|
34883| 11
|
自制一个ESP8266无人机,还可以爬墙! |

本帖最后由 RRoy 于 2022-6-15 10:28 编辑  这篇项目将和大家分享如何制作ESP8266无人机(这个无人机可以爬墙)以及它是如何工作的。 我们都知道无人机的功能是什么,就是能飞,如果告诉你这个无人机能爬到墙上或者像潜水艇一样进入水下,你会觉得有点神奇,作者表示,下面介绍的这个无人机就能做到! 文末有完整视频演示。 玩无人机需要一个飞行控制器,但我们没有太多的钱买飞行控制器,怎么办?我们可以自己做一个自己的飞行控制器。之前作者已经做了一个非常便宜的飞行控制器,使用了ESP8266,链接如下:https://www.diyprojectslab.com/esp8266-drone-controller 所需部件(让我们先来看看无人机的主要部件)
如果你是电子爱好者,你会发现下面列出的所有部件你都有 -:) 使用的工具
一架无人机需要有机架、电机、螺旋桨、电动马达、飞行控制器、电池组成。  飞行控制器 飞行控制器(又称FC)是飞机的大脑。它是一块电路板,上面有一系列的传感器,可以检测无人机的运动,以及用户的命令。如果你告诉它往前走,飞行控制器将调整后部电机的转速,使它往前走。 ESP8266模块 为了与无人机通信,我们需要蓝牙或WIFI连接,所以我们使用ESP8266 Wi-Fi模块,因为它有内置的Wi-Fi,我们可以使用它进行通信。 ESP8266开源、互动、可编程、低成本、简单、智能、最低成本的Wi-Fi硬件。 至于无人机的飞行范围。