|
10539| 6
|
[教程] Raspberry Pico尝鲜之GPS轨迹记录仪 |

|
本帖最后由 沧海笑 于 2021-2-13 12:16 编辑 【项目故事】 Raspberry基金会在2021年新年伊始就推出了树莓派第一款单片机产品:Raspberry Pico。主控芯片是英国树莓派设计的RP2040,这是一款双核ARM Cortex M0+ 处理器,时钟高达 133 MHz,载有264KB 的 SRAM 和 2MB 的板载闪存。IO方面提供26 个多功能 GPIO 引脚。2×SPI, 2×I2C, 2×UART, 3×12-bit ADC以及16个可控制 PWM 通道。PICO的亮点还有8 路可编程 I/O (即:PIO) 状态机,用于自定义外设支持。美中不足是 PICO的USB接口仍然为USB 1.1而非Type-c,有网友戏称,这是树莓派有多少库存配件需要消化啊。  我在第一时间关注到了这款新板子,出于对树莓派长久的喜爱,虽然PICO从硬件配置上并不比esp8266/esp32占优,也没有wifi和ble,但我对树莓派社区非常有信心,也迫不及待地想尝鲜、做一个新玩具。 由于PICO推荐用micropython以及c++开发,我对前者的IDE以及一些入门库比较熟悉,所以我决定用micropython做一个gps轨迹记录仪。 这个小玩具的知识点不超过五个,上手难度属于较易上手,自认为难度★★(如果设定★★★★★为高难),是供树莓派以及嵌入式玩家尝鲜以及全面了解认识PICO的一个不错的项目。 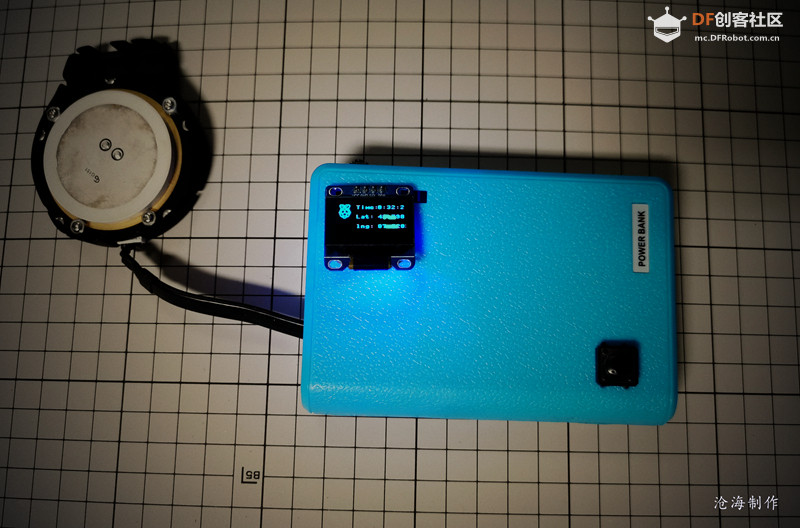 该项目从构思、搭建原型到代码编写、调试,装配外壳以及路测验证,大致经历了一周多时间,这也是一个完成度较好的小玩具。下面我们一起来做吧。 【硬件准备】
