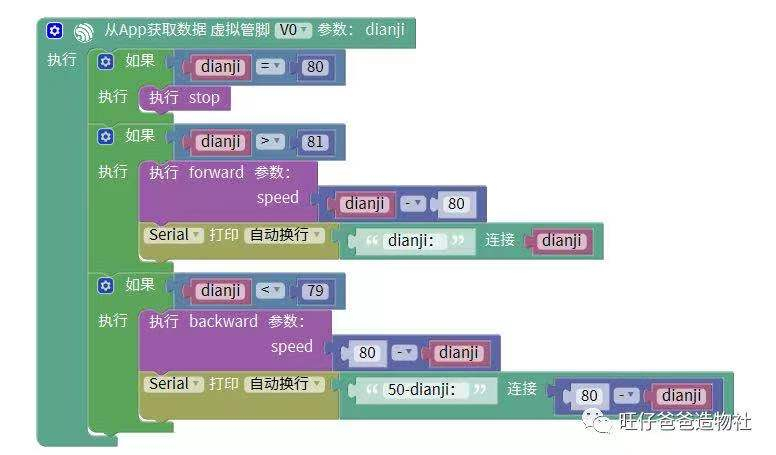 为了让车子能够调速,我们使用了大功率的电机驱动板,控制车子前进后退和调速的方式也很简单,两个数字管脚的高低电平变化控制电机正转和反转,从而让车子前进和后退,一个模拟管脚来调速,为了保证车子的安全性,我们让车子的速度不超过80  后退 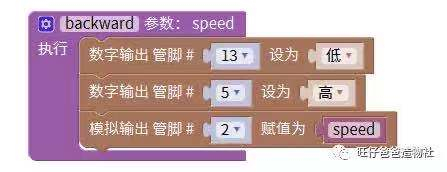 前进 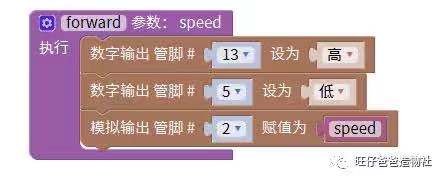 停止  通过下面的动图来看一下上述程序的测试效果   最后是音乐播放的程序,我们使用V5虚拟引脚的状态来控制是否播放音乐,当V5虚拟引脚的数值为“1”,也就是ON时,开始随机播放音乐并且执行“向内流水”的自定义函数,当V5虚拟引脚的数值为“0”,也就是OFF时停止播放音乐  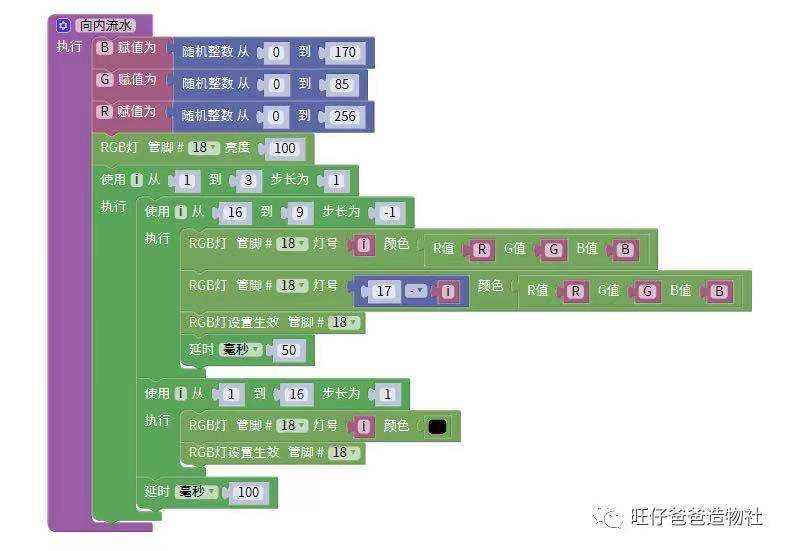 有的伙伴会问有“向内流水”肯定会有“向外流水”吧,确实有的,“向外流水”的效果以红色呈现,在车子启动时展示   最后我们来看一下完整程序,由于程序很长,部分已经介绍过的程序旺仔爸爸就折叠起来了 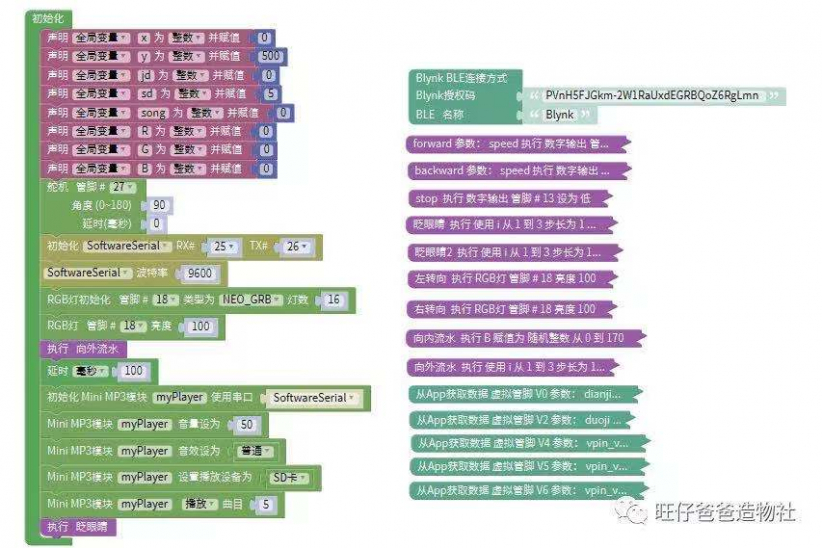 #小结# 此次“溜娃神器”作品使用的锂电池并没有进行续航能力的实际测试,需要测试后给出参考数据,在作品改造过程中遇到了转向舵机和行驶电机不能同时工作的情况,经过裘老师帮忙,最后发现是esp32的引脚选择错误,这个经历告诉旺仔爸爸还要更全面的掌握主控板的各种参数 另外,本次设计制作来源于生活中的一次经历,作品改造的过程也让旺仔爸爸学到了很多知识技能,这次的项目涉及到了很多之前未接触过的知识,为了完成项目就需要带着问题去探索学习,把它掌握,与被动的接受书本知识相比较,以完成项目功能为目的去学习新知识,知识体系会更加的牢固,水平提升更快,总结一下就是,生活处处皆学问呀,细心观察,深入思考,尝试改变,保持终身学习的心态,从生活中来,到生活中去 欢迎有更多志同道合的奶爸奶妈一起交流,共同提高,也欢迎对本文批评指正,提出宝贵意见 更多精彩内容请关注旺仔爸爸造物社公众号  造物让生活更美好,期待下一次与您相逢 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






