|
8057| 2
|
[项目] 使用ESP32 C6 Mini 制作DIY摄影滑轨 |

本帖最后由 神经翻译局 于 2025-3-27 15:03 编辑   拍摄流畅、电影般的镜头可以为视频和摄影带来额外的专业感。然而,高质量的摄影滑轨通常昂贵、笨重,对于DIY创作者或刚刚起步的人来说,难以接受。 这个项目的来源:一个由回收的3D打印机零件制作的单向线性摄影滑轨,设计上注重成本效益、功能性和可定制性。 在这个指南中,你讲学会如何从旧3D打印机中回收的零件制作DIY摄影滑轨。项目包含从在Fusion 360中设计和建模到使用最少的额外组件(如ESP32微控制器、一个小型OLED显示器和几个按钮)组装滑轨的所有内容。你可以轻松实现控制速度、微步和寻零,设计出专业级的功能而不需要专业的价格。 这个项目非常适合希望升级旧设备、探索DIY电子产品或在预算内提升摄影设备的人。让我们开始吧! 所需材料  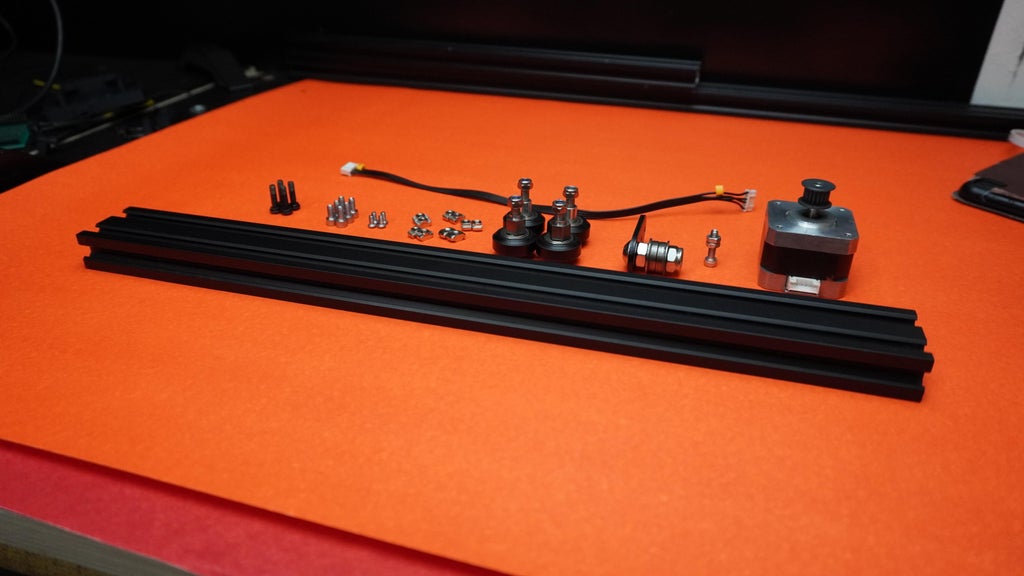 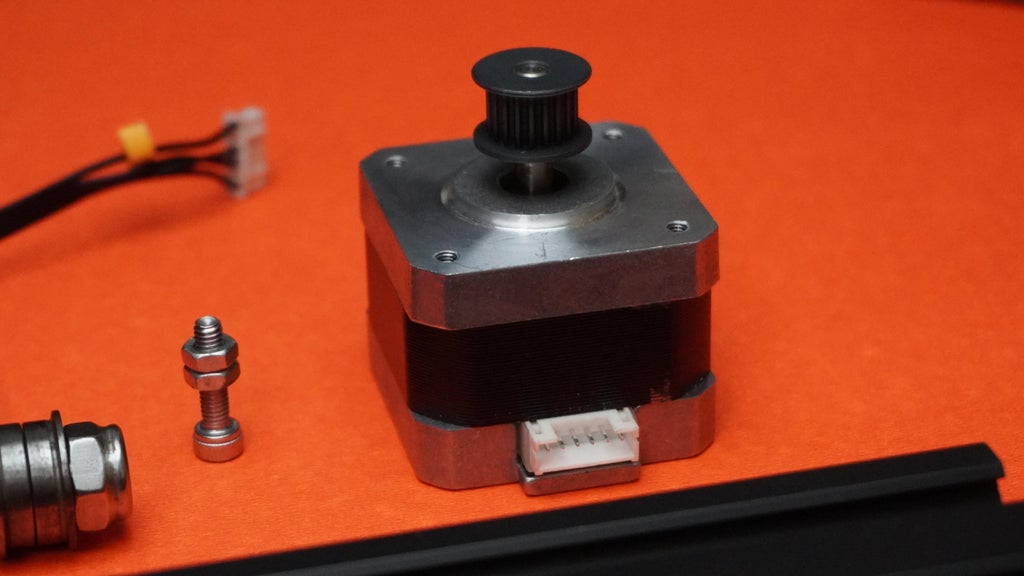  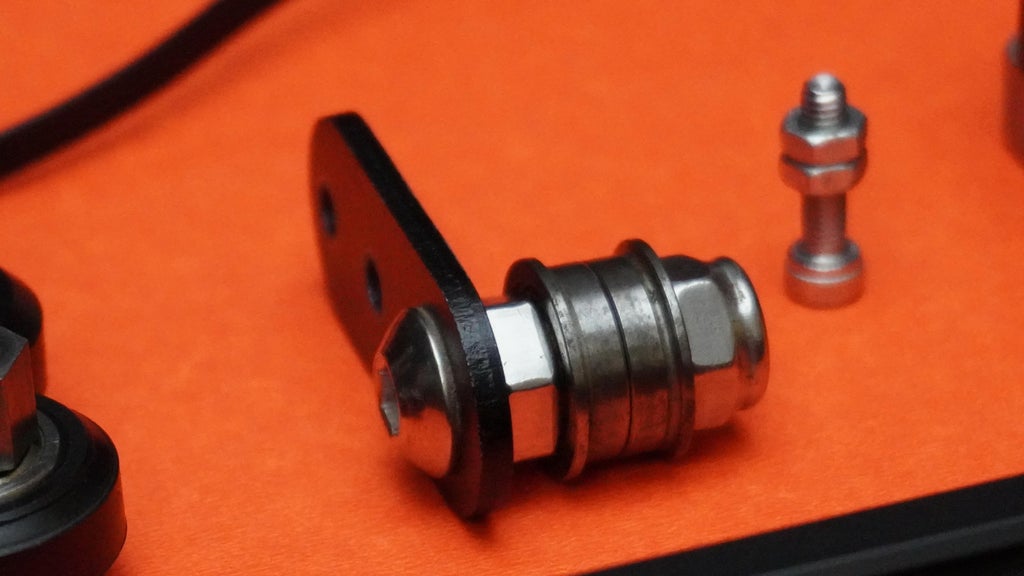      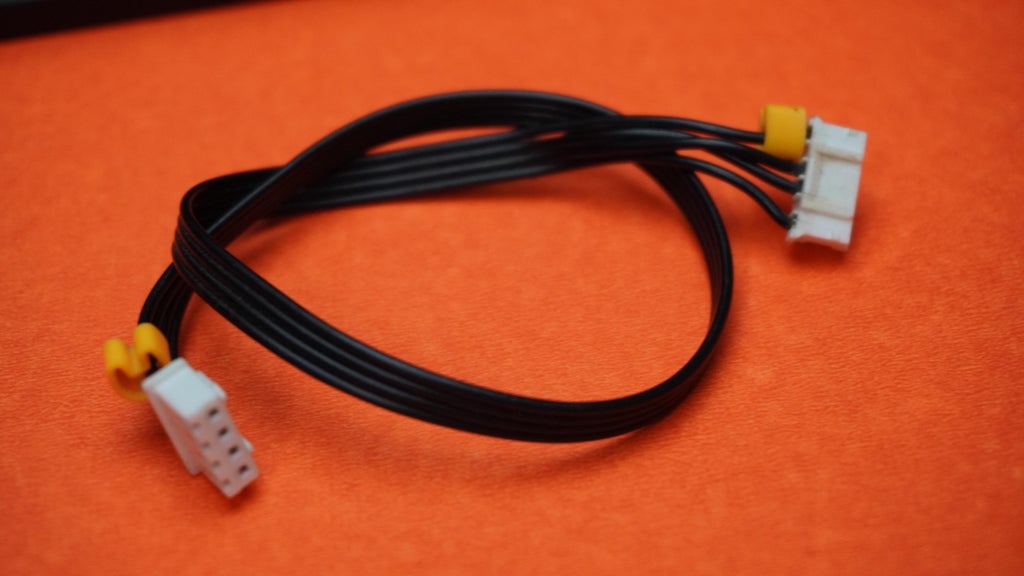 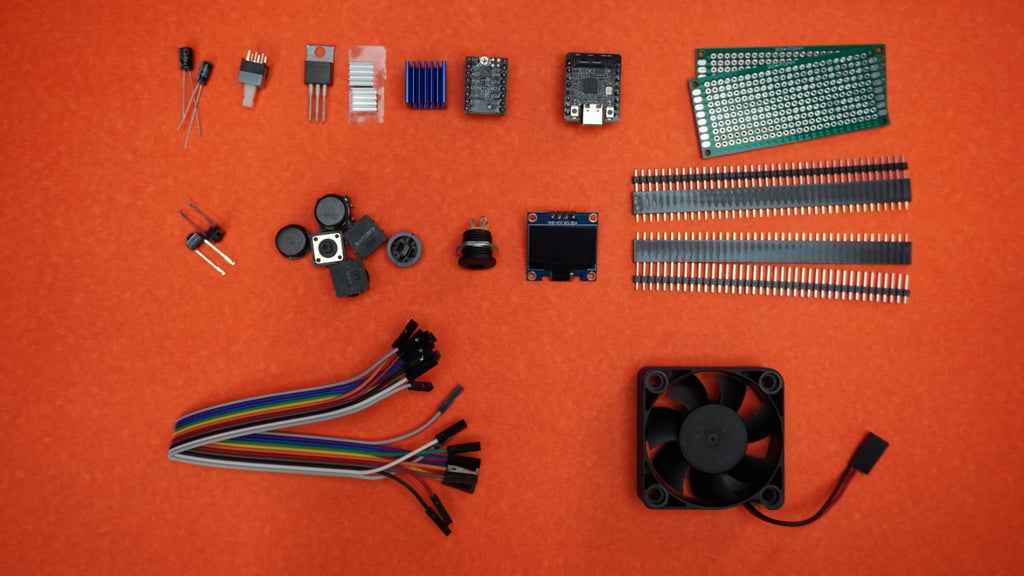 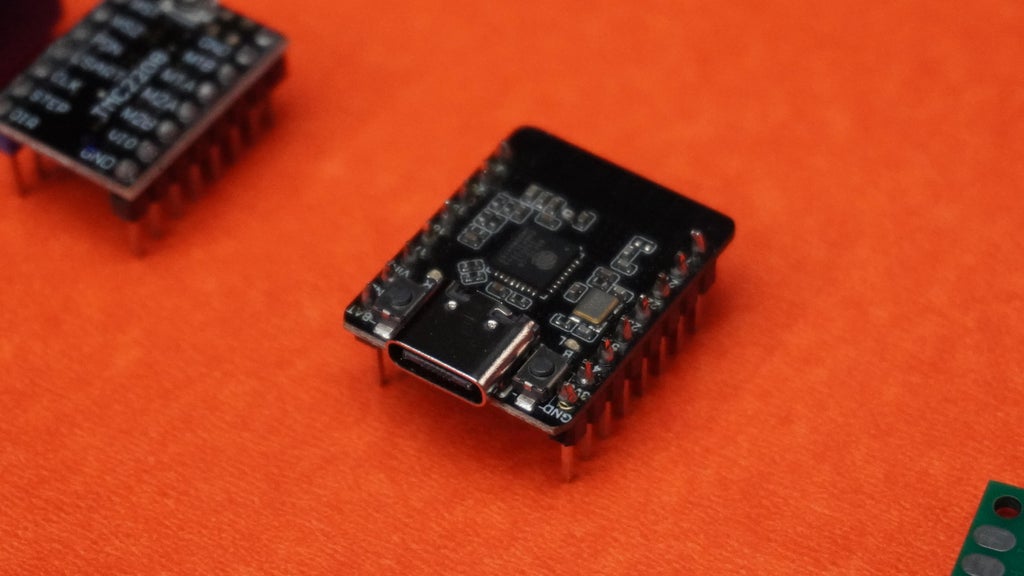 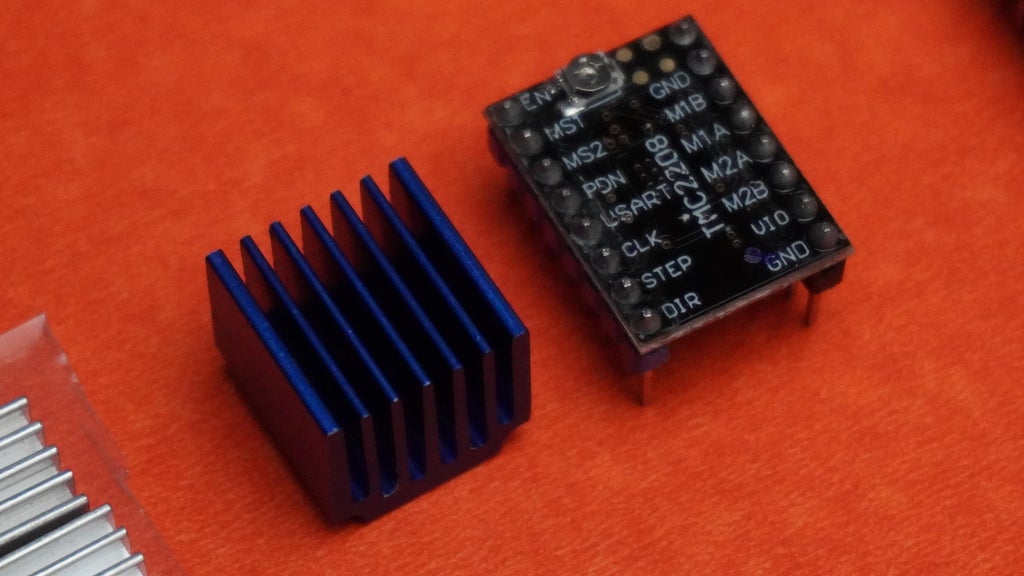 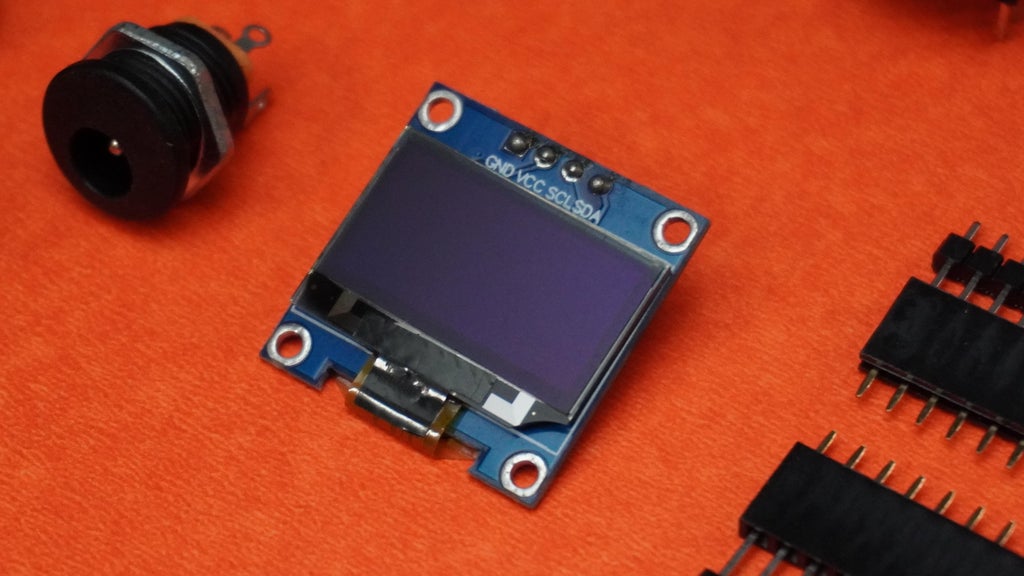 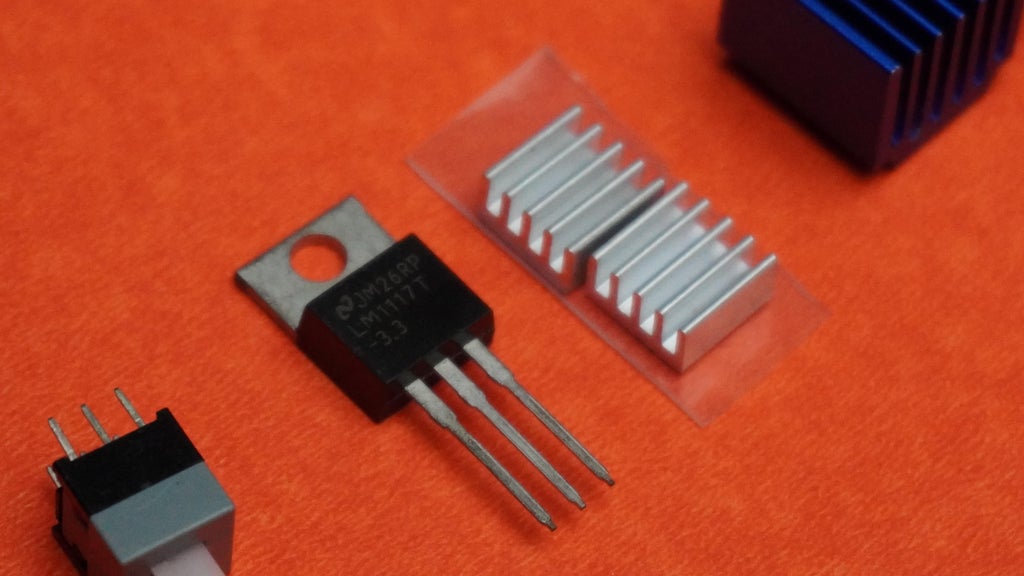  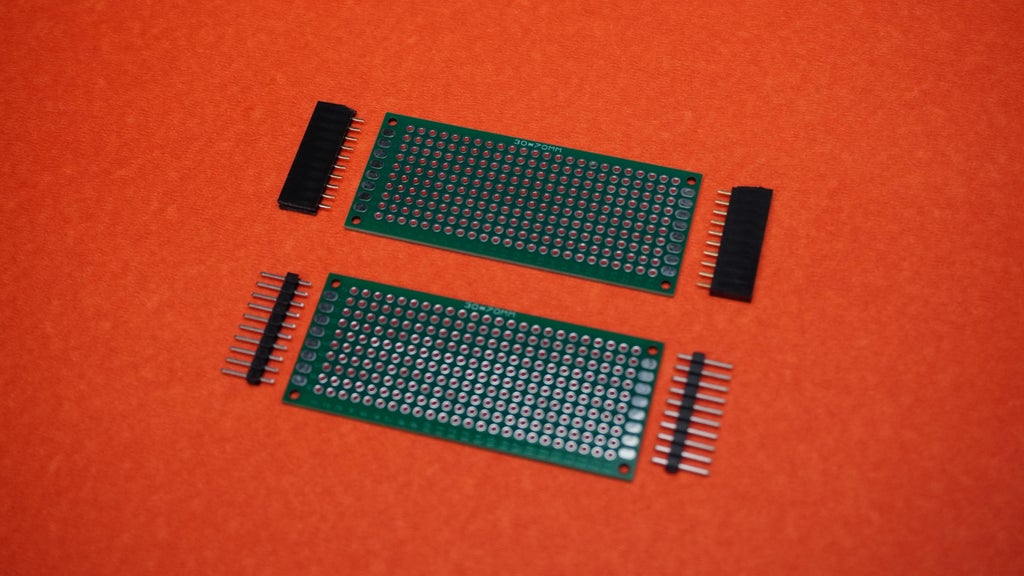  