|
24985| 0
|
[项目] 如何使用树莓派 Pico 制作一个目标追踪机器人车 |

|
本帖最后由 神经翻译局 于 2025-3-14 11:07 编辑 大家好,今天,给大家分享一个使用树莓派Pico做的的目标追踪机器人车。 项目概述: 本项目是使用树莓派 Pico 和 L298N 电机驱动器构建的目标追踪机器人车,结合了机械轮,可以敏捷和多方向的移动。设计中集成了超声波传感器,可以进行精确的距离测量和 IR 传感器进行准确的路径检测,看看是不是作为科技爱好者的你,理想中的 DIY 机器人项目。 文章附带的电路图和详细的机器人照片,提供了清晰的接线和组装指导,确保即使是初学者也能跟上,制作出属于自己的自主机器人车辆。 这个项目利用强大的微控制器平台和高效的传感器集成,不仅展示了机器人丝滑的运动技能和响应灵敏的转向功能,还可以实时检测障碍物。通过代码编程控制电机和传感器相互结合,来实现机器人可以有效追逐和导航的目标;再加上各种配件加持和详细指导,这个树莓派 Pico 机器人车项目,对于那些对机器人,自动化,和创新科技创造感兴趣的人来说,都是值得一试的。 现在,让我们开始我们的项目吧! 所需的电子组件:     我使用 Tinkercad 来规划和设计我的项目。我设计这个底盘时考虑了三个因素:简单的装配,3D 打印,和负担得起的价格。在确定设计方案后,我将文件导出为 STL 格式,确保它准备好进行 3D 打印。附带的文件包括所有必要的组件和尺寸,以确保精确打印和直接装配。为了更大的经济性,你也可以考虑从亚克力板上 CNC 切割底盘框架。    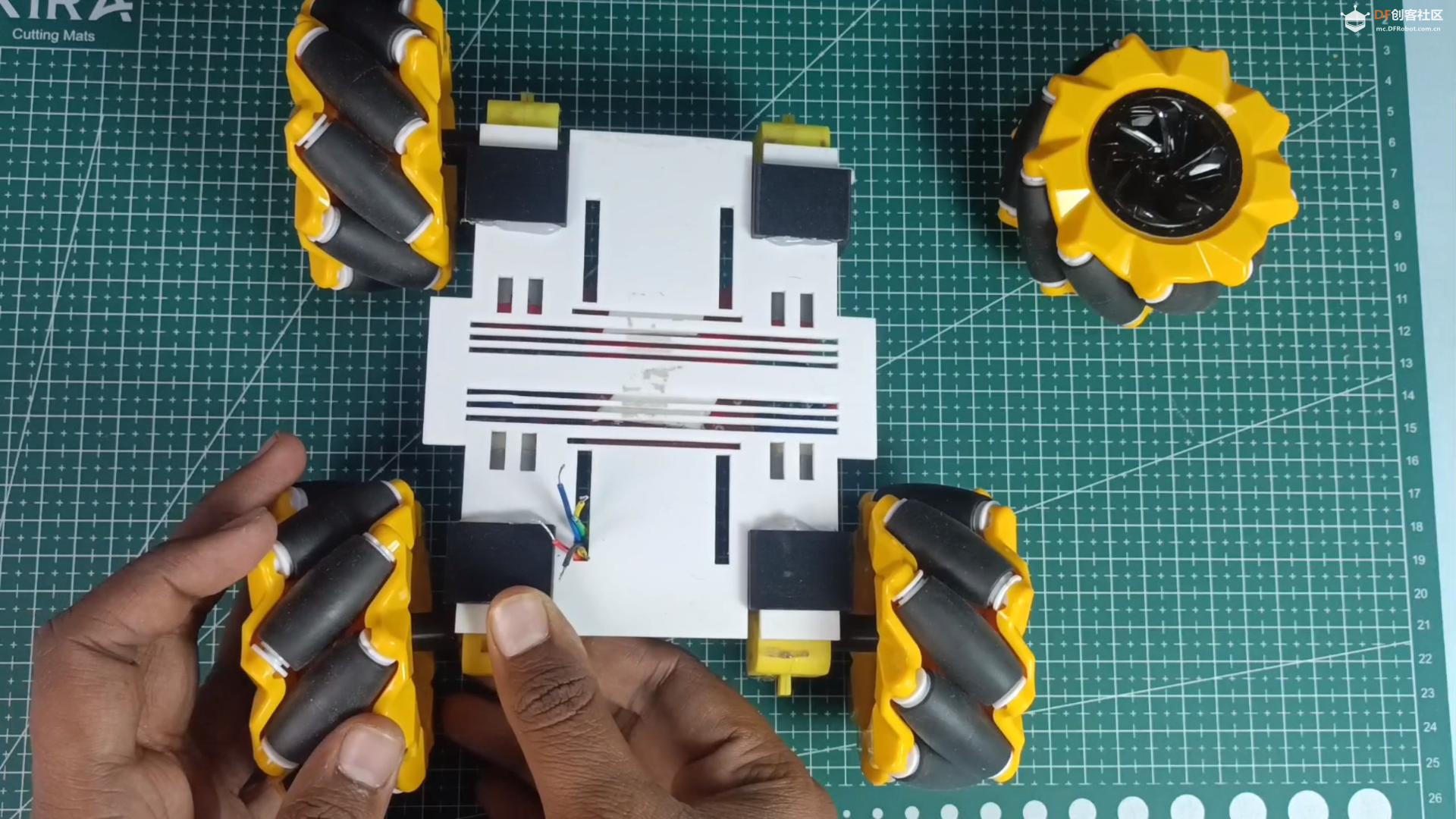        底盘组装步骤: 1)将电线焊接到齿轮电机上。 2)将3D打印的电机安装夹子固定到齿轮电机上。 3)使用热熔胶将电机(带安装夹子)固定到机器人主体上。 4)将L298N电机驱动器安装到底盘上,并将电机线接到其端子上。 5)将Mecanum轮安装到齿轮电机上。 你的底盘组装现在已经完成,准备进行下一步。    JLCMC是您一站式电子制造需求的解决方案,提供了近60万个SKU的广泛目录,覆盖硬件、机械、电子和自动化组件。