测试已经得到了范围大约是70米,使用三星手机充当WiFi热点和远程控制器。 MPU6050 MPU6050 IMU,一个低成本的设备,包含陀螺仪和加速计。 我们将使用MPU-6050和ESP8266模块来做一个无人机。 无铁芯电机 无铁芯电机是用于四旋翼飞机和无人机的微型电机,这些电机是无铁芯的,即在转子中没有金属芯,无铁芯电机可以在较小的负载下达到较高的转速。这些电机适用于微型无人机、四旋翼飞机或迷你项目。 螺旋桨 螺旋桨的目的是产生推力和扭矩以保持无人机飞行。 ESP8266无人机飞行控制器的原理图 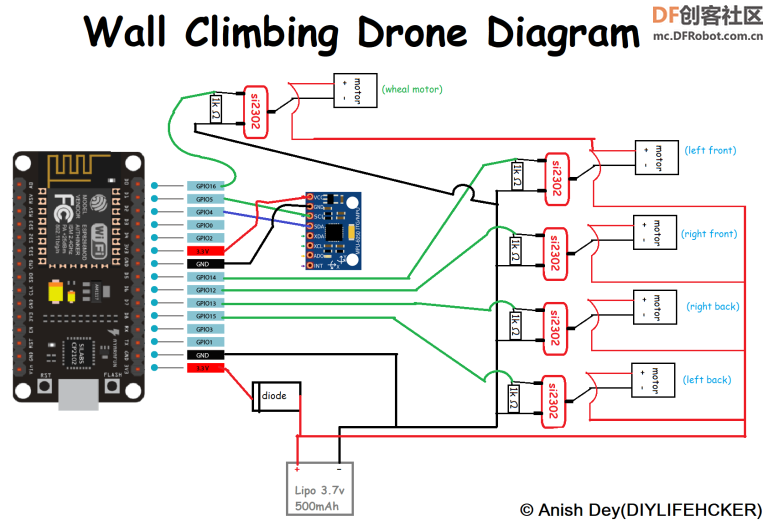 基于ESP12e(ESP8266)的接收器控制模块示意图。 电路连接 按照上图中的原理图连接电路,注意每个部件的连接细节。 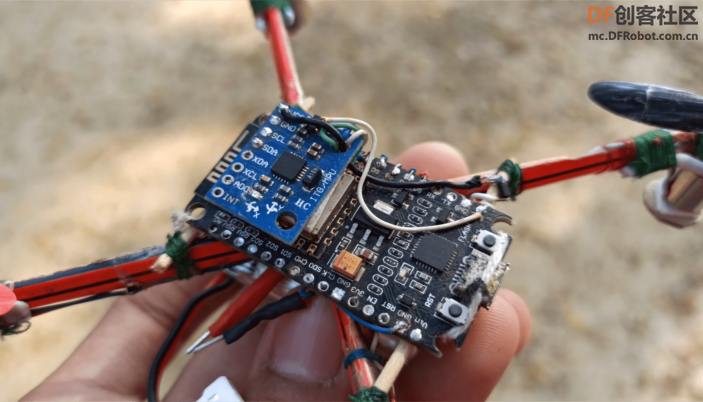 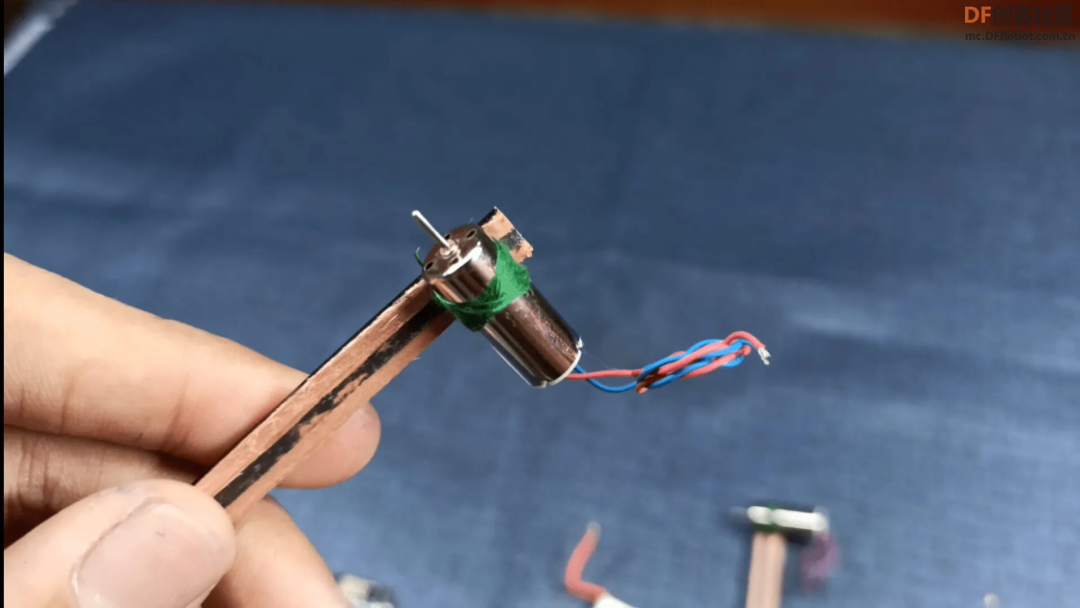 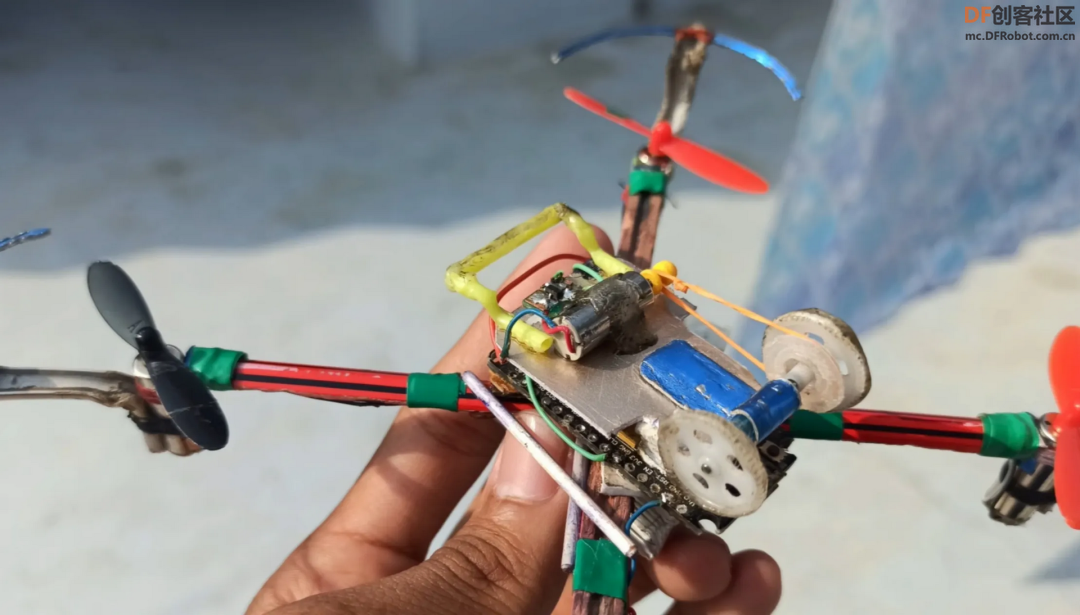 机架 机架提供了结构和刚度,它是所有部件的安装位置。 这里选择了木制的铅笔,然后给了它四轴飞行器的形状。 如果你有3D打印机,可以打印一个更好的机架。 组装无人机 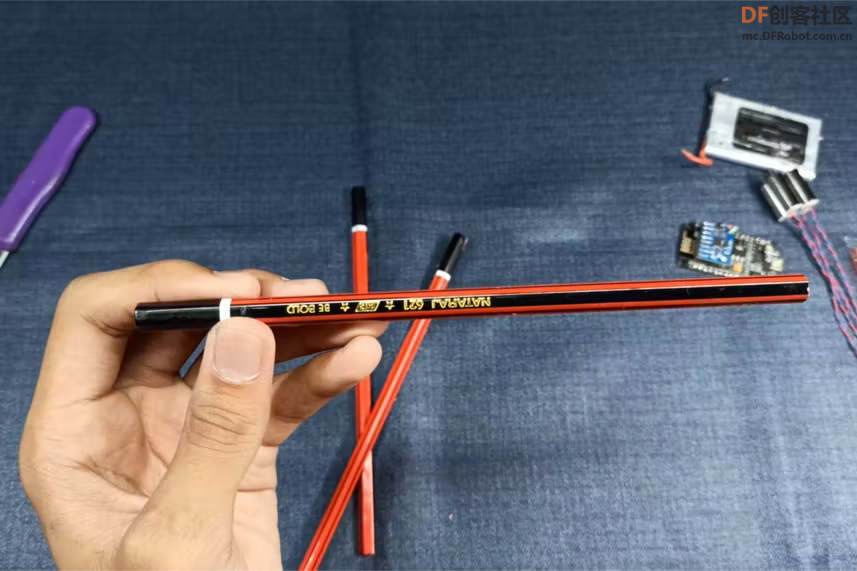 这边是用铅笔做的无人机框架,请看照片。 为了连接电机,我们需要把电机放在机架臂上。 安装所有电机  两个马达按顺时针方向旋转,两个马达按逆时针方向旋转(参考图),如果一个马达没有按正确的方向旋转,只需切换一下马达的极性。
