|
49192| 2
|
[大脑洞] 机械狐狸、苹果机械表|DF创客周刊(第42期) |

|
社区公众号记录每周值得分享的创客相关内容,每周五发布~ 内容开源,欢迎投稿或推荐相关内容。 投稿邮箱:MakerCommunity@outlook.com 图片&视频机械狐狸 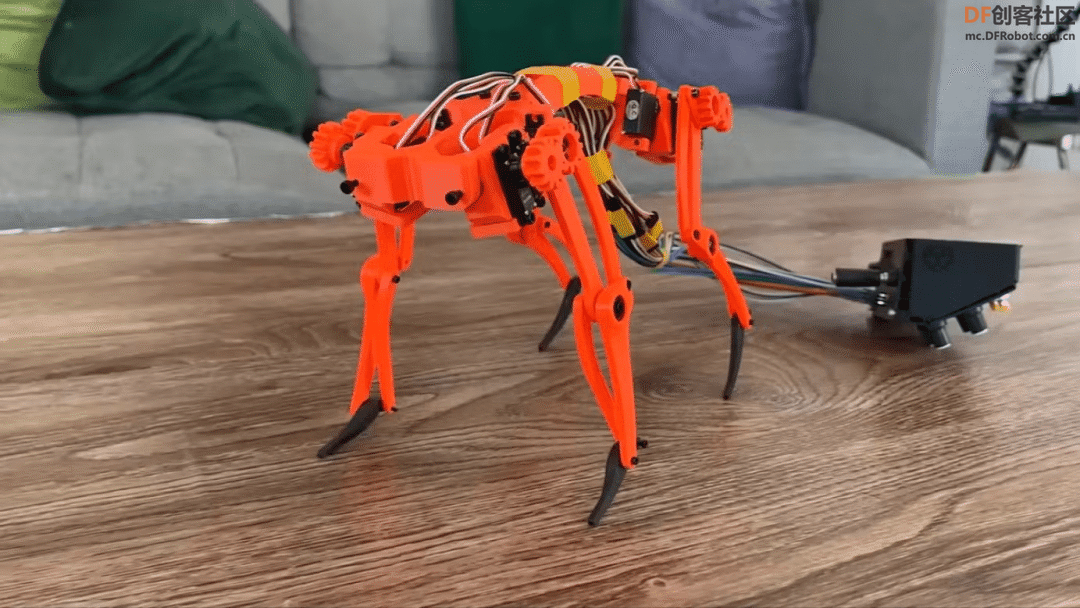 一只由Will Cogley设计并制作的机器人狐狸。这个机器人狐狸受到了波士顿动力(Boston Dynamics)、James Bruton等人的作品的启发。 设计步态的机器人基本上可以分为两种方法。第一种方法是粗暴的利用多个电机实现复杂的运动。第二种方法更加优雅,利用复杂的机械链接实现相同的效果,虽然结果会更好,但是后一种方法需要更多的设计工作,Will Cogley设计这个机器人狐狸就是用的这个方法。  虽然这个机器人受到了波士顿动力、James Bruton等人的作品的启发,但也具有独特的风格。 大多数四足的“狗”形机器人通常会在每个关节上都配备电机,便于可以通过软件进行精确控制。这种方法确实有一些重要的好处,但会增加机器人的成本、功耗和重量。Cogley的设计在电子和编程方面要简单得多,但在机械设计方面则需要更多复杂的工作。 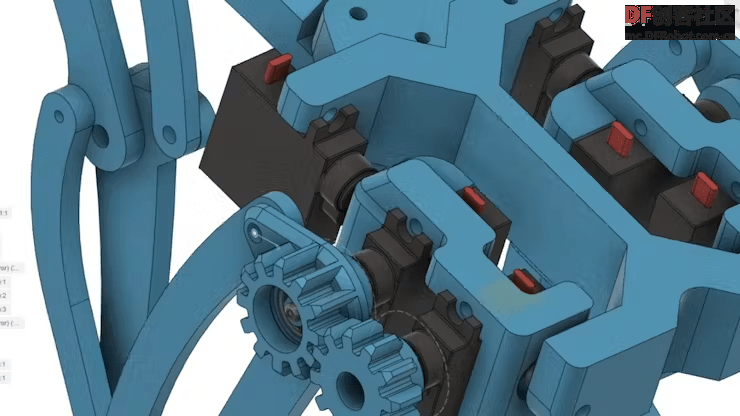 这个机器人的每条腿都是由两个并行链接组成的:第一个并行链接连接髋关节和膝关节,第二个链接连接膝关节和踝关节的顶部。这些链接是相互连接的,因此髋关节的位置会影响到膝关节和踝关节。这两个顶部的髋关节都由伺服电机通过齿轮驱动。电机位置的协调使整个腿部以及膝关节和踝关节的角度移动。此外,每条腿在髋关节之前还有另一个伺服电机,可以让腿部向内或向外旋转。 Cogley在Autodesk Fusion 360中设计了整个机器人。这个机器人的腿部机构设计并不容易。每个机械部件都是为了在Prusa Mini 3D打印机上打印而设计的,使用了尽可能少的轴承和紧固件。 目前,Cogley使用伺服电机测试器来控制机器人。不过这只是暂时的解决方案,用来帮助Cogley测试原型机器人并改进运动。之后,将转向一个能够安装在机器人本身上的专用控制器。 来源:https://www.hackster.io/news/this-robotic-fox-is-a-masterclass-in-mechanical-design-eff930e33916 苹果机械表  海外创客杰克·斯皮格尔(Jack Spiggle)通过机械转换,将废弃的苹果手表变成了一个机械表。 他把一个二手的苹果手表拆解,移除了显示屏和其他电子元件,然后使用了Seiko NH38机芯、Côtes De Genève自动上弦装置、Nautilus风格的指针以及用于组装的黄铜管、黄铜棒和青铜板材等组件。