他们承诺提供真正的产品,快速发货(大多数现货产品在24小时内发货),并提供有竞争力的价格,这使他们真正与众不同。此外,他们出色的客户服务确保您总能得到您需要的产品,使您的项目变为现实。 为了支持我们的社区,JLCMC提供了独家19美元的折扣券。这是节省高质量组件的完美机会,不要错过—访问 https://jlcmc.com/?from=RBL 来探索他们惊人的产品范围,并立即获取您的折扣券!     L298N有六个关键引脚,您需要连接到Raspberry Pi Pico:ENA, IN1, IN2, IN3, IN4, 和 ENB。这些引脚让你的Pico告诉L298N该做什么。下面是如何接线: 1) ENA (使能电机A): • 将ENA接到Pico的GP7。 • 此引脚使用PWM控制电机A(左侧电机)的速度。把它想象成你汽车左侧的油门踏板。 2)IN1 和 IN2 (电机A方向控制): • 将IN1接到Pico的GP6,IN2接到Pico的GP5。 • 这些引脚控制电机A的方向。通过设置一个为HIGH,另一个为LOW,你可以让电机向前或向后旋转。例如:IN1 = LOW, IN2 = HIGH:电机A向前旋转,IN1 = HIGH, IN2 = LOW:电机A向后旋转。 3)IN3 和 IN4 (电机B方向控制): • 将IN3接到Pico的GP4,IN4接到Pico的GP3。 • 这些引脚控制电机B(右侧电机)的方向。它们的工作方式与IN1和IN2相同:IN3 = HIGH, IN4 = LOW:电机B向前旋转,IN3 = LOW, IN4 = HIGH:电机B向后旋转。 4) ENB (使能电机B): • 将ENB接到Pico的GP2。 • 该引脚使用PWM控制电机B的速度,就像ENA控制电机A的速度一样。它就是你汽车右侧的油门踏板。     电机驱动器连接完成后,现在是时候接上让你的机器人汽车具有“感知”功能的传感器了。在这个步骤中,我们将连接超声波传感器和红外传感器。这些传感器将帮助你的机器人汽车在环境中导航并做出明智的决策。让我们开始吧! 连接超声波传感器 超声波传感器有四个引脚:VCC、GND、Trigger、和Echo。