飞行后一定要记得拔掉电池,在飞行前再装上电池。 软件部分 建议使用Arduino IDE:如果你想编辑(即WiFi网络的SSID和密码 - Android热点)
复制代码并在代码中修改自己的WIFI SSID和密码(代码可以在文末打包下载): 以上的Drone_FInal.ino文件,可以在文末打包下载。 打开Arduino IDE,从Drone_FInal.ino中复制代码并将其粘贴到Arduino IDE中。 通过编辑以下两行,在代码中编辑你的网络的SSID和密码。
安卓APP设置和 ESP8266无人机测试 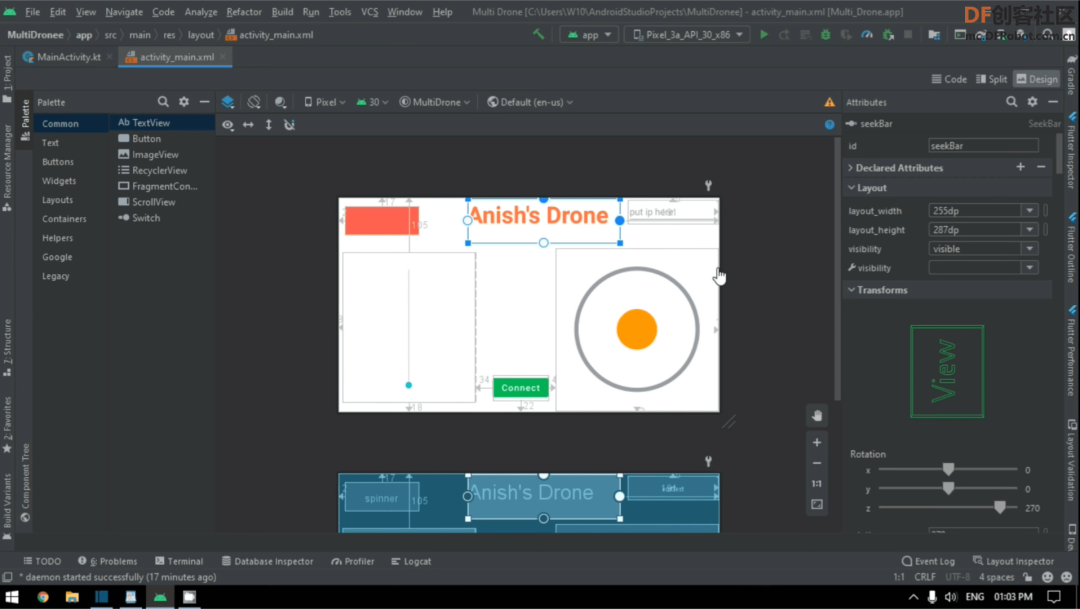  你只需要下载本步骤所附的App文件到你的安卓手机上。(可以在文末打包下载) 这个安卓应用是使用Processing for Android App开发的。    一个基于NodeMCU飞行控制器和安卓应用控制的爬墙项目。完整的细节和解释视频。 我相信,你会爱上它。 原文链接:https://www.diyprojectslab.com/m ... ne-wallclimb-drone/ 项目作者: projectslab 译文首发于:DF创客社区 开源项目,转载请务必注明项目出处与原作者信息  |

3.86 MB, 下载次数: 6613



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






