|
6788| 3
|
关于我用树莓派摄像头和麦昆小车在公司冒险这件事 |
|
最近在网络上看到一句话,让我感触颇深: “你看那些,牵着手说着笑,通往厕所的身影,看那一堆人抱怨着,畅想着。看几个人大笑着吃着泡面的场景,你看,那是我们回不去的青春。” 游戏手柄,遥控小车。这些在小时候的玩具,总是能把我带回当年情境中去。想起当年在夕阳下的奔跑,那是我逝去的青春。 我始终认为,兴趣是最好的老师。我最近喜欢上了树莓派,虽然树莓派对于新手却并不太友好。但是,不妨碍我热爱它。把玩了一下之后,我决定用树莓派做一个监控小车,但是初学树莓派的我,直接使用树莓派做一个小车,有点不太现实。所以,我就把监控小车分为两个部分,即:树莓派负责监控,小车部分使用的麦昆小车作为驱动部分。 一、准备材料 1.硬件材料: 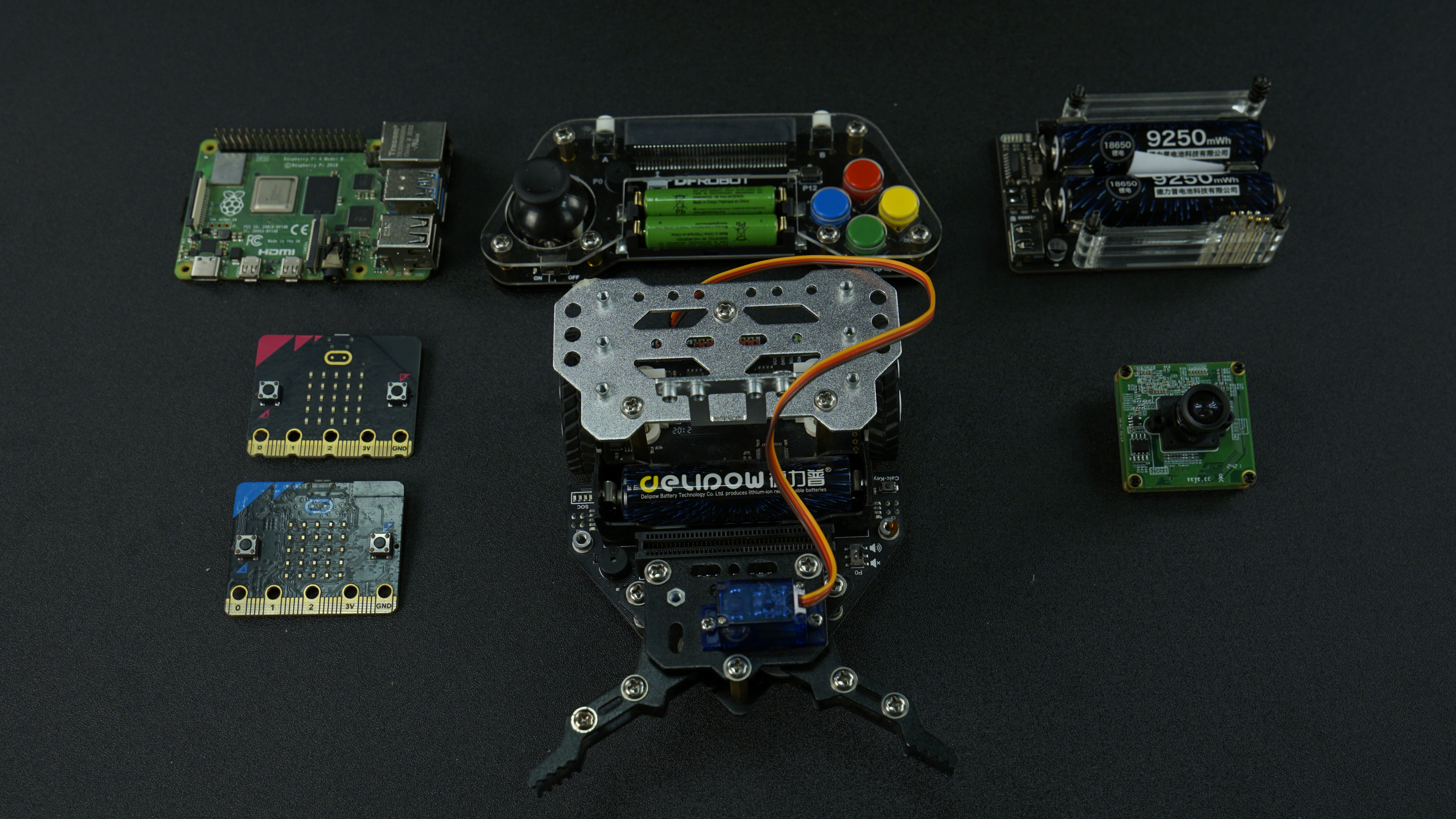 2.