这是如何将它们连接到 Raspberry Pi Pico 的方法: 1)VCC: 连接到 Pico 上的 3.3V 引脚。这为传感器提供电源。 2)GND: 连接到 Pico 上的 GND 引脚。这完成了电路。 3)Trigger: 连接到 Pico 的 GP0 引脚。此引脚发送超声脉冲。 4)Echo: 连接到 Pico 的 GP1 引脚。此引脚接收反射脉冲并告诉 Pico 物体距离有多远。 连接红外传感器 每个红外传感器有三个引脚:VCC、GND、和OUT。我们将连接两个红外传感器——一个用于机器人汽车的右侧,另一个用于左侧。 右侧红外传感器: 1)VCC: 连接到 Pico 上的 3.3V 引脚。 2)GND: 连接到 Pico 上的 GND 引脚。 3)OUT: 连接到 Pico 的 GP8 引脚。根据传感器是否检测到障碍物或线路,此引脚发送 HIGH 或 LOW 信号。 左侧红外传感器: 1)VCC: 连接到 Pico 上的 3.3V 引脚。 2)GND: 连接到 Pico 上的 GND 引脚。 3)OUT: 连接到 Pico 的 GP9 引脚。此引脚的工作方式与右传感器相同。   L298N 电机驱动器有两个电源输入引脚:VCC和GND。这是如何连接电池的方法: 1)电池正极 (+):连接到 L298N 上的 VCC 引脚。这为电机提供电源。 2)电池负极 (-):连接到 L298N 上的 GND 引脚。这完成了电路。 重要提示:请确保电池电压与电机的额定电压相匹配。例如,如果你的电机额定为 6V,不要使用 12V 的电池,因为这可能会损坏它们。 L298N 有一个5V 输出引脚可以为 Raspberry Pi Pico 提供电源。这是如何连接它的方法: 1)L298N 5V 引脚:连接到 Raspberry Pi Pico 的 VBUS 引脚。这为 Pico 提供了稳定的 5V 电源。 2)L298N GND 引脚:连接到 Raspberry Pi Pico 的 GND 引脚。这确保了 L298N 和 Pico 之间有一个公共的地线。 为什么这样做可以工作:L298N 有一个板载电压调节器,可以将电池电压降低到 5V,这对 Pico 是安全的。      