本帖最后由 gray6666 于 2022-5-7 11:43 编辑
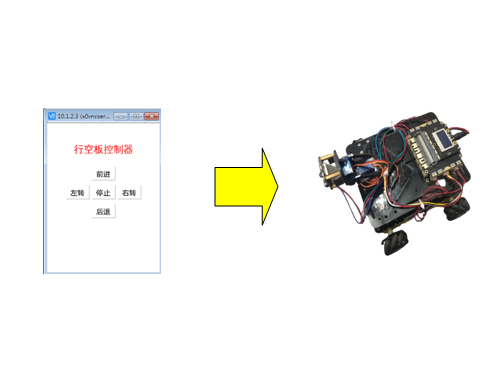
一、项目背景 随着小学信息科技的课程调整公布,高中信息技术老师也在对未来课程变化进行讨论?开源硬件,linux系统,物联网,人工智能,教学中经常会提到,但相关相关概念、知识点讲解枯燥无味,学生不感兴趣;行空板自带linux系统(未来信息技术教学的新趋势)和siot服务器,python语言,各种库更是一站式配齐,行空板作为信息技术实验室建设必备利器应该会有一席之地。 本次案例利用行空板作为siot服务器和操控端设计界面,分享热点,物联小车按照指令运动。
二、项目用到的python库 行空板已安装好unihiker库和paho-mqtt 客户端库,上手即用。 1.unihiker库:行空板首发,图形界面开发利器,再次特别感谢开发组各位成员。 为了便于行空板的使用,开发组开发了一个python库,名字为unihiker,将行空板需要而第三方python库没有或使用不便的功能集成与此库中,主要功能简介:为了方便屏幕显示和控制,我们在unihiker库中基于tkinter库封装了一个GUI类;为了方便麦克风和usb喇叭的使用,我们在unihiker库中封装了一个Audio类。