装甲合体 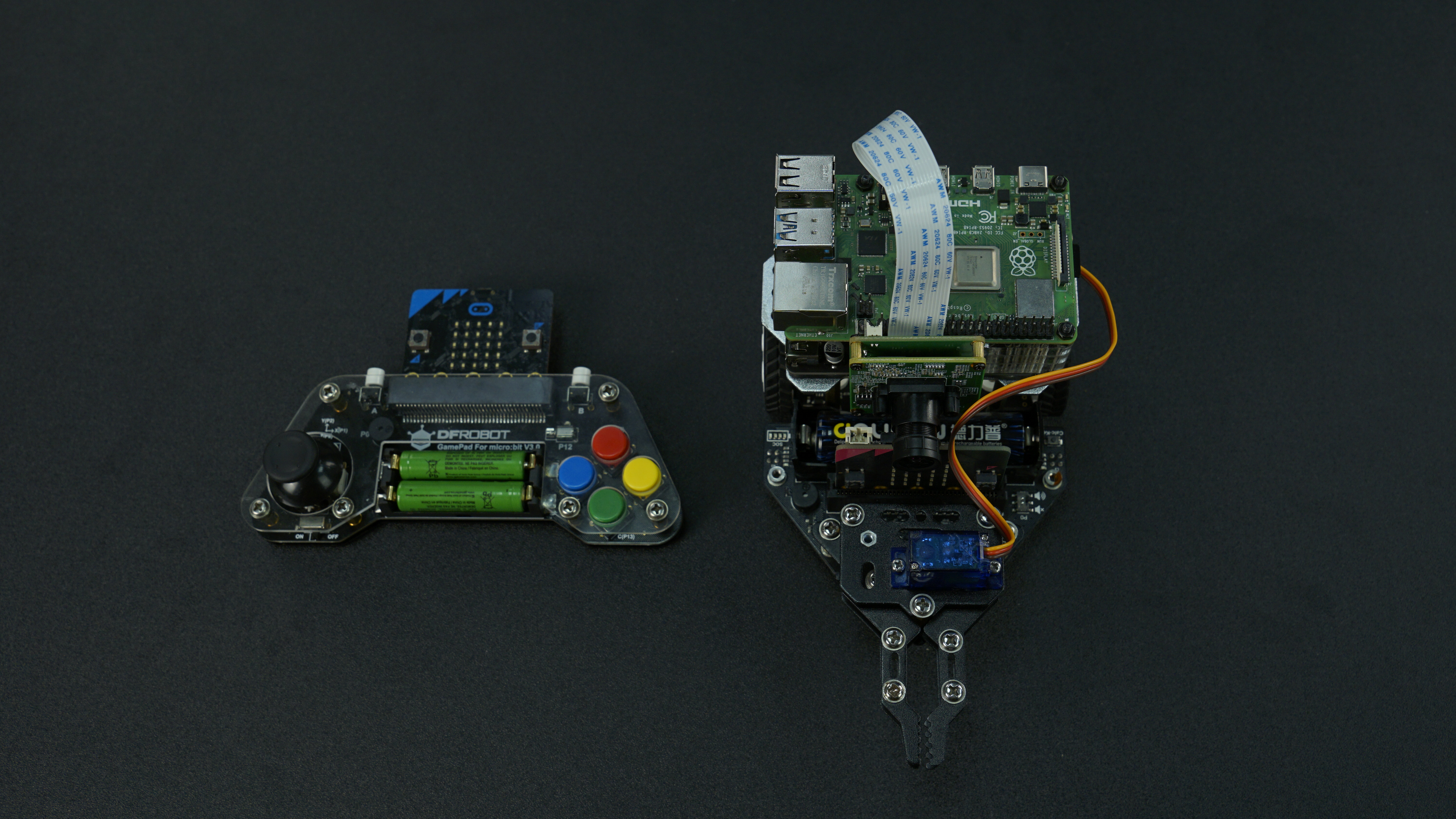 二、配置树莓派摄像头 1.树莓派系统安装及配置 具体安装树莓派系统方法请参考官方文档,详见:Install raspberry guide 接通电源后,树莓派系统启动,初始化树莓派系统中Camera和I2C都处于未启用状态。开机后我们需要将其手动打开, 执行命令:sudo raspi-config 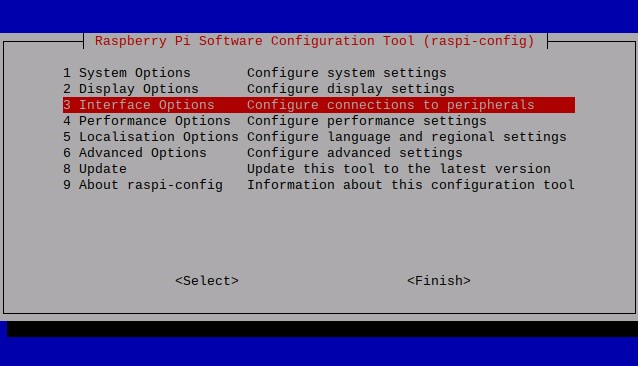 进入选项3,启用Camera和I2C,然后点击Finish。 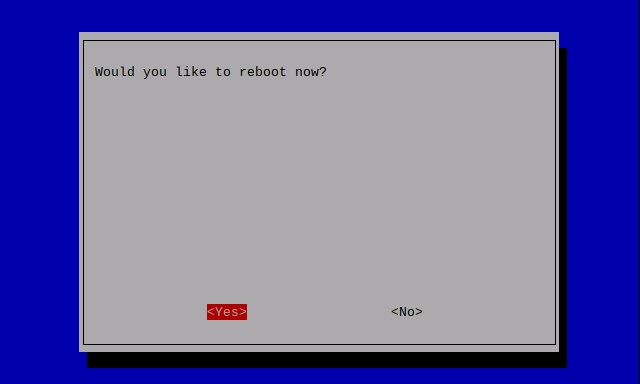 选择<Yes>完成重启。 建议启用树莓派系统的ssh服务及samba服务,这里不在赘述树莓派系统如何开始ssh和samba服务 2.树莓派安装软件包