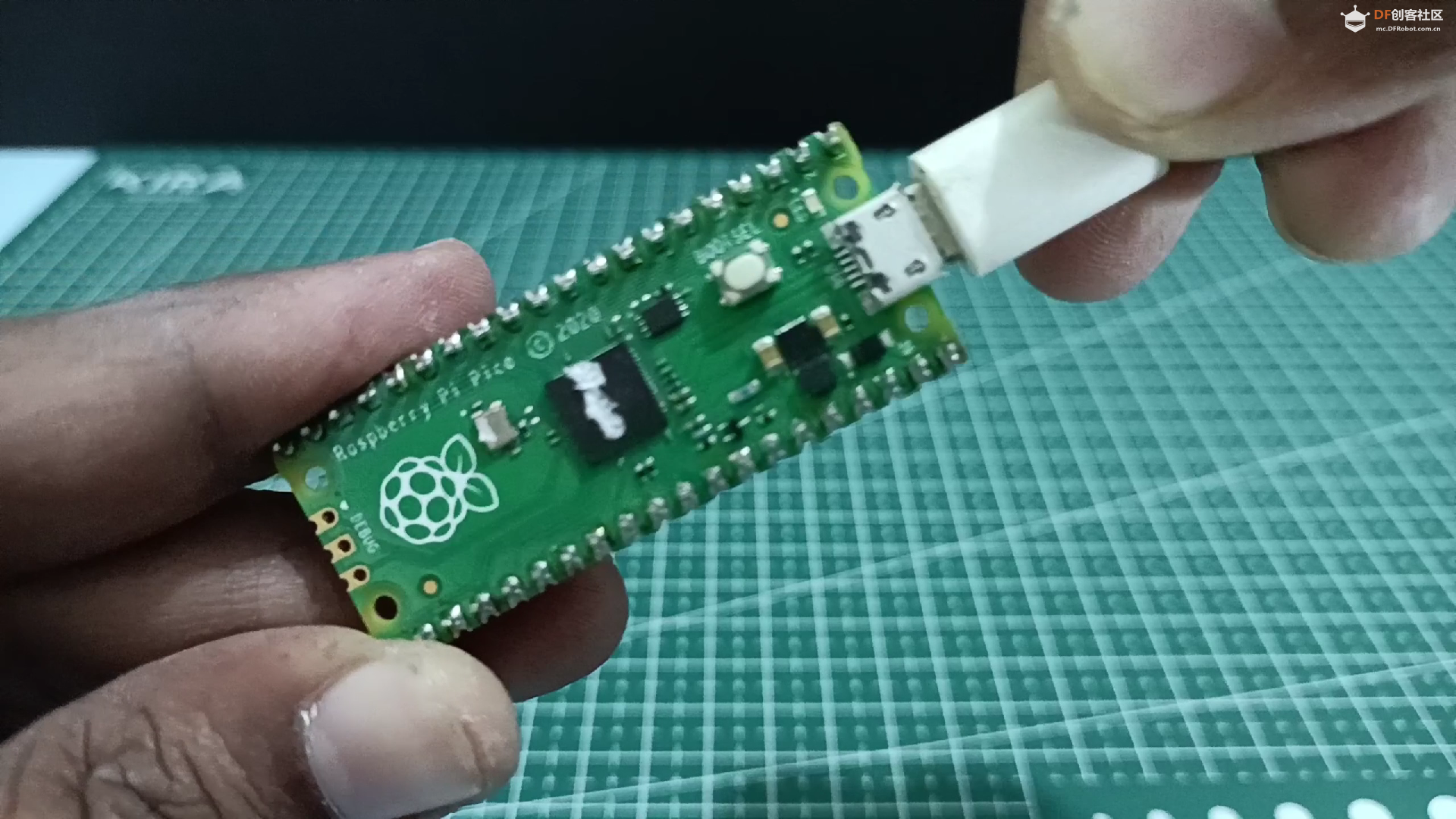 现在你的机器人汽车已经完全接线了,是时候用代码让它活过来了!在这个步骤中,我们将使用Thonny IDE,一个用户友好 Python编辑器,将代码上传到您的树莓派Pico。这段代码将控制电机,读取传感器数据,并使您的机器人汽车追逐目标。让我们开始吧! 1)安装Thonny IDE: 如果您还没有安装Thonny IDE,请按照以下步骤进行: • 访问 thonny.org. https://community.dfrobot.com/thonny.org • 下载与您的操作系统(Windows,macOS或Linux)匹配的Thonny版本。 • 按照屏幕上的说明安装Thonny。 2)将树莓派Pico连接到您的电脑: • 将Micro-USB电缆插入您的树莓派Pico。 • 将电缆的另一端连接到您的电脑。 • 在插入Pico时按住BOOTSEL按钮。这会使Pico进入引导加载程序模式,从而被您的电脑识别。 3)为树莓派Pico设置Thonny IDE: • 在您的电脑上打开Thonny IDE。 • 转到工具 > 选项。 • 在解释器选项卡中,选择MicroPython(树莓派Pico)作为解释器。 • 选择正确的端口(通常在Linux上像/dev/ttyACM0或Windows上的COMX)。 • 点击确定以保存设置。 4)将代码上传到树莓派Pico: • 复制此代码: • 点击Thonny IDE中的保存按钮。 • 当提示时,选择树莓派Pico作为保存文件的位置。 • 将文件保存为main.py。这确保当Pico通电时代码会自动运行。 • 点击运行按钮(绿色箭头)以上传并执行代码。 恭喜!您已成功使用树莓派Pico,L298N电机驱动器,超声波传感器和红外传感器构建了您的目标追踪机器人车。此项目的演示视频可以在这里查看:https://youtu.be/3PxGN1RHmIA 感谢您对此项目的关注。如果您对未来的项目有任何问题或建议,请留言,我将尽力为您提供帮助。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