 部分零件: 1、800mAh锂电池 2、电源管理模块(充电、放电、电量显示、开关) 3、5.5~3.3v电压转换模块 4、微触按钮 【软件准备】
【制作过程】 (一)整体设计思路 使用Gps模块采集坐标以及时间数据,通过uart传送至pcio,Pico负责解析为经纬度以及时间变量,根据按钮的控制来进行gpx文件的存储。存储结束后,将记录文件导出,利用在线解析工具进行轨迹解析和展示。 人机对话方面:本装置设一块oled(128*64)用于监测gps数据以及存储情况。按钮1用于用户控制存储、停止流程。按钮2用于用户控制装置电源的开、关。 (二)硬件接线图 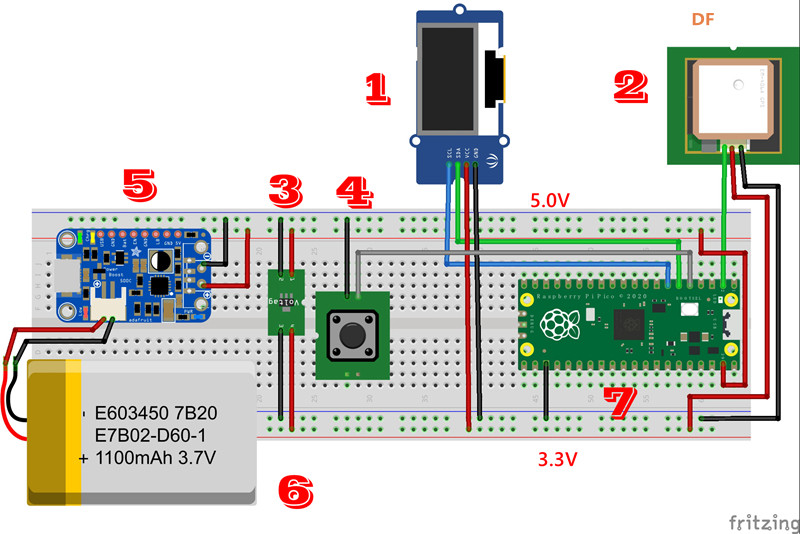 图中: 1、 OLED 128*64 2、 大疆悟1GPS模块 3、 AMS1117-3V3,5.0~3.3V转换模块 4、 存储控制按钮 5、 电源管理模块 6、 锂电池(本项目实际使用800mAh) 7、 Raspberry Pico开发板 由于fritzing从元件库中提取,所以带有个别商家logo。 (三)关于大疆悟1GPS模块的接线分析 我从网上淘到一只大疆悟1的gps模块。因为在以往接触gps过程中,饱受搜星慢、用户体验差之苦。这块大疆悟1的gps模块用于无人机导航,天线口径足够大(直径46mm),根据其用途定位而言,该模块应该在定位、寻星、启动方面有不错的表现,事实证明这个猜测是正确的。模块到手后,看到了模块分为两部分:模块本体以及屏蔽底壳,屏蔽底壳对于无线信号系统的正常工作非常重要。大疆gps模块的线材也是屏蔽多股铜线,用料扎实。美中不足就是这款模块用于diy的资料非常有限,一是模块输出不清楚:一共六根输出线,且全部是黑色,无法从颜色和排序上获得参考。