cd raspberrypi/veye_raspcam/bin/
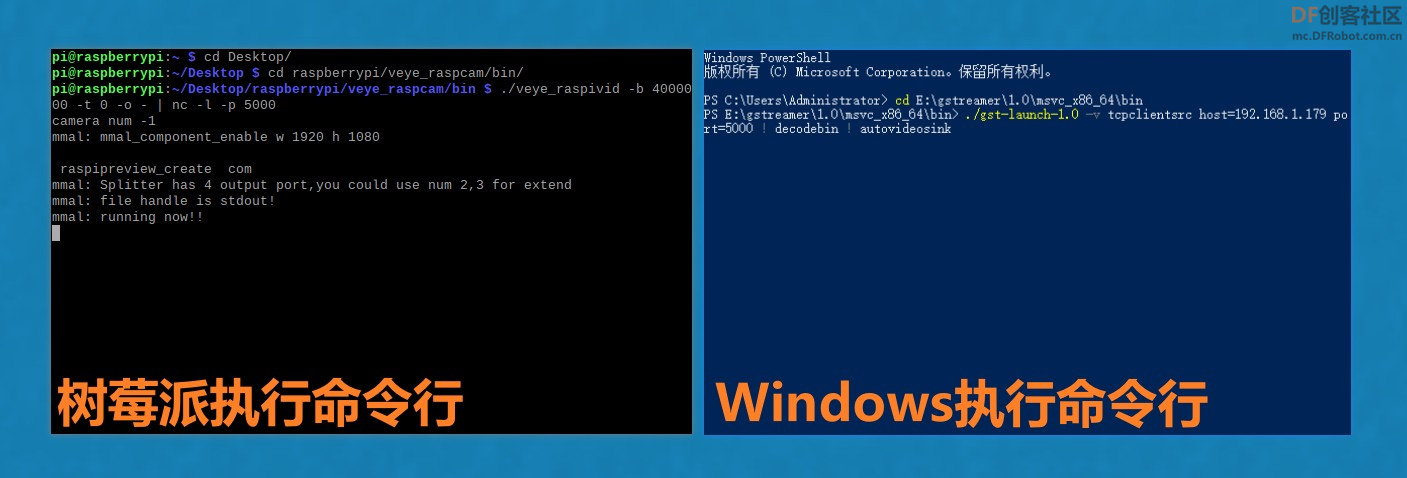 5.显示效果展示  三、配置麦昆小车部分 1.介绍麦昆 麦昆,是一款面向创客教育的图形化编程机器人,继承了micro:bit可玩性和上手简单的特点。支持makecode图形化编程,支持基于mind+的图形化编程及python编程,所以它对与初学者特别的友好。巡线、氛围灯、I2C接口,舵机专用接口,机械扩展螺孔等.......功能齐全,扩展性强。本次我们用到的功能很少,后续大家再做的时候,可以发掘一些其他的好玩的玩法,加一些好玩的功能进来。 2. microbit手柄遥控麦昆 本例程中,我们通过程序将模拟摇杆设置为开关量,用于控制小车前进,后退,左转,右转。右侧的上下按键控制工程队的舵机运动, 左右按键(D、F按键)控制左右车灯的亮灭。 