|
5185| 5
|
0编程做一个会打招呼的智慧欢迎萌宠,新手友好!!! |
|
美好的一天,从愉快地打招呼开始!今天给大家分享一个会打招呼的智慧欢迎萌宠! 注:本项目来自DFRobot美貌与智慧并存的突突老师。 先来看看萌宠本萌!  啊,不是,拿错胶卷了。重来! 全体同学!看懂掌声!(此处应有BGM) 屏幕前吃鸡腿的这位同学,没错,就是你!请你来回答,萌宠都会什么欢迎招式? 不知道?那我来说! 一、功能分解 1.有人靠近并且与萌宠击掌,萌宠挥手并说你好; 2.有人和萌宠牵手,则亮彩灯 3.有人吹气,则转动小花。 什么?你问我怎么做的? 就是这样这样,再这样就好了呀!(手动狗头保命) 好了,不皮了!上正经教程!-------------------------------------(这是一条正经的分割线) 二、材料准备 1.硬件清单 运动传感器、声音传感器、按钮模块、电导开关、电源主板。  舵机、舵机零件包、舵机控制模块、录放模块、电机、电机控制模块;灯带模块、彩色灯带(固定颜色);  逻辑与、分支模块、持续模块块、阈值模块、鳄鱼夹。  2.装饰材料 多色硬卡纸、两张硬纸板(本项目的硬纸板尺寸约为125X35cm,ps:快递盒上拆的,环保!)多色超轻粘土。 3.其他材料 迷你充电宝、硅胶导线、USB数据线、铜箔胶带、圆形双面胶、铅笔、记号笔、剪刀、美工刀、泡沫胶或双面胶(拼贴萌宠用)。 注:圆形双面胶是用来固定硬件的,也可以用其他胶,但为了保证硬件整洁,建议尽量使用便于去除的胶。 三、制作步骤 (一)构思与规划 1.选择萌宠的造型,设计大小。可百度“拼贴卡纸动物手工”,选择你喜欢的造型。要作出项目中的效果,需选择身体圆润、有手的动物造型。    2.规划各部分零件的位置 (1)参考成品,规划各部分的位分布置 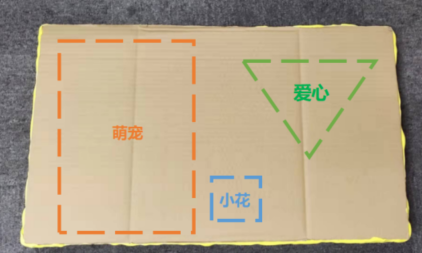 (二)制作萌宠与小花 1.材料:多色硬卡纸、铅笔、记号笔、美工刀、泡沫胶或剪刀,铜箔胶带、美工刀。 2.步骤: (1)按照选定的造型,在卡纸上描出萌宠造型各个部分的轮廓; (2)沿着轮廓,裁剪卡纸; (3)将剪好的卡纸,按照头部、身体与四肢分成两类; (4)根据选定的造型,使用泡沫胶将头部、身体与四肢的卡纸分别拼贴起来; 注意:萌宠的右手需要活动,因此右手不和身体拼贴在一起。小花制作步骤与萌宠相同。 (5)在手掌位置贴上铜箔胶带  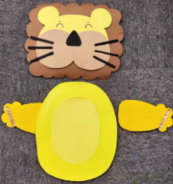 (6)造型加固。