二是供电电压不了解,m8n的供电是3.3v没问题,但是我不知道这款模块是否自带电压转换电路。首先在背板上发现了gnd铜焊盘,而且两个焊盘是开窗的(没有用阻焊油封闭),所以很容易通过对线找到了两根(第2、6)是GND线,或者我们理解是和GND接通的。有了这个GND定义就好办了,至少不会在测试中烧模块。实际上我们只需要三根线(VCC,GND以及TX),经过反复测试,顺利找出了这三根线(如图)。后来在谷歌上也找到了两张国外玩家的拆解图,证明了我的分析。关于供电电压,我先用3.3V进行测试,工作正常。我就没有再尝试提高电压。后来在国外玩家的拆解图(不一定是悟1的)也看到了供电电压是3.3V~3.6V,进一步印证了我的分析。至此,这两个问题都得到了解决。由于是拆机件,没有带原配螺丝。我用M2的螺丝+螺母以及一个M3的螺母做垫片,基本上解决了屏蔽底壳的固定问题。我把vcc,gnd以及tx用排针引出,并且在接头处做了热缩处理,就可以开始后续的gps部分测试了。 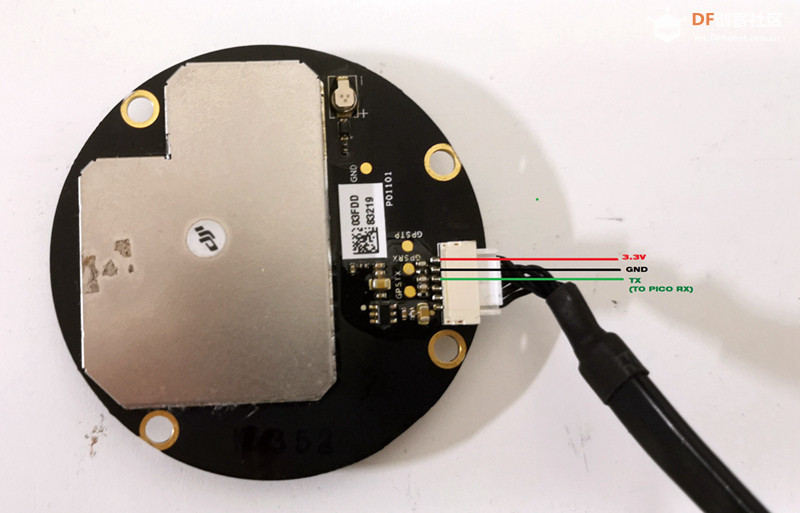  (四)软件框图及代码 使用Thonny ide过程中,需要安装pico板解释器,类似的教程网上很多,不在本文讨论范围内。本文末尾附上了相关的配置文件。请注意:pico需要Thonny的版本在3.3.3及以上。 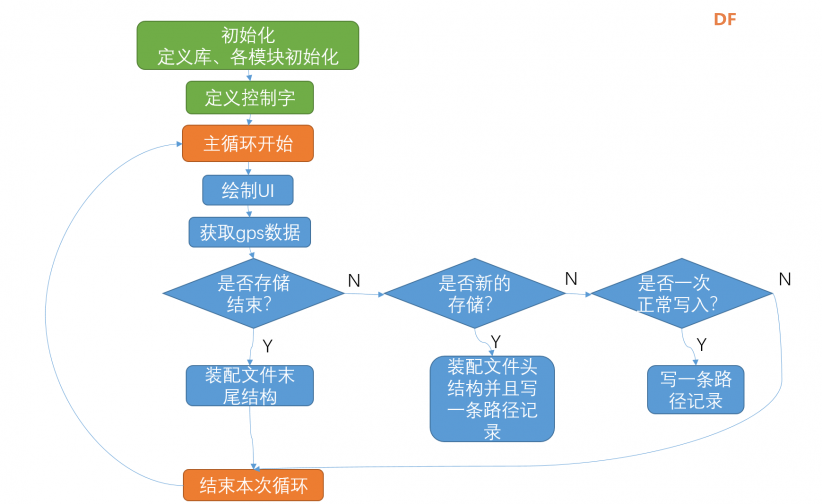 (五)软件知识点以及解决过程 1、GPS的NMEA-0183库的解析、记录在pico上的移植和实现 大名鼎鼎的micropyGps库是Micropython在github.com上评分最高的一款解析库,借鉴了著名的Arduino下的解析库tinygps++。最初是为pyb板子设计的,我在esp32上移植过,没有问题。