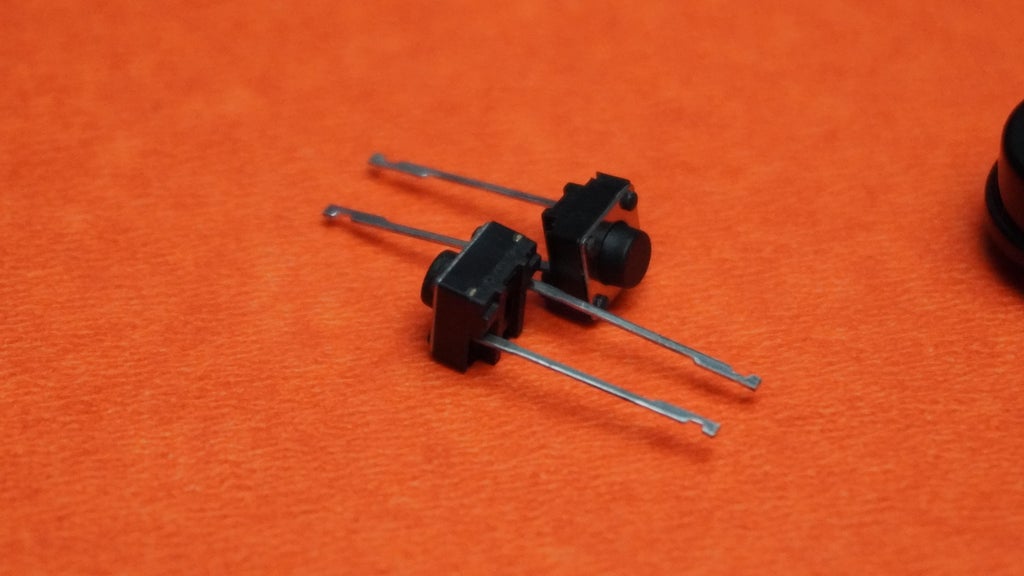  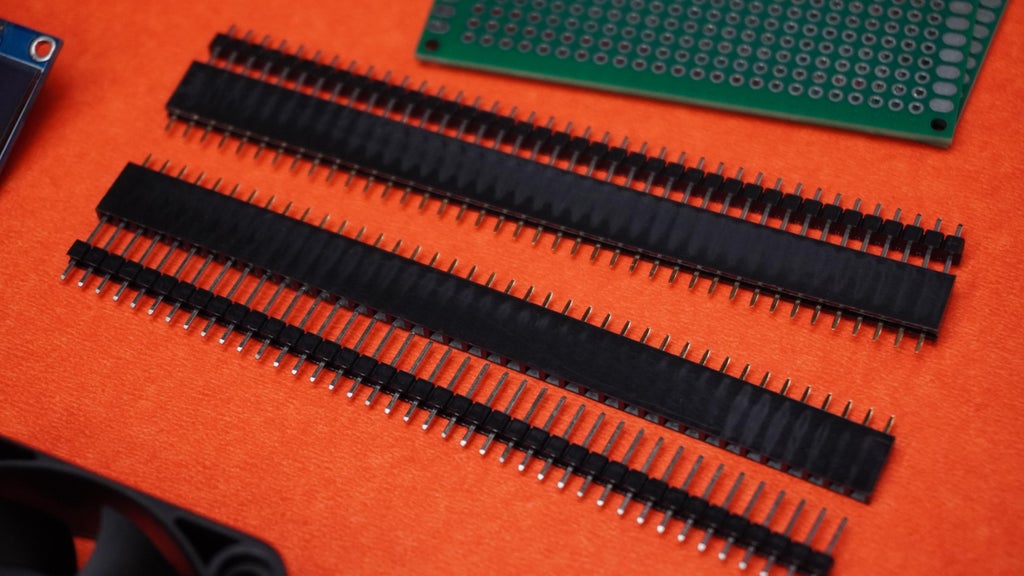   所需材料: 1x ESP32 C6 Mini 1x TMC2208 1x LM1117T 2x 30X70 mm Prototyping Board 1x 0.96" OLED Display 1x 5050 5V Fan 4x Tactile Push Buttons 2x 5mm Push Buttons 1x DC Female Connector 1x Male Connector 1x Female Connector 1x Belt 1x Jumper Wires 1x 12V 2A Power Supply 1x DC Push Switch 从旧3D打印机获取的部件检查列表: 1x 4020 400mm铝型材 1x 