在萌宠各部位加上硬纸板,防止萌宠变形、损坏。具体步骤如下: a.拿出另一张硬纸板上,分别描出萌宠的头部、身体、手臂的大致轮廓(比这些部位小一点,不用描花边),使用美工刀裁下来。 b.在萌宠各部位的背面,粘贴裁好的加固纸板。   (三)功能实现 1.有人击掌+靠近—挥手+语音打招呼 (1)功能描述:当有人靠近并击掌,萌宠挥手,说你好。 (2)材料:运动传感器、按钮模块、电源主板、录放模块、舵机模块、舵机零件包、舵机控制模块、逻辑与模块、分支模块、硅胶导线、充电宝。  (3)连线图: 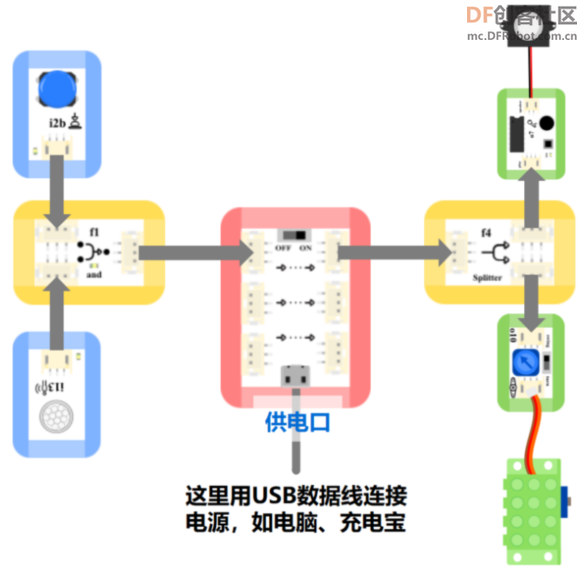 注: a.电源主板的同一排接口是一路电,主板两边的模块要连在同一排。 b.舵机控制模块拨到swing模式,蓝色旋钮可以调节舵机摆动的范围。 (4)安装舵机臂,带动萌宠手臂。 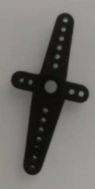   (5)录放模块 它可以录制10秒以内的声音并播放出来。具体使用方法是:长按录音按钮,对着麦克风说话,说完后松手,即完成录制。当收到高电平,则可以放出录音。 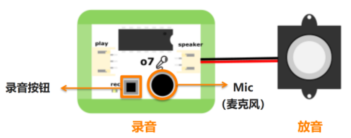 (6)逻辑与模块 逻辑与模块可以进行简单的逻辑运算。  它能将两个输入的信号处理后,合并输出成一个信号,其输入输出机制如下: 当一端或两端输入信号为低电平时,逻辑“与”模块输出“低电平”; 当且仅当两端输入信号为高电平时,逻辑“与”模块输出“高电平”。 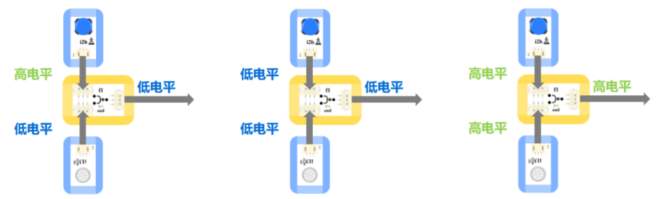 注:左边分别是按钮、运动传感器输入到逻辑与模块的信号,右边是逻辑与合并输出的信号。 (7)分支模块 分支模块能够将一路输入信号扩展为两路相同的输出信号。  当输入信号为“低电平”时,模块两端输出都为“低电平”; 当输入信号为“高电平”时,模块两端输出都为“高电平”。 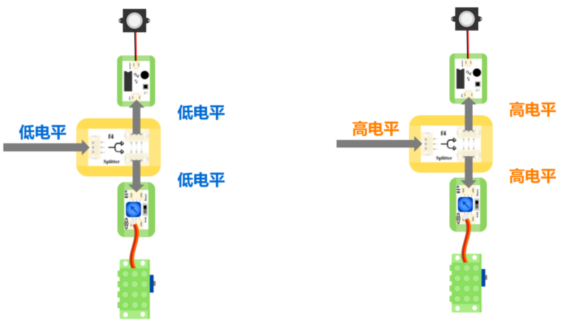 传感器类似于人的五官,用来感知信息。执行器类似人的四肢,用来执行动作。这里的传感器就是按钮、运动传感器,让萌宠感知信息;这里的执行器就是舵机、录音模块,让萌宠能做动作、能说话。 (8)原理概述:当有人靠近,运动传感器输出高电平;当有人击掌,按钮模块输出高电平,如果有人靠近并击掌,那么逻辑与模块就会合并输出一个高电平,经过电源主板、分支模块,这个高电平会被分别输出到录放模块、舵机中,从而实现萌宠的挥手、语音打招呼功能。 