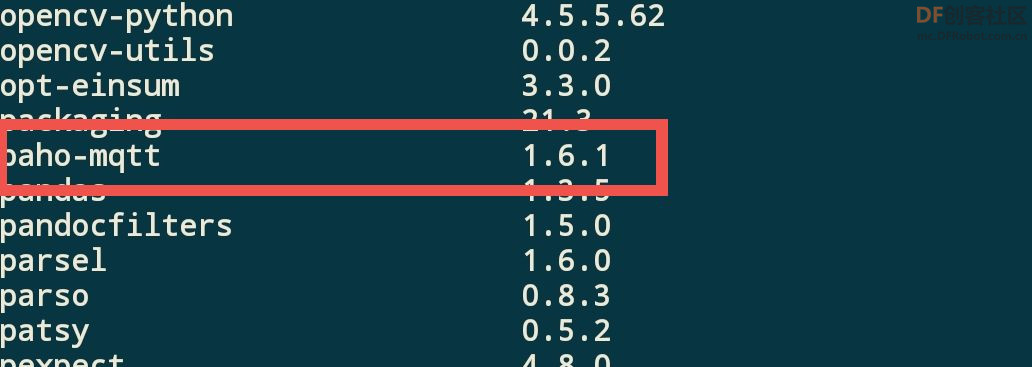
2.paho-mqtt库:目前 Python 中使用较多的 MQTT 客户端库,它在 Python 2.7 或 3.x 上为客户端类提供了对 MQTT v3.1 和 v3.1.1 的支持;使将消息发布到 MQTT 服务器变得非常简单。本次案例用该库实现行空板给SIOT服务器发送信息。 具体用法参考地址
三、实验硬件 1.行空板*1 https://www.dfrobot.com.cn/category-307.html 可参考我的另一篇帖子https://mc.dfrobot.com.cn/thread-312420-1-1.html
四、行空板设置 1.开启SIOT服务
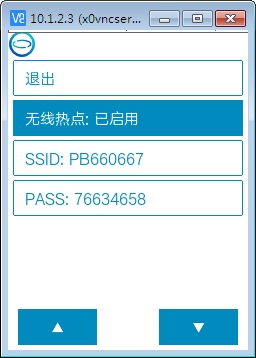
2.开启无线热点
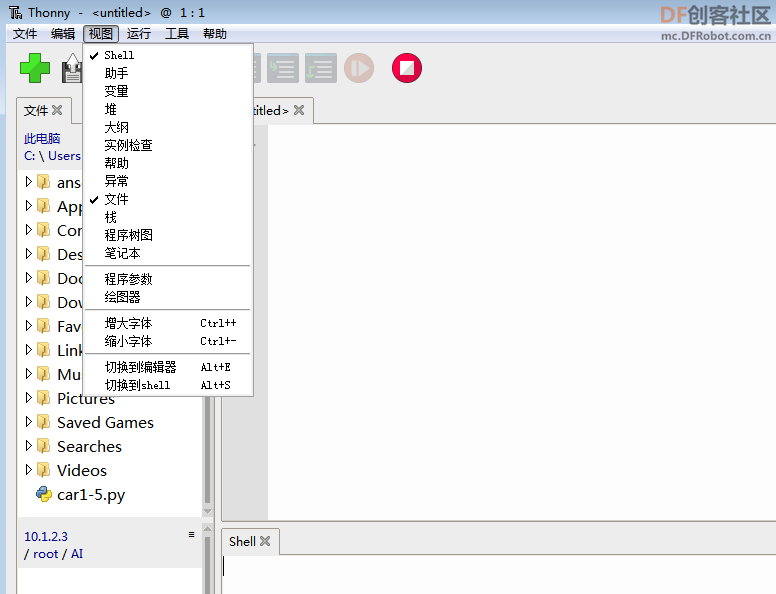
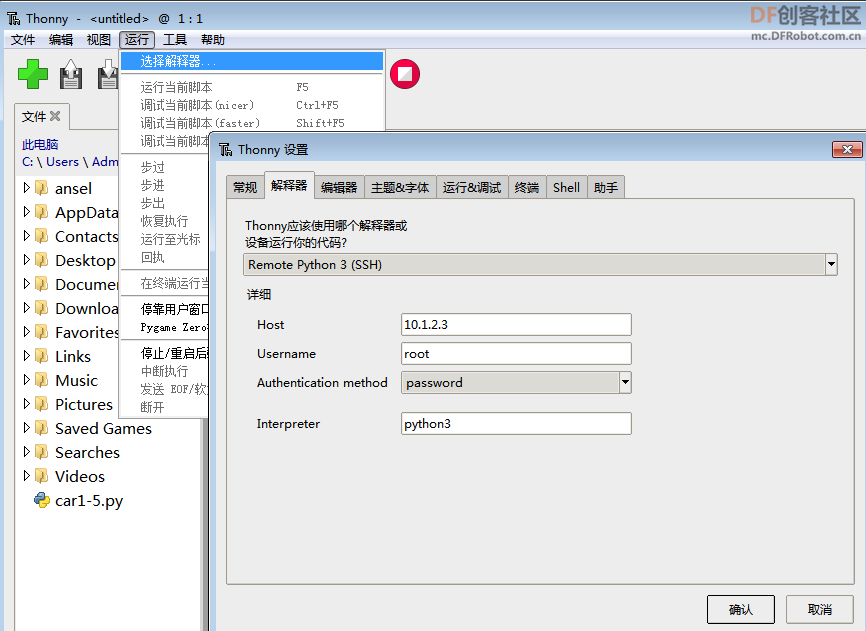
3.Thonny编辑器实现界面设计、编程测试 配置Thonny编辑器