这次在pico上也比较顺利。固件采用1-25发布的1.13版,在后续1.14版上有些不稳定,只能待后续micropyGps升级了,毕竟这个库已经几年没有更新了。 2、Ssd1306 I2Coled屏幕在pico上的实现,以及图片显示功能实现 使用了官方的ssd1306驱动库,在认真阅读库并且尝试解决了i2c的表述后,也顺利点亮。主要使用到了亮度调整、字符显示等功能。目前默认只有一种字体及大小,如果自定义字体需要进行字模的设计,这个话题留待以后再讲。本项目解决了pico显示图形的问题,我用了一个树莓派黑白LOGO图标,转换为32*16的黑白png文件,然后利用Micropython.org上网友提供的转换工具(在文末一并分享),将png文件转换为字节数组,直接在程序中调用即可,由此,本项目中显示了一个可爱的树莓派32*16的logo。玩家也可以根据自己的需要进行图形展示,甚至一些汉字(图形方式)的显示。 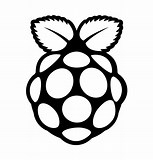 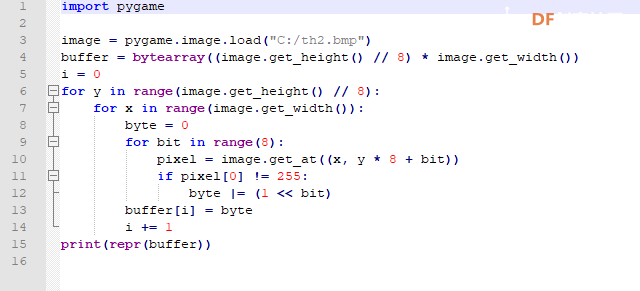 3、button陷阱单击以及长按功能在pico上的移植和实现。 这个button陷阱库很棒,可以单独开一个线程侦测按钮的触发,我只做了一处修改,将原示例当中的led.duty修改为led.duty_u16,即可通过。 我用此库作为GPS坐标点(路径)的存储、停止控制,所以我设计了三个状态控制字(新建、存储以及停止),采用button陷阱的单击进行控制和切换,非常方便。在软件框图中有详细解释。 4、gps轨迹的记录(开始、终止)为gpx格式,并且在适当的工具上进行解析和展示。 gpx文件的实质是一个拥有gps坐标(经纬度、海拔(也可以不要这个参数)、时间戳)等内容的xml文件。