2.有人牵手—亮灯 (1)功能描述:如果有人和萌宠牵手(同时牵两只),亮灯。 (2)材料:灯带模块与彩色灯带、电导开关、鳄鱼夹。  (3)连线图: 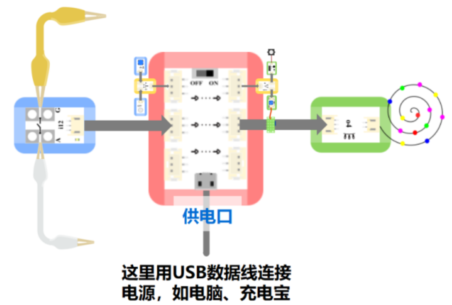 (4)原理概述:此功能是利用人的导电性完成的。人和萌宠牵手时,会触碰到能导电的铜箔胶带,此时电导开关就被接通了,于是高电平输入到灯带模块,最后灯带模块将高电平输出给彩色灯带,灯带亮。 3.有人发声—小花转动 (1)功能描述:当有人发声-小花转动。 (2)材料:声音传感器、电机、电机控制模块。 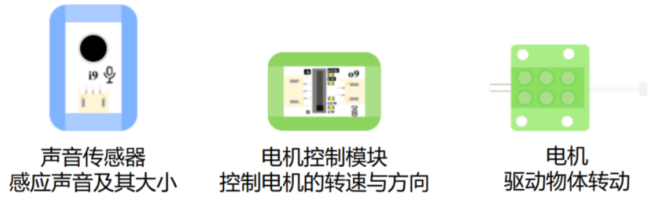 (3)连线图: 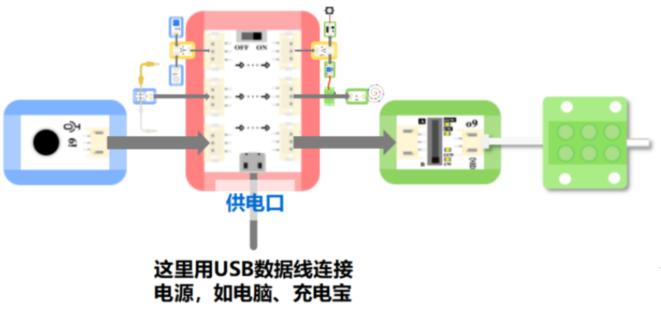 (4)原理概述:当检测到一定强度的声音,电机带动小花旋转。 4.优化 (1)增加挥手次数 测试后发现萌宠的手只摆动一下,就结束了。一般挥手打招呼,都会连挥几次,所以,又加上了持续模块。  当输入高脉冲后,持续模块会输出一个固定设置时间的高电平。换句话说,当有人靠近并与萌宠击掌时,可以通过持续模块让舵机多摆动几次。模块上的蓝色旋钮可以调节持续时间,持续时间越长,摆动次数越多。 加持续模块连线图: 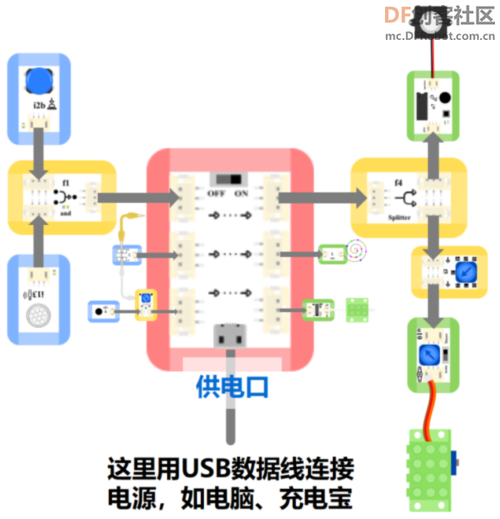 (2)调节声音传感器的灵敏度 测试发现,周围环境的杂音也会触发声音传感器,我们不需要这么灵敏,所以要加上一个阈值模块调解声音感应的灵敏度。  加阈值模块连线图: 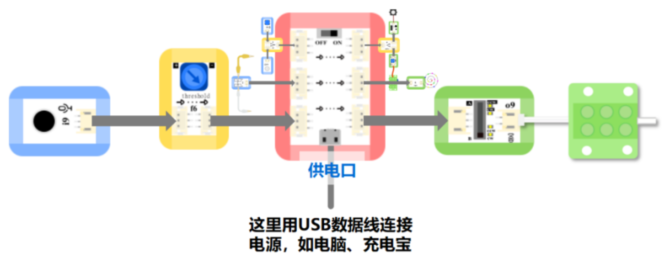 (四) 安装 1.装饰硬纸板 (1)材料:超轻粘土 (2)步骤:按照自己喜欢的颜色装饰就好啦~也可以参照项目中的搭配。 2.安装硬件 (1)材料:圆形双面胶、剪刀、铅笔 (2)步骤: a.规划好硬件位置。 (舵机要放在萌宠右手下方,需要根据萌宠右手的位置确定舵机位置。) b.将圆形双面胶剪成合适的大小,粘在模块中间的磁吸底上。 c.撕掉另一面胶,粘在硬纸板上。  注:左边上下两个圆球,是用来支撑萌宠的。 3.安装萌宠  看了这么久,不动手做一个? |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶