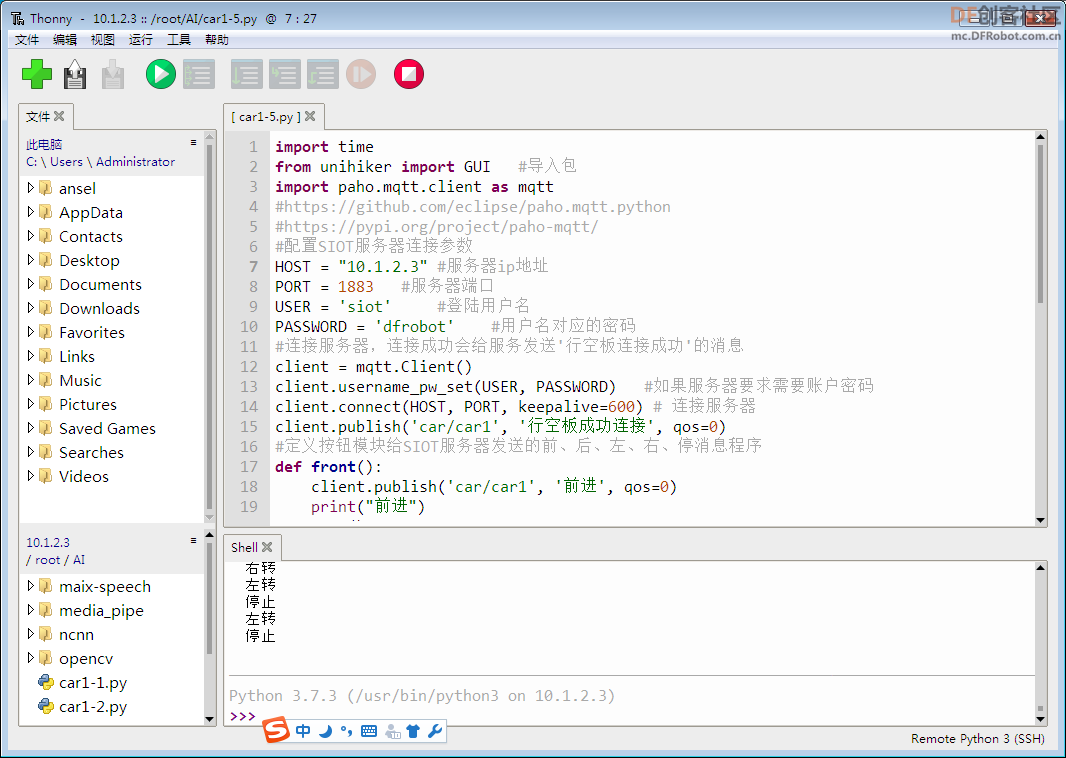
运行代码
python代码,大家可自行简化使用
- <font size="4" face="宋体">import time
- from unihiker import GUI #导入包
- import paho.mqtt.client as mqtt
- #[url]https://github.com/eclipse/paho.mqtt.python[/url]
- #[url]https://pypi.org/project/paho-mqtt/[/url]
- #配置SIOT服务器连接参数
- HOST = "10.1.2.3" #服务器ip地址
- PORT = 1883 #服务器端口
- USER = 'siot' #登陆用户名
- PASSWORD = 'dfrobot' #用户名对应的密码
- #连接服务器,连接成功会给服务发送'行空板连接成功'的消息
- client = mqtt.Client()
- client.username_pw_set(USER, PASSWORD) #如果服务器要求需要账户密码