麦昆lite上安装了工程队-夹持器,接在舵机接口S1上。使用C和E按键对其进行控制。 程序连接 小车端程序连接:点击进入小车程序链接 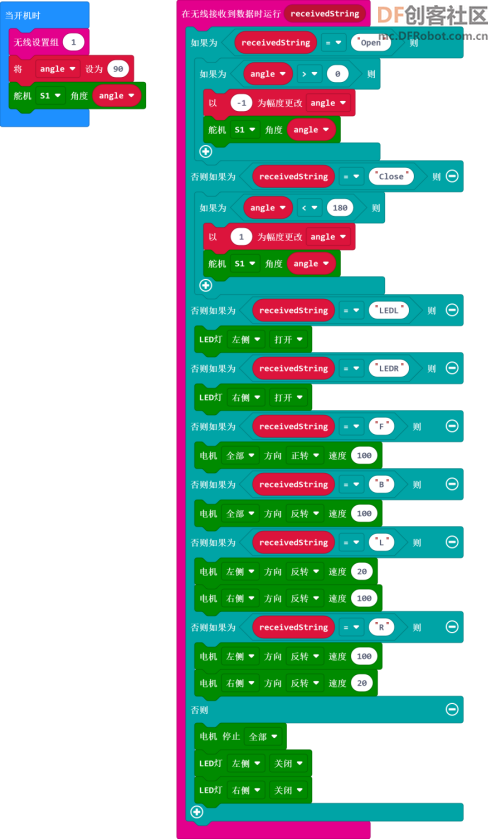 手柄端程序链接:点击进入手柄端程序链接 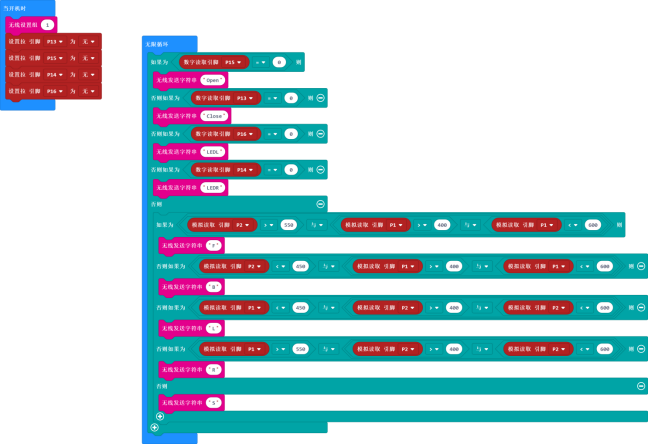 运行效果: 运行程序,拨动摇杆,麦昆执行方式如下:  四、总结 整个小应用完成下来十分的简单有趣,本次做的小应用,实现功能单一,操作十分简单。在后面学习了更多关于树莓派的的知识后,会对这个小应用不断的升级、完善。后期会直接使用树莓派对小车进行控制,树莓派监控方面也会有相应的更改和提升。初次使用树莓派,做的不好的,多多包涵。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