同时,他通过一个轮组解决了机芯设计和苹果手表的按钮位置不一致的问题。这个转换后的苹果手表在外观上基本与原装手表无法区分,只是不再有电子显示屏,可以透过背部看到机芯。  斯皮格尔已经在项目的Instructable页面上完整记录了制作过程。 来源:https://www.instructables.com/Mechanical-Apple-Watch-From-Real-E-Waste-Apple-Wat/ SwiftIO Playground 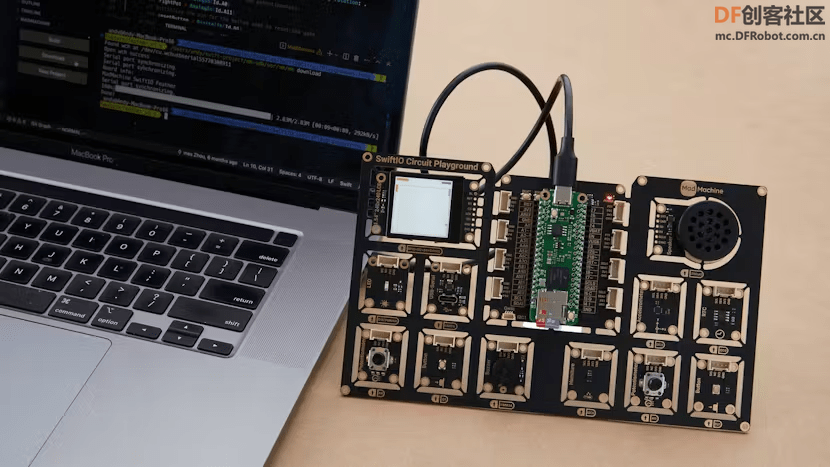 SwiftIO Playground是一款将Swift带入嵌入式微控制器领域的工具。 硬件部分是一个大型PCB板,上面连接了十二个外设模块,支持Adafruit兼容的MadBoard微控制器板。MadBoard采用NXP i.MX微控制器,运行频率为600 MHz,拥有32兆字节的RAM和8兆字节的闪存,提供足够的处理能力用于嵌入式应用。 SwiftIO Playground的模块包括TFT LCD、PWM控制LED、USB转串口转换器、两个电位器、两个按钮、蜂鸣器、音频扬声器、实时时钟、加速度计、温湿度传感器和颜色传感器。 软件方面,SwiftIO是一个将Swift适配到微控制器的框架,API是Zephyr RTOS的封装。使用VSCode扩展可以进行编程,并提供了丰富的教程和入门指南。 来源:https://www.hackster.io/news/swiftio-playground-brings-swift-to-the-microcontroller-world-46ee4dde6d61 https://www.crowdsupply.com/madmachine-limited/swiftio-playground PicoZX LCD 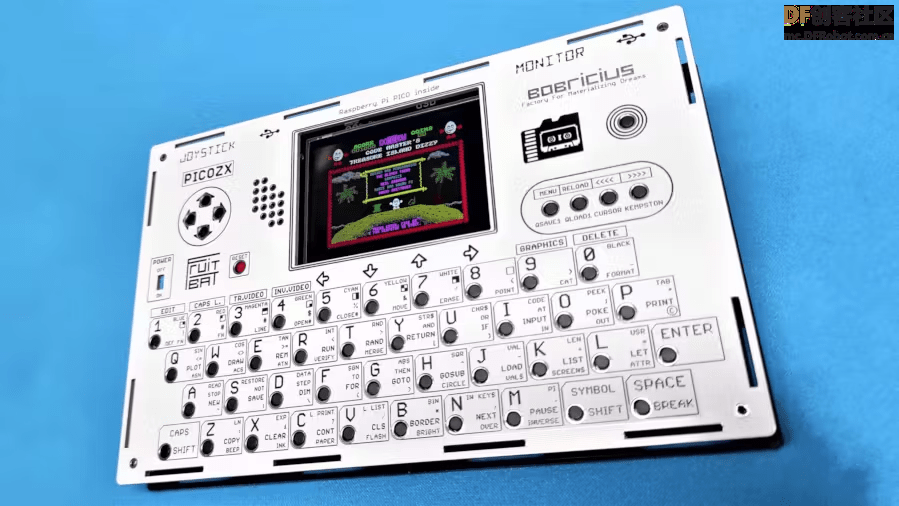 Peter "Bobricius" Misenko开发了PicoZX LCD,这是一款基于树莓派Pico的手持设备。它旨在模拟国外在1980年代流行的Sinclair ZX Spectrum八位家用电脑。  PicoZX LCD配备2.8英寸彩色屏幕和集成的18650电池,具有便携性。它包括键盘、微型SD卡插槽用于存储、USB Type-C供电接口,以及外部游戏杆和显示器的端口。该设备运行着ZX Spectrum模拟器,并且可以模拟同一时代的其他计算机。 