找到了标准的gpx文件格式后,将文件头、文件尾进行拆离。在存储过程中将文件头、文件体的正常存储、文件尾装配在一起,就形成了完整的gpx轨迹文件了。解析展示方式有很多种,有离线工具(如微软商店里面的GPX查看器)、在线工具等。都可以方便地对所记录的轨迹进行展示。下图是一个gxp文件示例:  (六)基于蓝牙HC-05的面包板验证原型、调试程序 由于我的工作台离窗边比较远,为了方便调试,我用了一组HC-05蓝牙模块,主从方式设置后形成了蓝牙串口的透传,将gps数据通过这组HC-05模块传送到工作台的pico这一端。方便了调试工作,示意图如下: 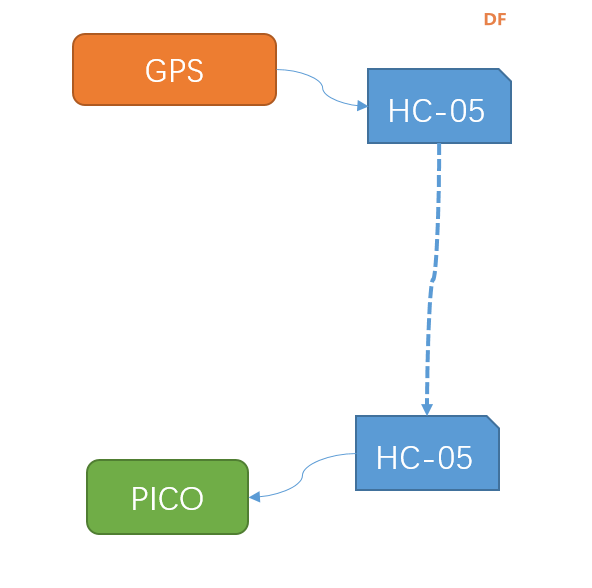 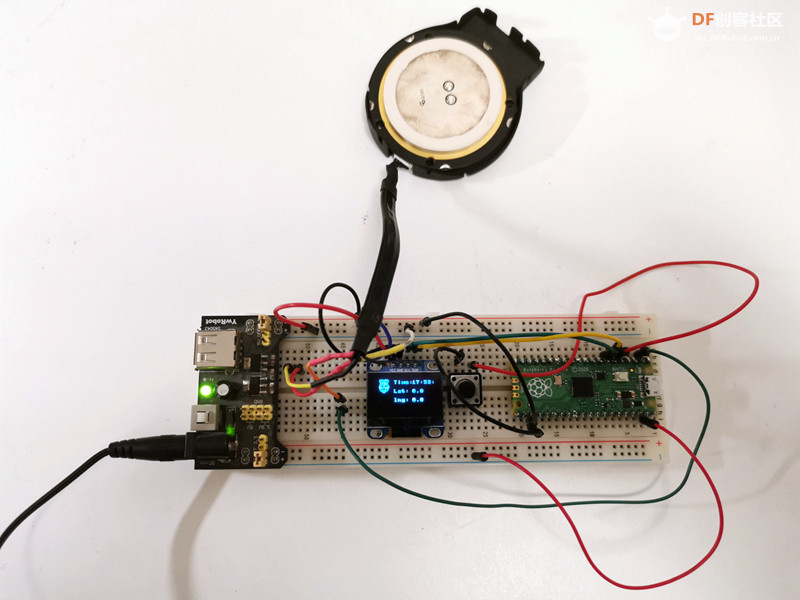 蓝牙模块是串口透传,设置好主从后就没问题,所幸大疆悟1的GPS模块的输出也是9600波特率,节省了非常多的调试时间。 (七)成品制作过程 1、外壳准备 在搭建完面包板原型后,春节临近,物流快递陆续不发货了。所以就暂时没有考虑3D打印外壳。手里有一块亚克力面板,是上次其他小制作时激光切割的剩余存货,可惜没有找到合适的铜柱。只好放弃。但是找到了吃灰已久的充电宝DIY套件外壳,尺寸非常合适,面板上有一个开孔适合OLED的引出,两个侧面的开孔可以方便电源模块的type-c以及gps模块的引线进入外壳。于是就选定了这个外壳作为本记录仪的外壳。美中不足(也是特点吧)就是外壳一旦扣紧实在咬合太紧,所以把一些咬合部分做了打磨处理,把外壳内一些影响安装的部分也做了拆除。只是对两组按钮进行了打孔,整个外壳就可以用了。  2、电源管理模块的安装 本次使用的电源管理模块是集充放电管理、type-c与电池连接、5V输出以及key键唤醒一体的模块。