步进电机 4x 滚轮 1x 皮带张力滚轮 10x M4 T型螺母 7x M4 15mm螺钉 6x M4 8mm螺钉 4x 用于步进电机的M2螺钉 1x 步进连接器 4x M2螺钉 2x M3螺钉    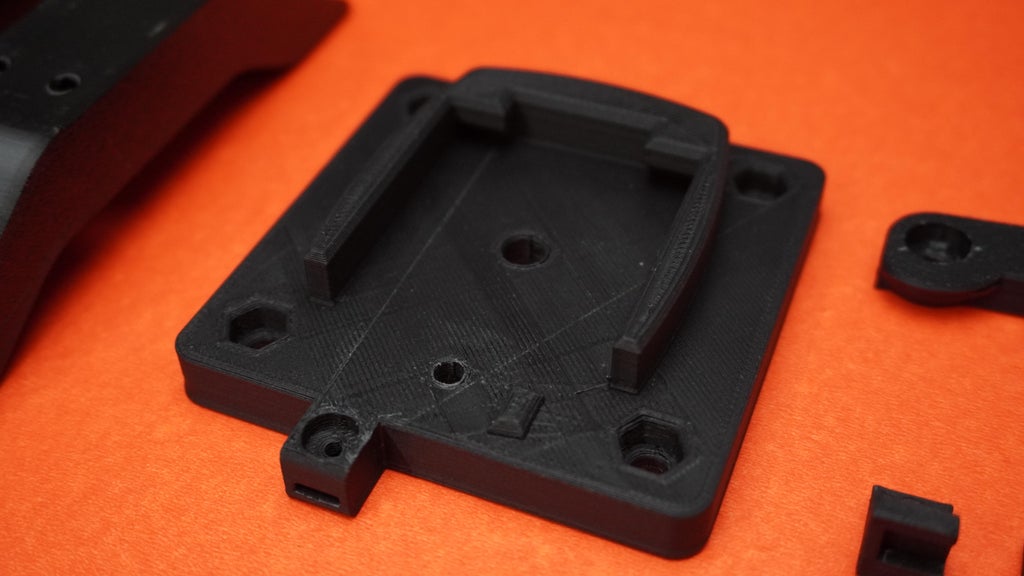  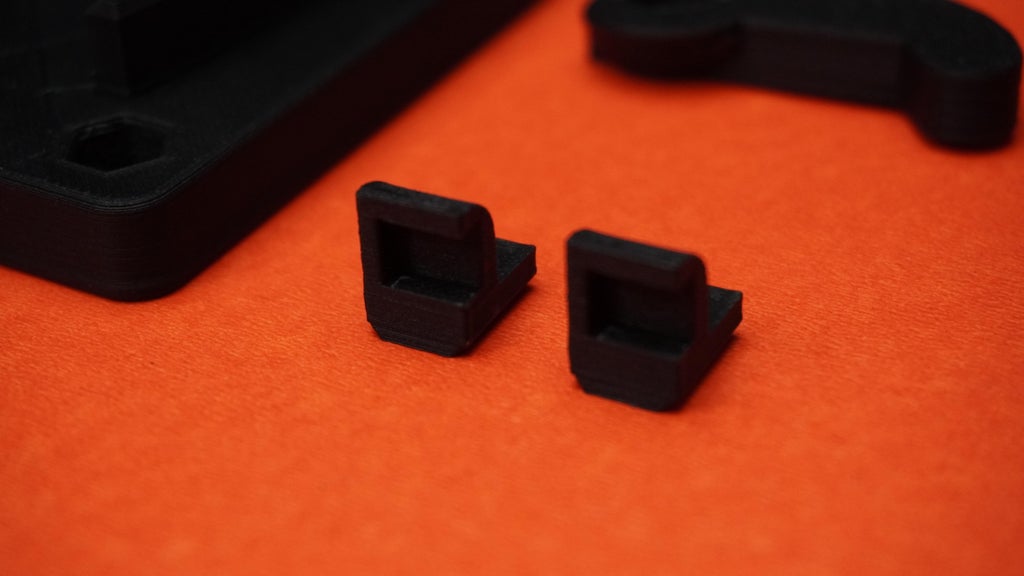 制作这个相机滑轨的第一步是在Fusion 360中创建详细的3D模型,以确保每个组件能够完美地配合。由于我复用了Ender 3 3D打印机的部件,所以我直接从它的设计中导入标准组件,节省了时间,包括铝合金型材、步进电机、滚轮、螺丝和螺母。另外,我还加入了一个预制的128x64 OLED显示器模型,以便在滑轨中视觉化其位置和适配情况。 为了完成滑轨,我在Fusion 360中设计了一些定制组件: 按键:为了直观地控制滑轨的速度和方向而建模。 