来源:https://www.hackster.io/news/peter-bobricius-misenko-s-picozx-lcd-is-the-handheld-sinclair-zx-spectrum-the-1980s-never-got-24c00f395b9d RP2040改装的微型计算机 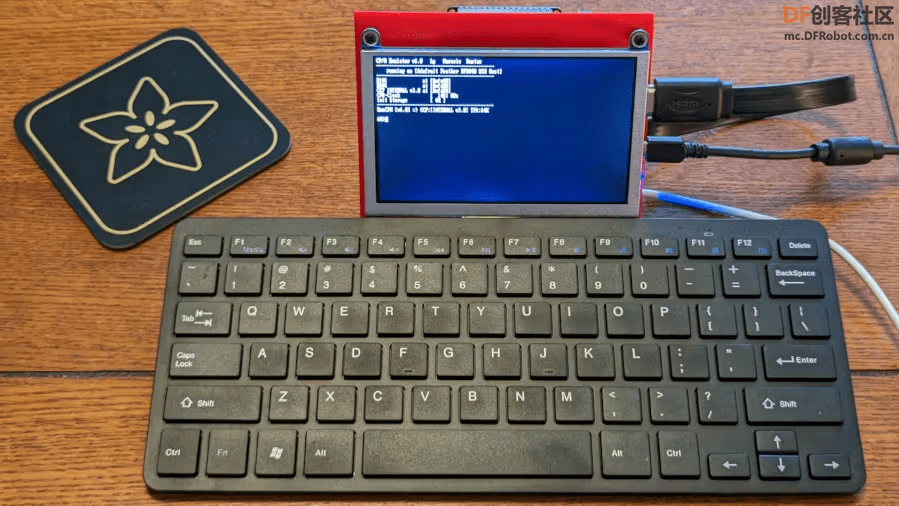 Jeff Epler将两个Adafruit Feather RP2040开发板改装成了完全功能的CP/M微型计算机。通过使用MockbaTheBorg的RunCPM模拟器的一个端口,其中一个开发板负责显示,另一个负责键盘输入,这个两处理器的微型计算机可以完全独立工作。 之所以使用两个Adafruit Feather RP2040板子,是因为RP2040的强大PIO(可编程输入/输出)外设分别用于数字视频输出和USB主机功能。但是为了实现这两个任务,每个任务几乎都需要芯片的全部容量,所以必须将项目分为两个部分。其中一个Adafruit Feather负责CPU和操作系统仿真以及视频信号生成,另一个负责读取按键并通过UART连接将按键信息传输到第一个板子上。 CP/M是Gary Kildall在1970年代创造的,最初被称为控制程序/监视器。它是一种对小型和微型计算机非常有影响力的操作系统,以至于其与微软后来的MS-DOS的相似性成为两家公司之间的争议点。CP/M最近由当前所有权者DRDOS的总裁Bryan Sparks重新发布,采用了清晰的开源许可证。在过去,CP/M需要一台相当强大的计算机才能运行,但现在可以在一颗4美元的微控制器上通过仿真来运行。 Epler的CP/M主机项目使用了两种不同的Feather RP2040开发板变种,一种带有USB Type-A接口作为外部键盘的USB主机设备,另一种带有HDMI风格接口传输DVI视频信号,可以直接连接到任何HDMI显示器。通过添加一个Adalogger FeatherWing扩展板,该项目还具备了micro SD卡存储和实时时钟功能,配备一块5英寸HDMI显示器。 在组装完项目之后,你可能会想在上面做一些事情。因为互联网上有很多CP/M的软件,所以可以轻松找到。你可以下载一些经典或是现代的CP/M软件。如果有汇编器或BASIC解释器,甚至可以在设备上编写自己的全新CP/M软件。 来源:https://www.hackster.io/news/jeff-epler-turns-two-adafruit-feather-rp2040-boards-into-a-fully-functional-cp-m-microcomputer-ee2a95b123dc 周刊首发于DF创客社区 版权协议:WTFPL |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