体积也比较小,标称输出电流2A,还有电量显示功能,是一块性价比很好的电源管理模块。由于本项目中oled以及gps都是3.3v供电,实际上PICO本身有3.3v外供电端子,但是为了不增加pico的外供电负担,我还是选择了一块1117电源转换IC作为5-3.3V的转换,这样在本项目中将提供两个电压,5V给树莓派PICO供电(采用VSYS端子),3.3V给OLED以及GPS供电,稳定的供电是非常重要的,这样考虑也是不希望给PICO过大负担。将电源管理模块的KEY端子与5V输出的负极相连接,短击可唤醒电量检测以及供电,双击则关断电源输出。将一个微触开关引出在外壳侧面,用于电源控制。 3、Pico、按钮以及OLED屏的安放 Pico我焊接了排针,所以将两列排母焊接在洞洞板上,就可以很好固定pico。按钮在外壳上开孔(用游标卡尺实测尺寸)后,就可以稳定安装在外壳上,oled屏幕也是用了排母,将排母用热熔胶固定在外壳顶板即可。这样oled模块可以方便装卸。 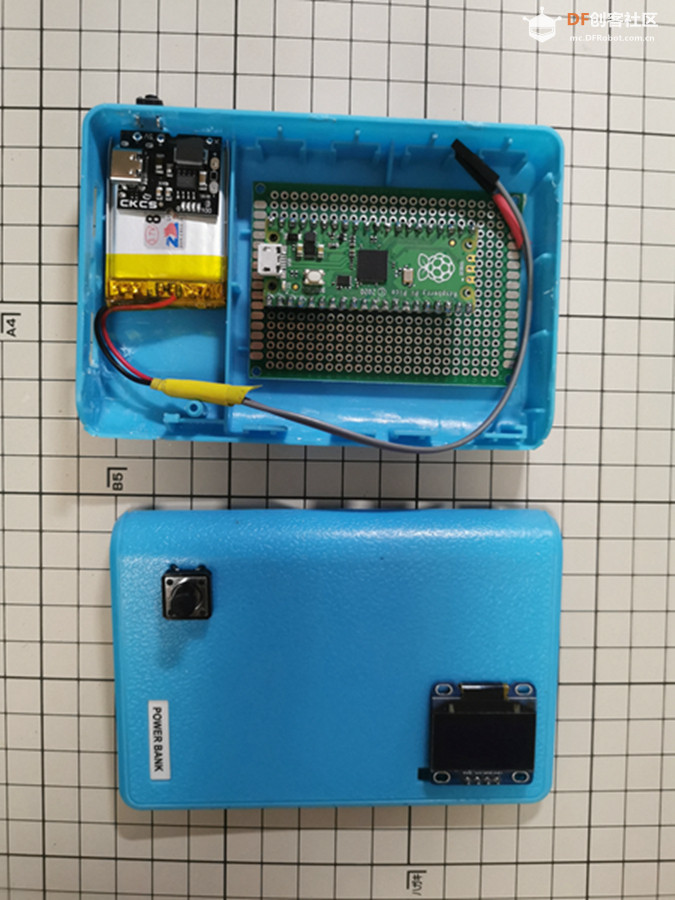 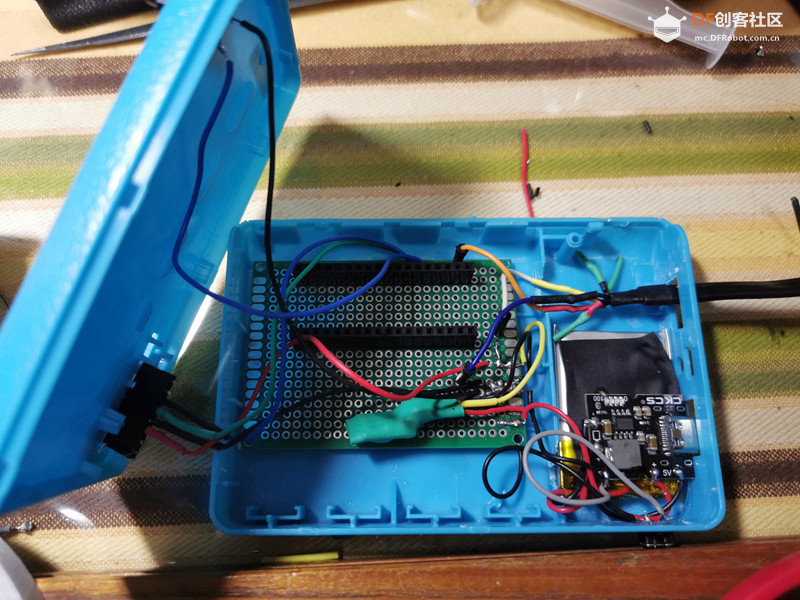 4、整体安装以及路测结果 整体的安装和焊接工作比较简单,由于接线比较简单,所以也没有绘制PCB板,用一块洞洞板作为底板,在板子的端部做了5.0V/3.3V/GND等三组母线,便于各元器件引用。元件之间的飞线在接头处都用了热缩处理,按钮、OLED屏幕以及洞洞板与外壳固定用了热熔胶。当然在全部调试后再固定,否则会很麻烦。我就经历了这样一次麻烦。 整体安装后,在窗台进行了测试,开机-存储-停止-再存储等功能均正常,记录到的gpx文件,也可以正确在解析工具上解析,至此就可以进行路测了。 