- client.connect(HOST, PORT, keepalive=600) # 连接服务器
- client.publish('car/car1', '行空板成功连接', qos=0)
- #定义按钮模块给SIOT服务器发送的前、后、左、右、停消息程序
- def front():
- client.publish('car/car1', '前进', qos=0)
- print("前进")
- def back():
- client.publish('car/car1', '后退', qos=0)
- print("后退")
- def left():
- client.publish('car/car1', '左转', qos=0)
- print("左转")
- def right():
- client.publish('car/car1', '右转', qos=0)
- print("右转")
- def stop():
- client.publish('car/car1', '停止', qos=0)
- print("停止")
-
- #制作行空板控制端界面
- gui=GUI() #实例化GUI类
- gui.draw_digit(x=120, y=60, text='行空板控制器', origin = "center",color="red",font_size=15)#数码管字体显示
- gui.add_button(x=120, y=110, w=50, h=30, text="前进", origin='center', onclick=lambda: front())
- gui.add_button(x=40, y=150, w=50, h=30, text="左转", origin='left', onclick=lambda: left())
- gui.add_button(x=120, y=150, w=50, h=30, text="停止", origin='center', onclick=lambda: stop())
- gui.add_button(x=200, y=150, w=50, h=30, text="右转", origin='right', onclick=lambda: right())
- gui.add_button(x=120, y=190, w=50, h=30, text="后退", origin='center', onclick=lambda: back())