外壳:为电子设备和电机设计了一个紧凑且保护性的外壳。 风扇装置:为5050 5V风扇设计的插槽,帮助在运行过程中保持组件冷却。 滑轨脚:稳定的支撑,保持滑轨水平和安全。 限位开关装置:放在两端,允许自动改变方向,增强滑轨的功能性。 设计完成后,我打印了定制的部件,确保它们足够耐用,可以反复使用。有了完整的3D模型,我开始进行下一步:组装! 需要打印的部件: 1x电机安装座 1x覆盖板 2x腿 2x限位开关安装座 1x快速释放板 1x快速释放旋钮 1x侧面通风口 1x风扇通风口      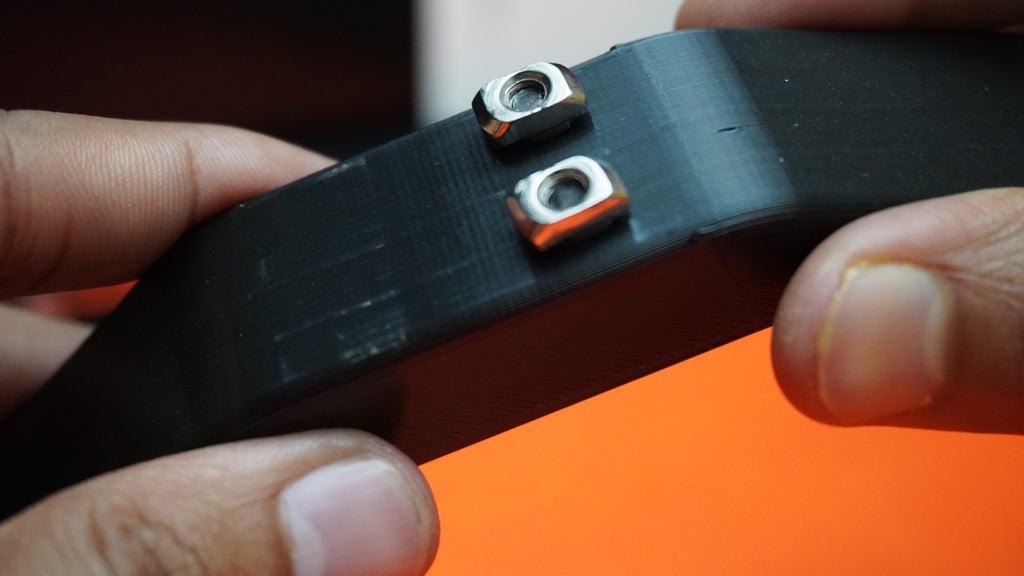 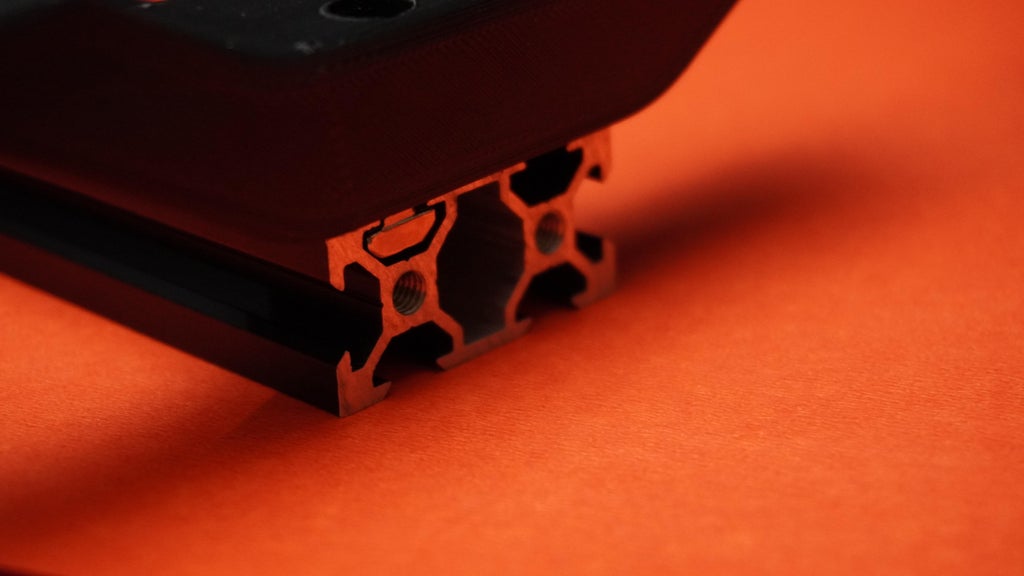 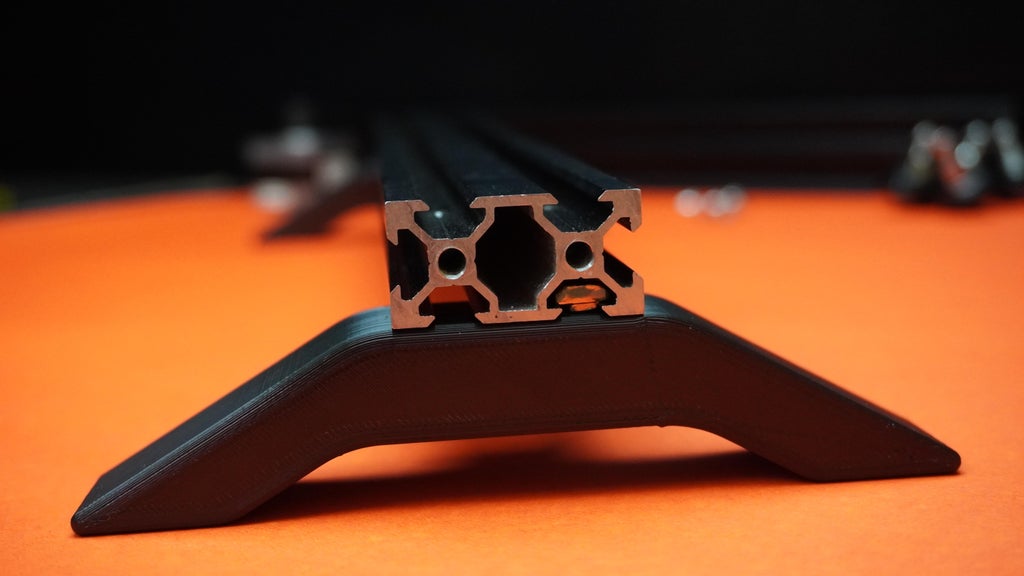 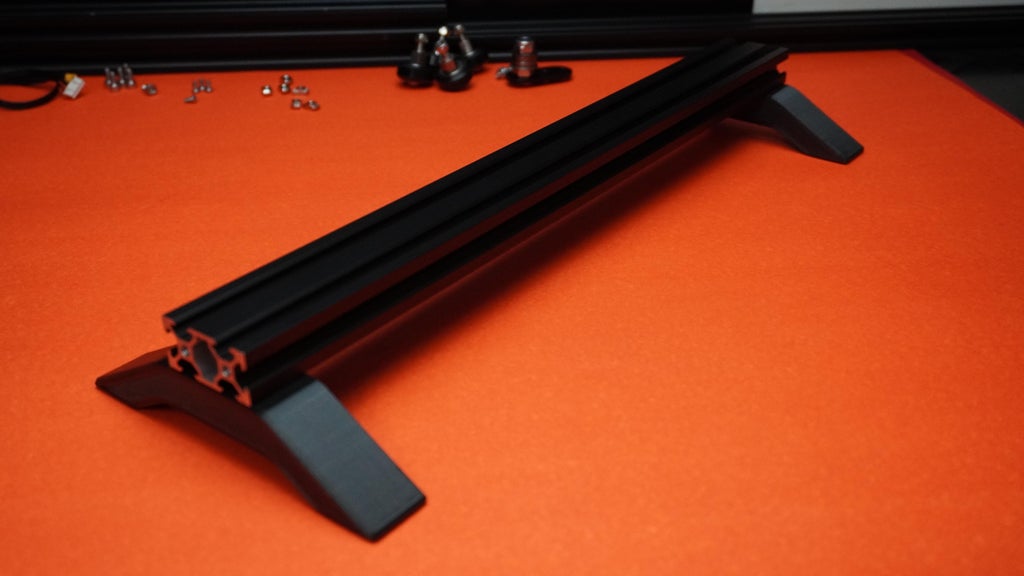 在这一步,我们将组装快速释放机制,这样可以轻松地将您的相机或其他设备从滑轨上安装和拆卸。 