开车路测很顺利,大疆的GPS模块名不虚传,开机后在几十秒内就可以定位,然后进行存储,开车大约半小时,将路径解析后,表明整个装置工作正常。 我使用了两个网站进行解析,第一个网站是基于百度地图的https://www.cyclingroad.cn/gpx/index.html,第二个网站是基于卫星地图https://www.sunearthtools.com/cn/tools/gps-view.php,只需要把GPX文件拖到页面上就可以解析了。 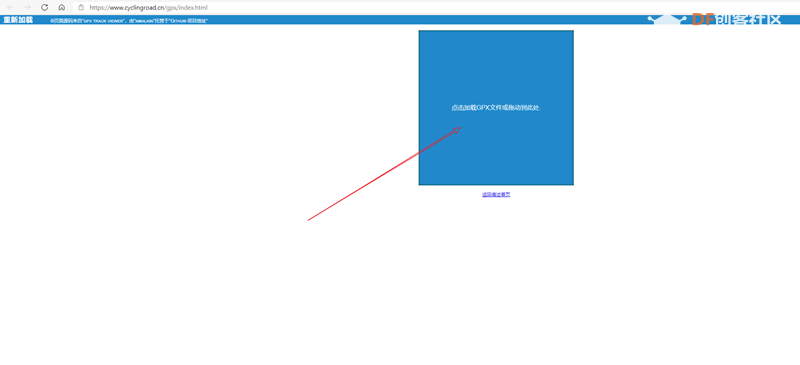 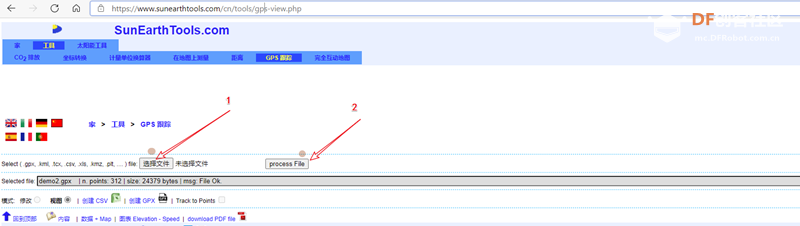 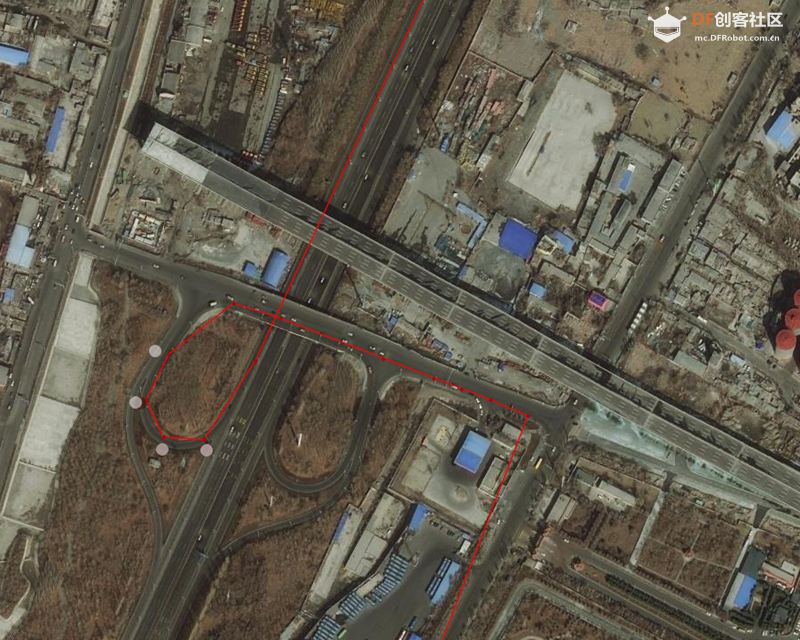 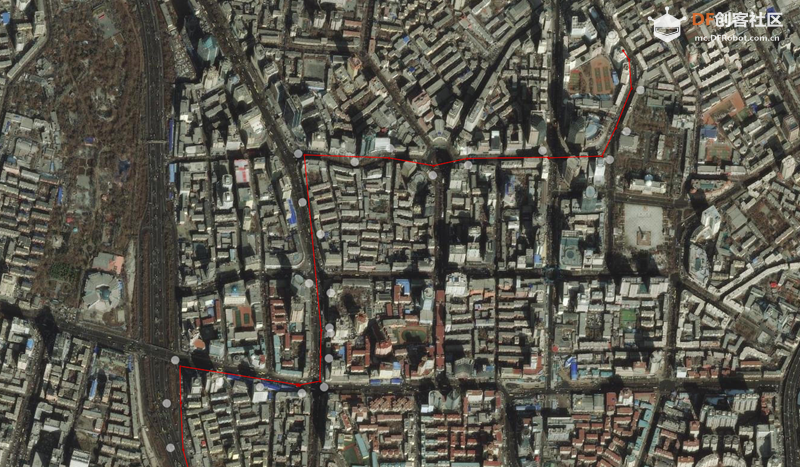 【小结】 1、合理善用旧物料。我们在diy多年后,都或多或少积累了一些线材、模块、外壳等,合理善用,一方面减少吃灰,另一方面改造也带来了不同的乐趣。 2、将搜集到的软件库进行适当修改完善,就可以用到新玩具上。micropython发展很快,一些适配于不同板子、不同时期的库,需要进行适当完善,这需要有一定的库代码阅读能力。 3、往往我们能想到的点子,在github上大多已有思路和实践,我们注意搜集这些信息、善用资源并且记得向作者点亮星星并且注明引用位置。 感谢dfrobot.com.cn提供交流平台,感谢raspberry不断创新。感谢giuhub.com这座宝库。 大年初一,牛年已至,祝新春大吉。 沧海抱拳。 本文用到的代码、工具、库均作为附件分享。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







