|
4397| 0
|
[官方教程] 【MaixPy 教程】用mixly玩转K210——人脸追踪 |
【MaixPy 教程】用mixly玩转K210——人脸追踪
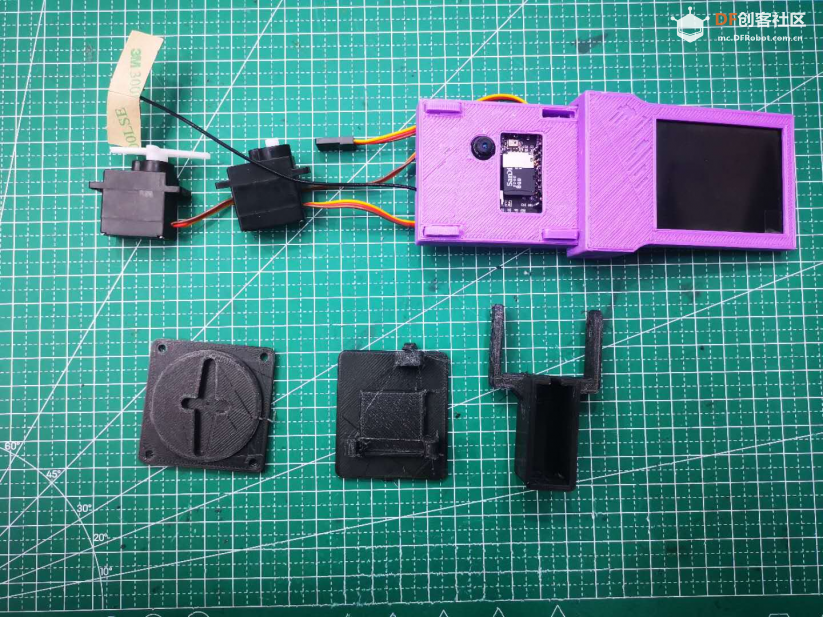
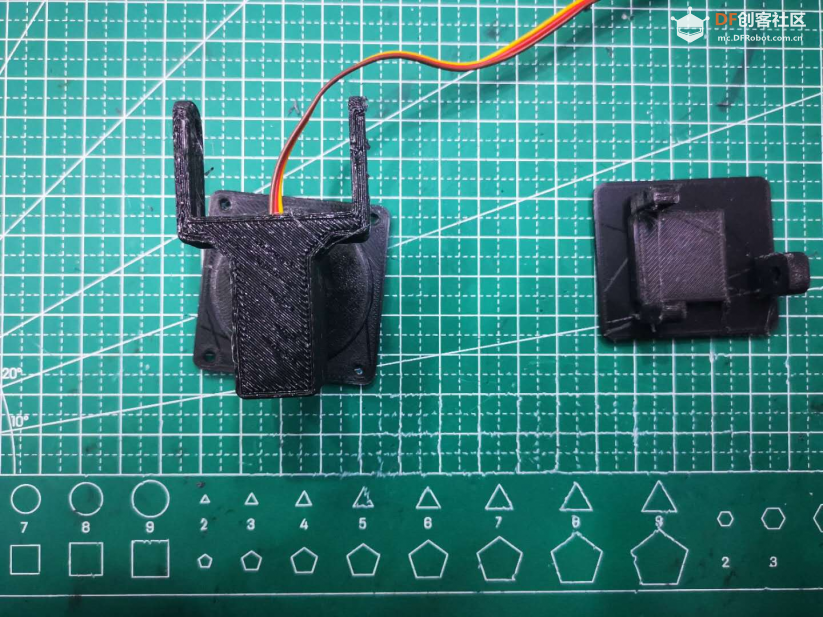
准备阶段所需要材料
我们将底部舵机的信号线连接至dock的16脚,第二个舵机的信号线连接至17脚。(如果连接反,后面的动作会异常,交换两根线即可【mixly中自己重新写入了io-17、io-16】)
程序编写刷入人脸检测模型人脸模型可以在maixhub下载或者百度网盘下载(链接: https://pan.baidu.com/s/1007krAq_oZspySxmnAVPkw 提取码: caeg 复制这段内容后打开百度网盘手机App,操作更方便哦)
下載好模型,用kflash_gui把人脸检测模型刷入到dock的flash的地址:0x300000。(或者是将模型文件保存到TF卡中)
人脸检测1、首先将我们的摄像头、显示屏、和KPU进行初始化后,获取摄像头的图片,用yolo2运行网络积木块,获取图像的信息,返回一个字典(我们需要用到的是"x",“y”,“w”,"h"等键所对应的值)。具体操作如下:
2、标记人脸部分,在机器视觉指令中找到绘制矩形和绘制十字积木块、用矩形解析积木块将code中i数据解析后的"x","y","w","h"显示在屏幕上,具体操作如下:
人脸追踪首先我们需要定义两个定时器和初始化兩個舵机
我们的摄像头的帧大小是320 * 240,我们需要对检测的摄像头检测到不同位置的脸,采取不同的操作:看下图:
如果人脸的中心x位置小于150,让水平舵机 变量X轴 = X轴 -2,如果人脸中心的x位置大于170,让水平舵机 变量Y轴 = Y轴 + 2.如果人脸中心的Y位置小于110,让水平舵机 变量Y轴 = Y轴 +2,如果人脸中心的Y位置大于130,让水平舵机 变量Y轴 = Y轴 - 2,再结合舵机角度的范围进行判断。具体程序如下:
注: 程序演示 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed












 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