收集组件: 3D打印的快速释放板 3D打印的快速释放旋钮 3D打印滚轮 M4x15螺丝 安装滚轮: 拿取3D打印的快速释放板,它有用于安装滚轮的孔。 将滚轮放在孔上并固定在位。确保它们被牢固地固定,以防止使用过程中的任何移动。 安装快速释放旋钮: 接下来,将快速释放旋钮安装到快速释放板上。这个旋钮将使您能够轻松地将相机从滑轨上锁定和解锁。 将快速释放板滑入铝型材: 一旦组装完成,将快速释放板滑入铝型材,确保它紧密适合并且能沿着型材的长度平滑移动。 皮带张紧器滚轮是维持皮带适当张紧,确保相机滑轨平稳操作的重要组件。 下面是如何组装它: 取出您旧3D打印机中的皮带张紧器滚轮。 将其放在型材的端部,将皮带张紧器滚轮牢固地固定到铝型材上。确保它紧紧地固定,以防止在操作过程中的任何移动或滑动。 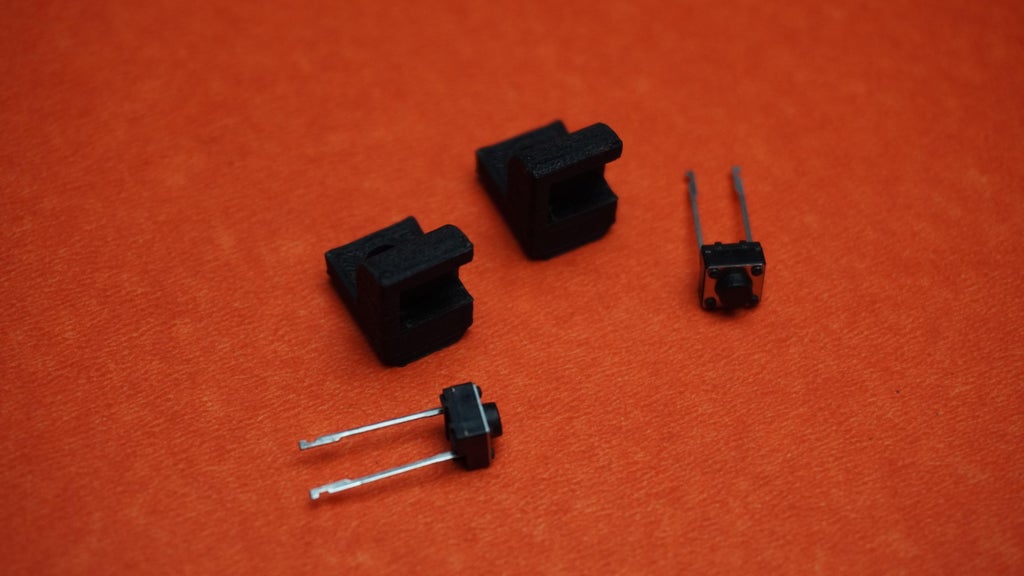 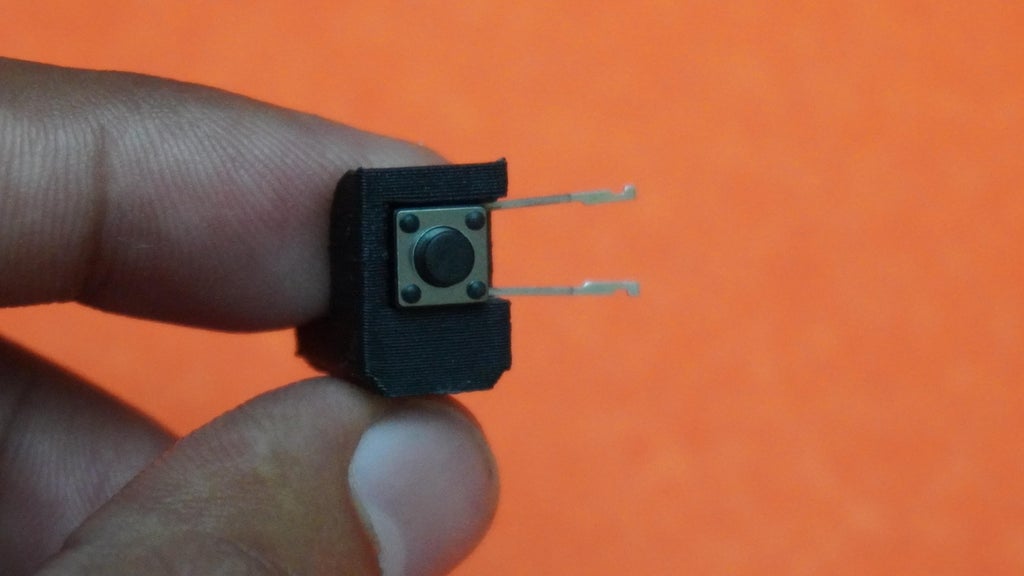 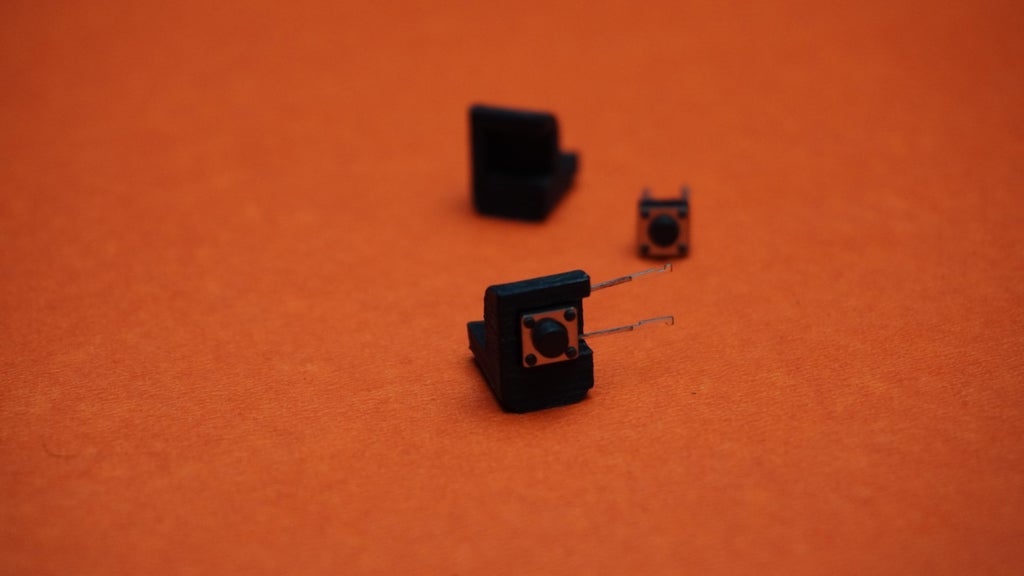 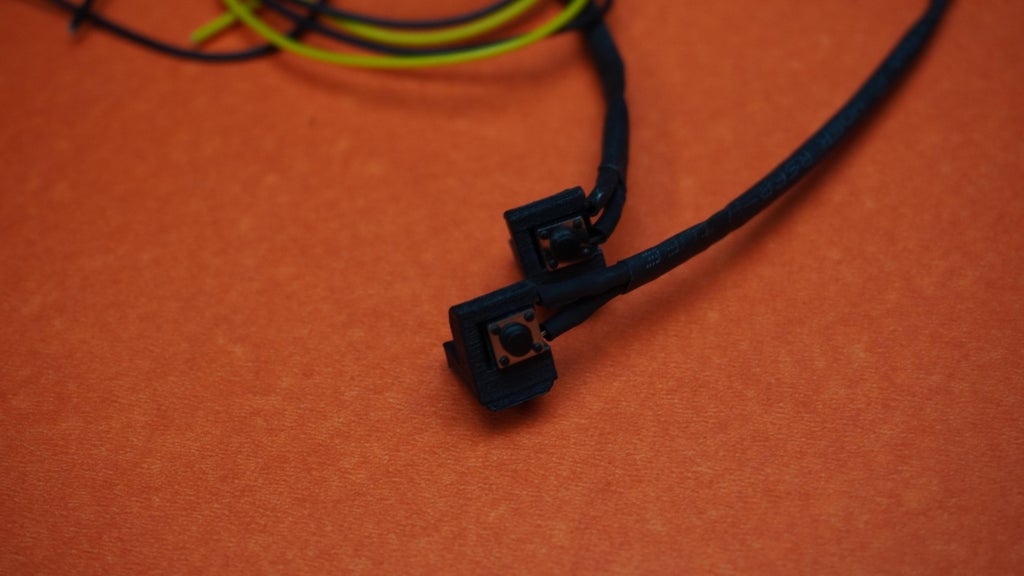 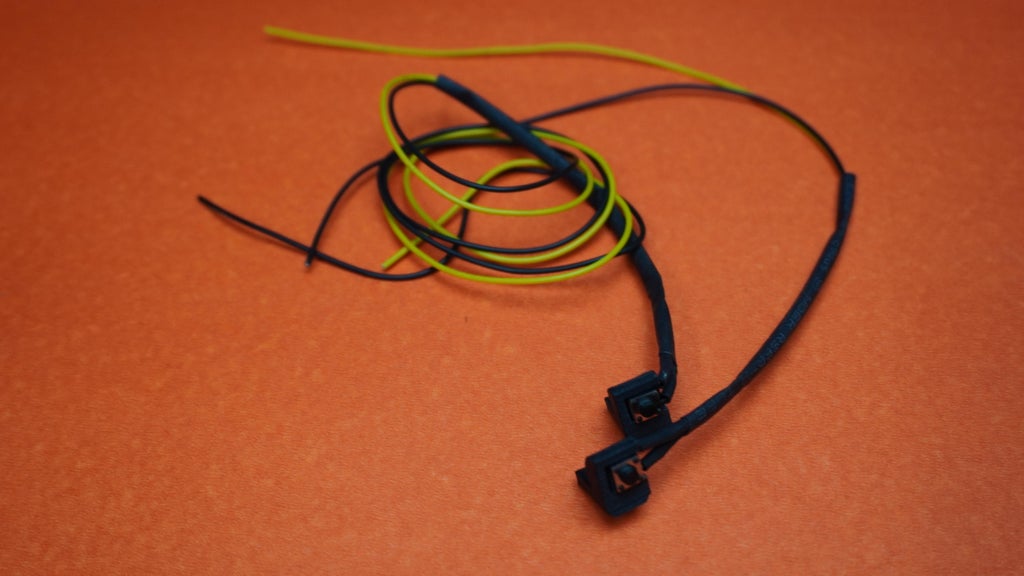 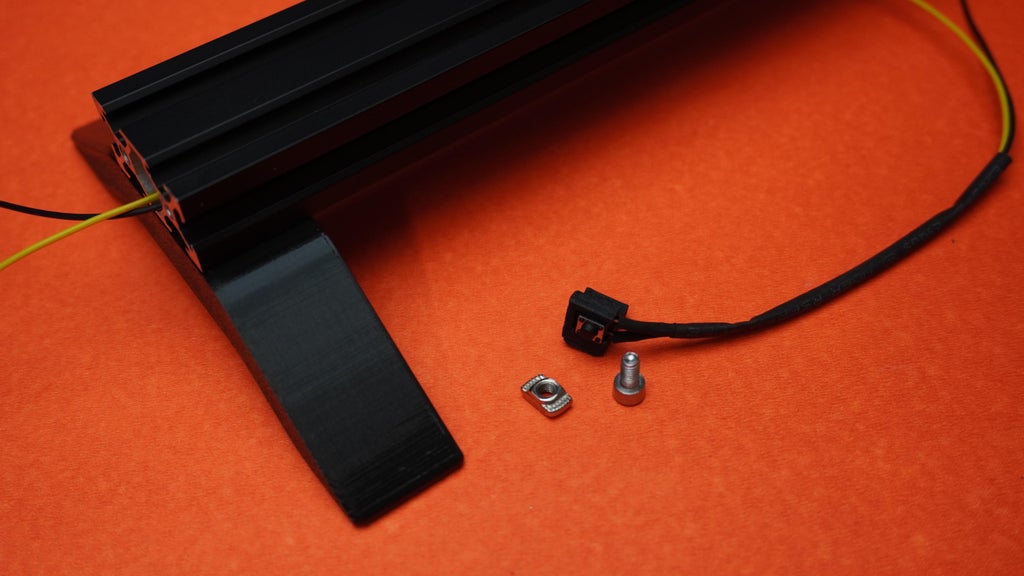 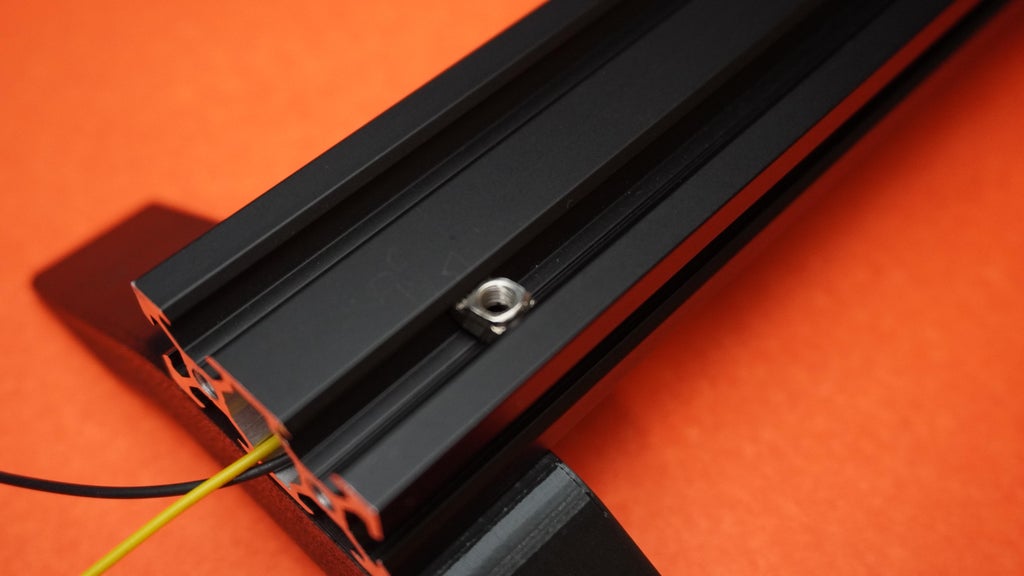 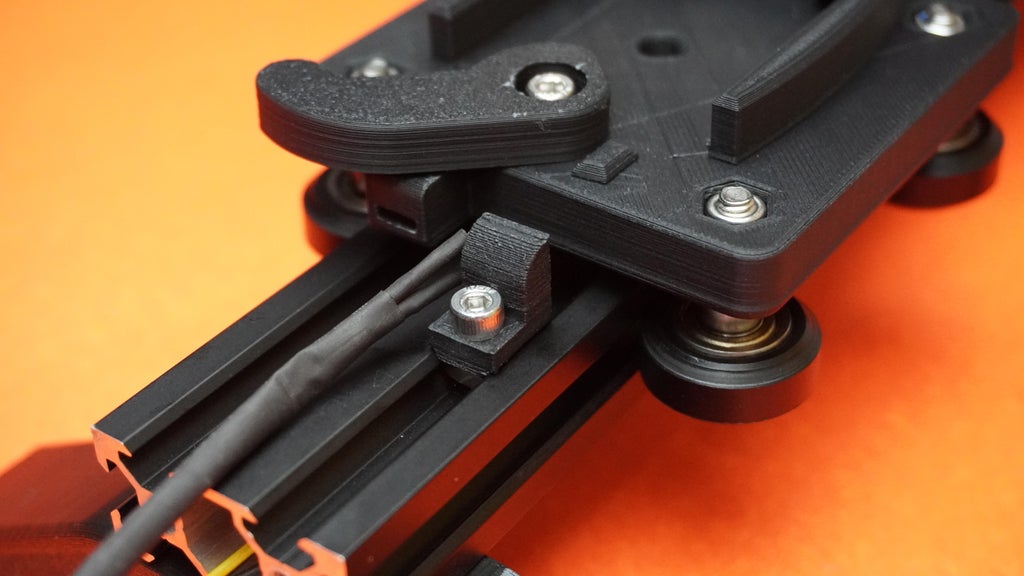 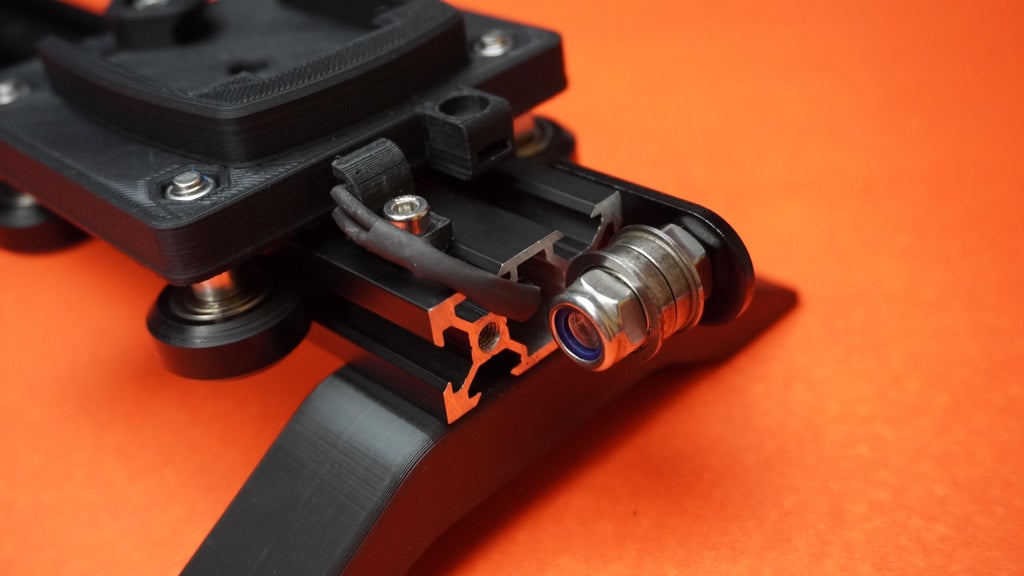  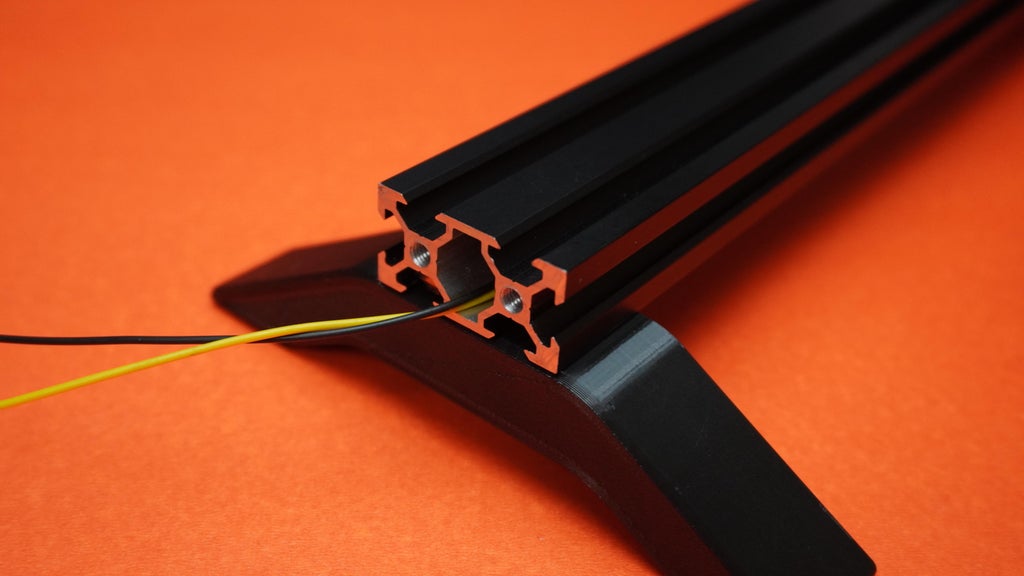 限位按钮对于确保摄像滑轨的安全操作至关重要,当滑轨到达行程的尽头时,它能自动停止。