|
6253| 0
|
和12岁小同志搞创客开发:遥控舵机 |
机缘巧合在网上认识一位12岁小同志,从零开始系统辅导其创客开发思维和技巧。  之前讲到了设计一款亮度可调节灯,在此基础上,实现旋转电位器控制舵机转动。  1、舵机控制理论 控制舵机转动,本质上也是PWM(脉冲宽度调制),通过一个固定的频率,给其不同的占空比来控制舵机不同的转角。 舵机的频率一般为频率为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms~2.5ms范围,来控制舵机不同的转角,0.5ms~2.5ms的PWM高电平部分对应控制180度舵机的0~180度。 以180度角度伺服为例,那么对应的控制关系如下所示: 0.5ms-------------0度 下图演示占空比从1ms变化到2ms时,转角的变化:  在设计一款亮度可调节灯中使用旋钮电位器ADC采样数值的范围是0~1023之间,但是舵机可接收的旋转角度是:0~180度,故建立转换关系:  当旋转电位器ADC数值为0时,带入公式,舵机旋转度数为0;当旋转电位器ADC数值为1023时,舵机旋转度数为180。 遥控舵机程序设计如下所示: 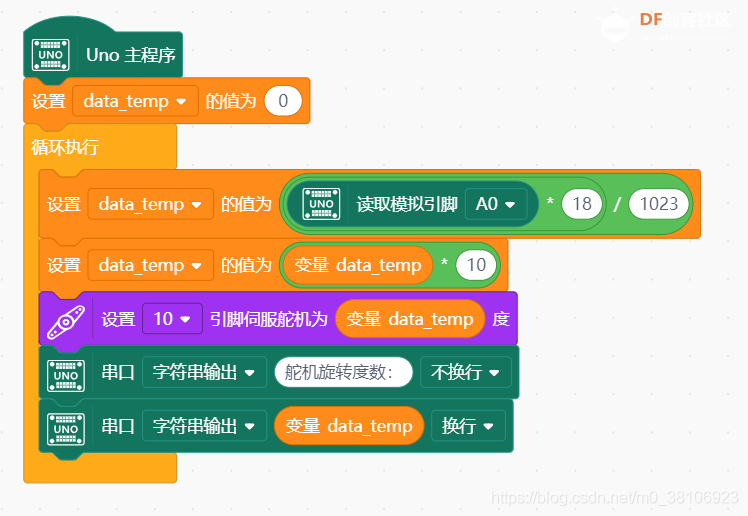 效果如下所示: 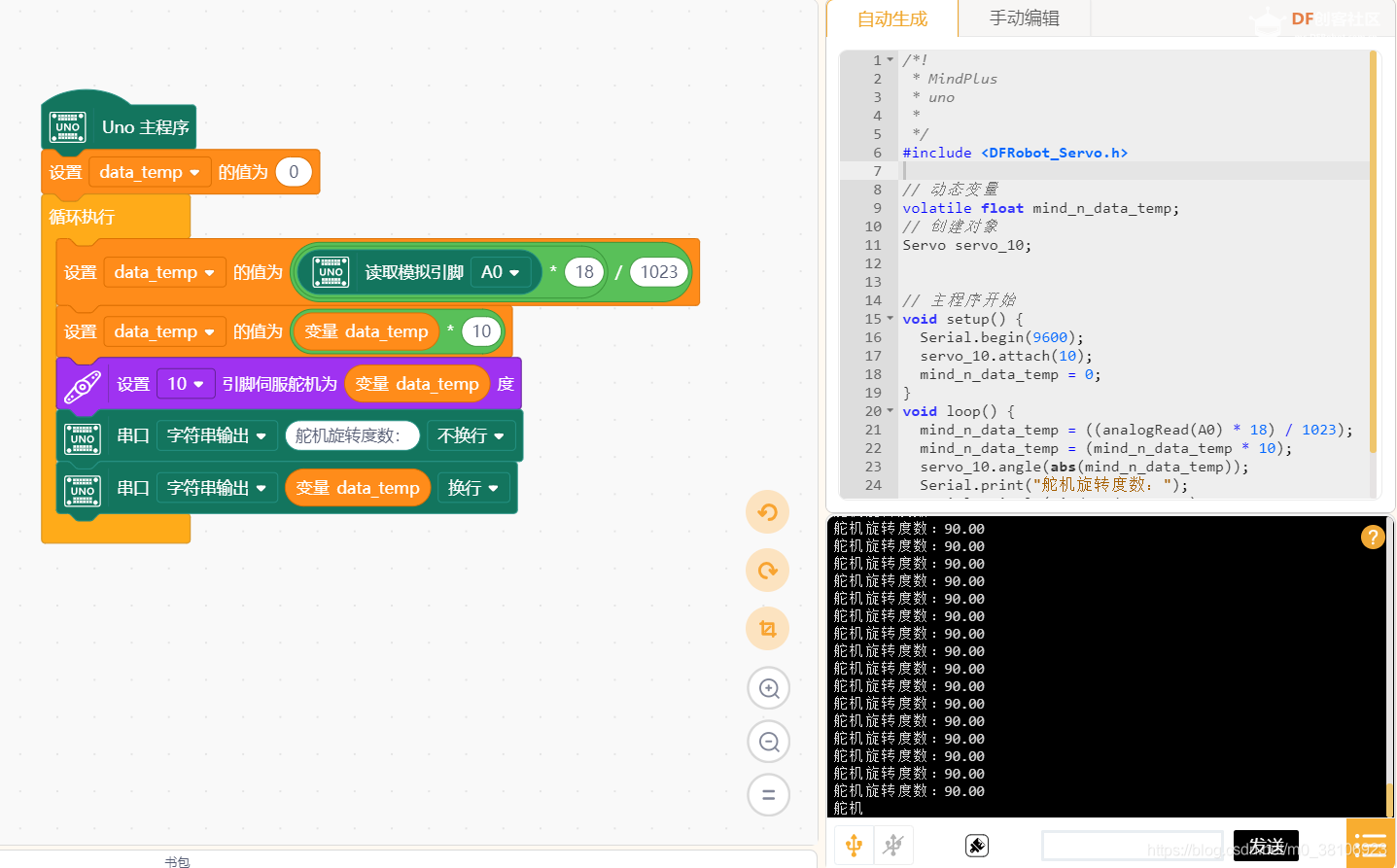 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