- #设置主程序
- while True:
- #增加等待,防止程序退出和卡住
- time.sleep(1)
- </font>
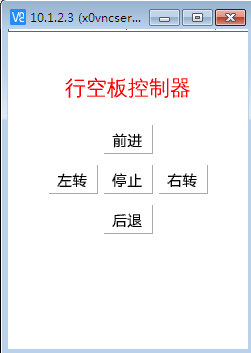
界面运行效果
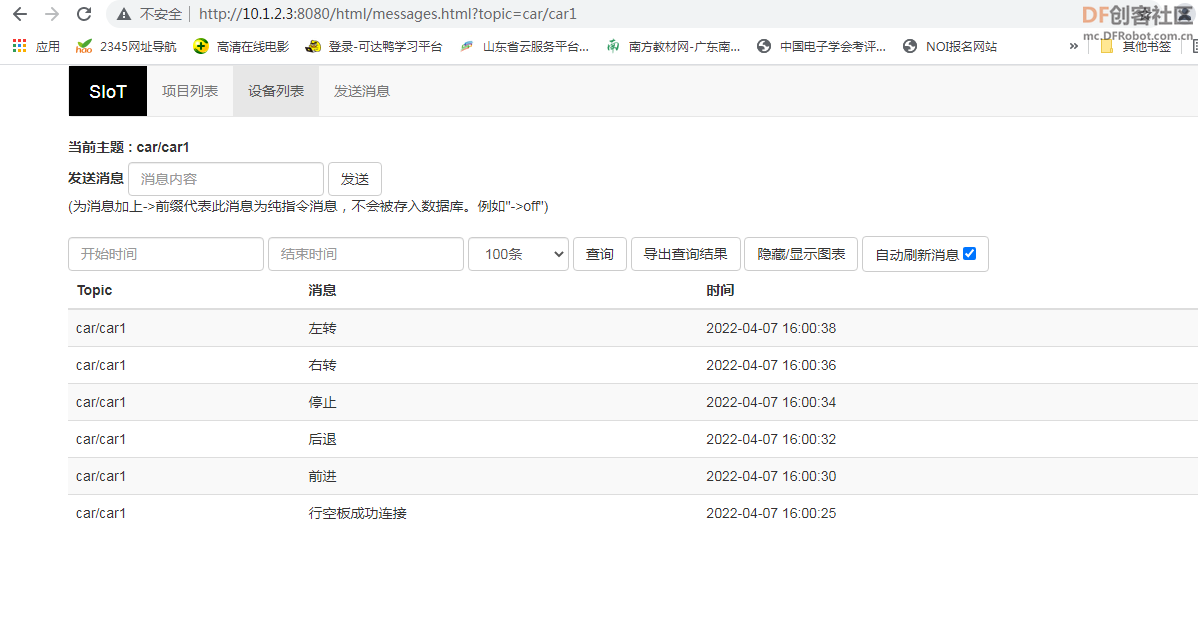
行空板服务器测试 10.1.2.3:8080
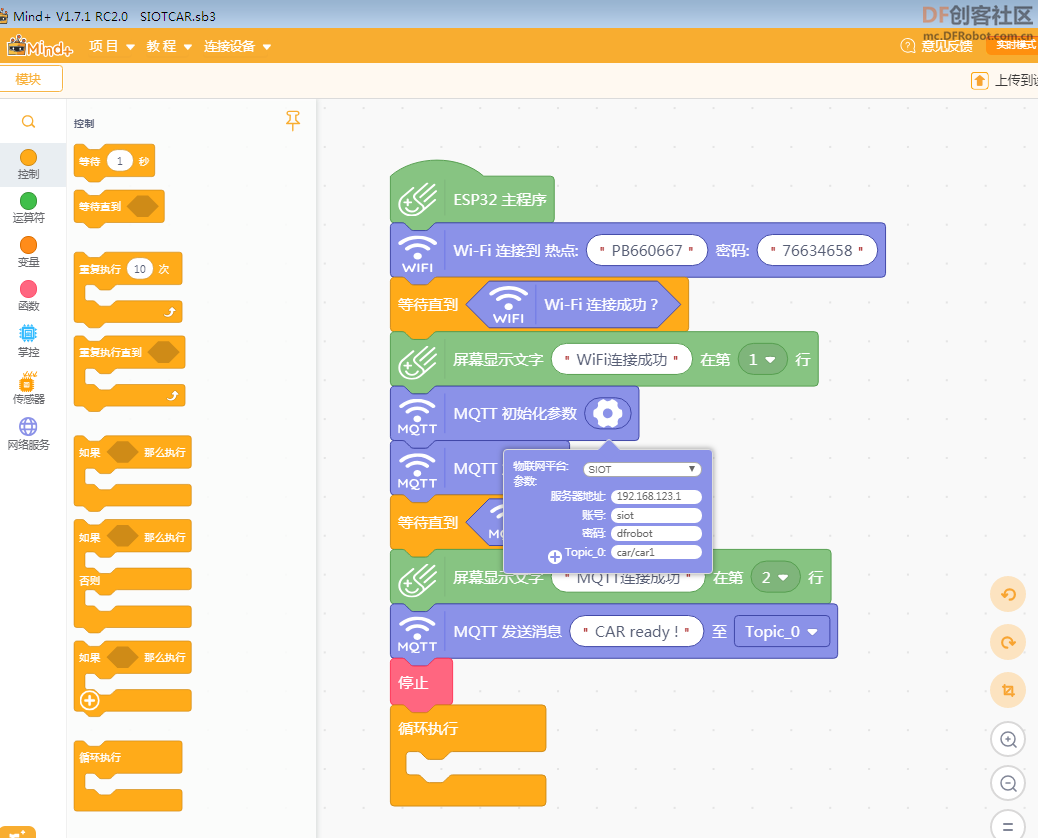
五、掌控小车端代码 mind+V1.7.1RC2.0 1.连接热点,初始化SIOTf服务器
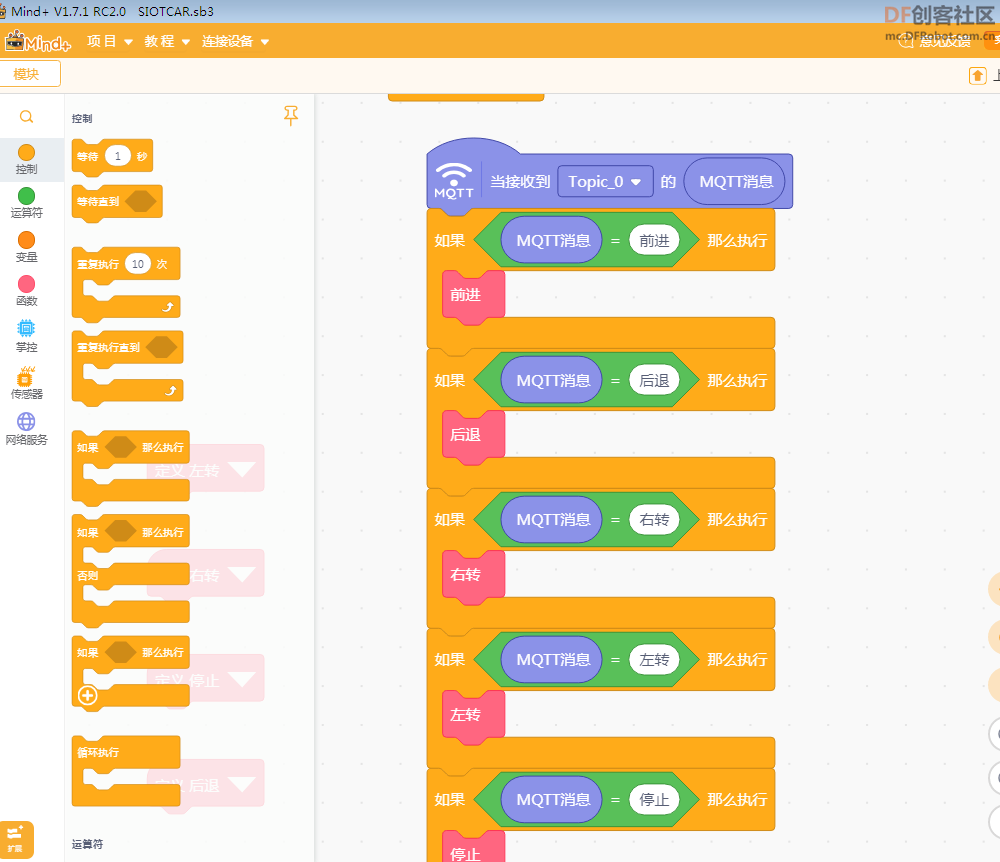
2.收到SIOT消息,小车运动状态改变
3.小车运动状态控制
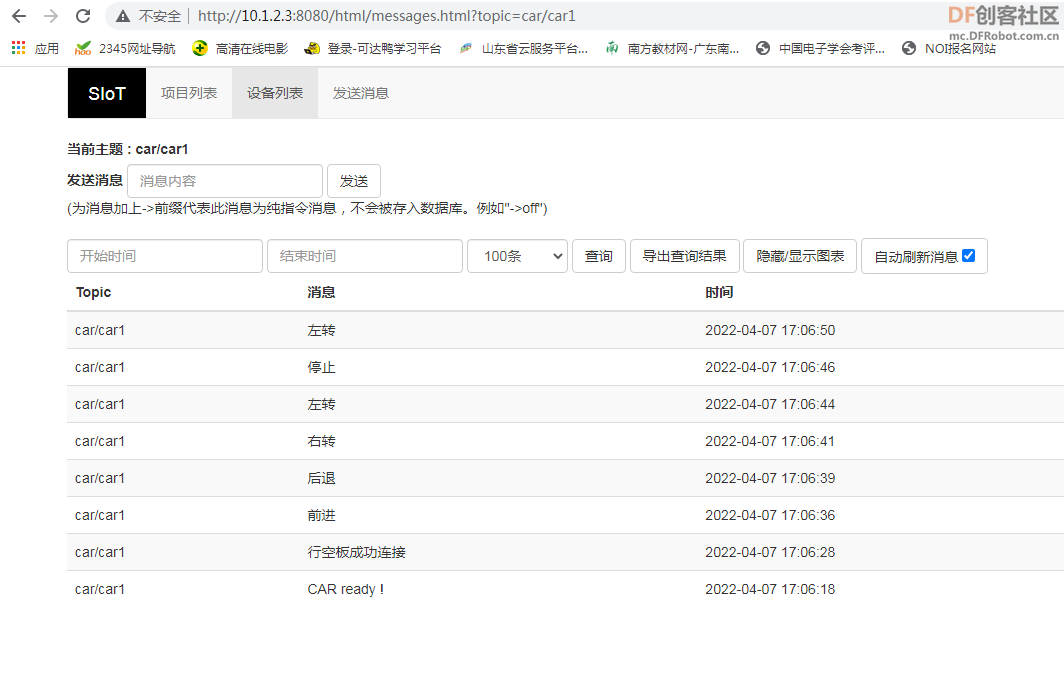
六、测试行空板和小车 依次开启小车连接热点和SIOT服务器,Thonny编辑器运行python代码,具体步骤见视频
七、代码附件
| 






 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