请按照以下步骤组装限位按钮: 收集组件: 2 x 5毫米按键 长电线 热缩管 2 x 3D打印的限位按钮架 快干胶 2个M4 T型螺母 2 x M4x8毫米螺丝 准备按键: 取两个5毫米的按键,将长电线焊接到每个端子上。这将方便以后连接到微控制器。 焊接完成后,将热缩管滑过焊接的连接点,然后加热以固定它们,确保连接处被绝缘和保护。 安装按键: 取3D打印的限位按钮架,用快干胶将每个按键固定到各自的架上。让胶水彻底干透后再进行下一步。 固定限位按钮: 将限位按钮架位置在铝型材的两端。使用T型螺母和M4x8毫米螺丝将架牢固地固定在位。确保按钮容易接触到,并且能正确对齐以在滑轨到达两端时激活。  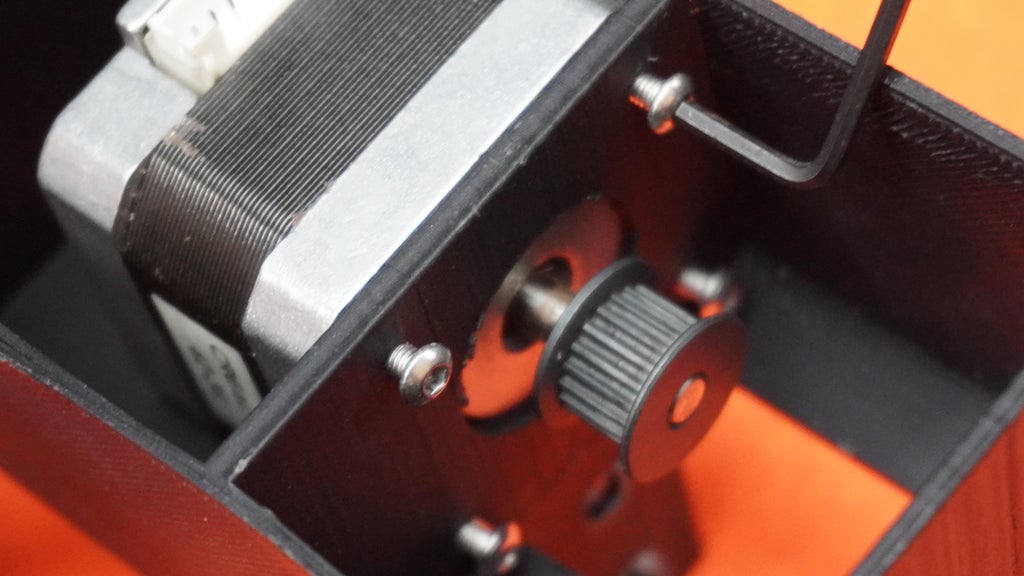 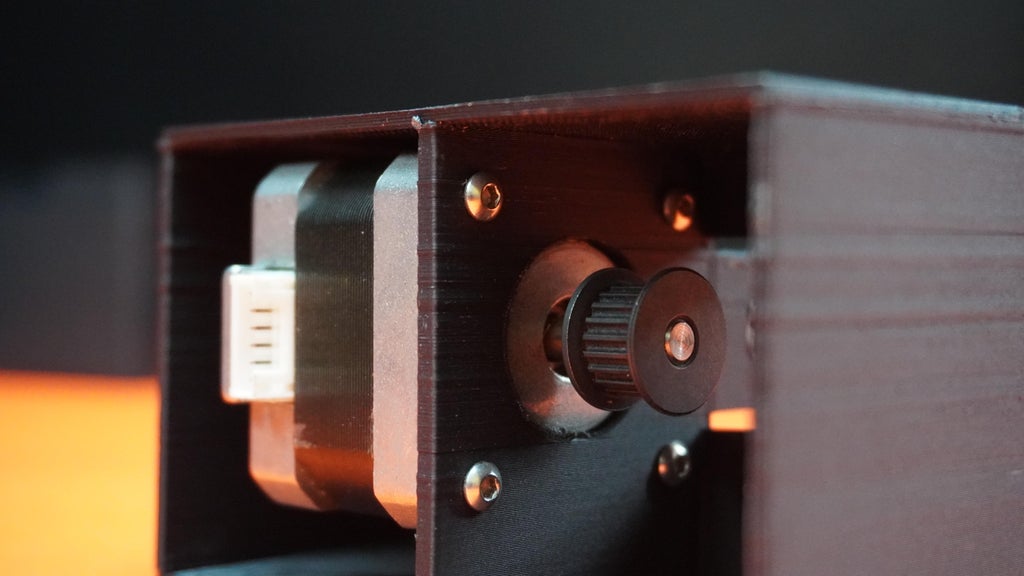 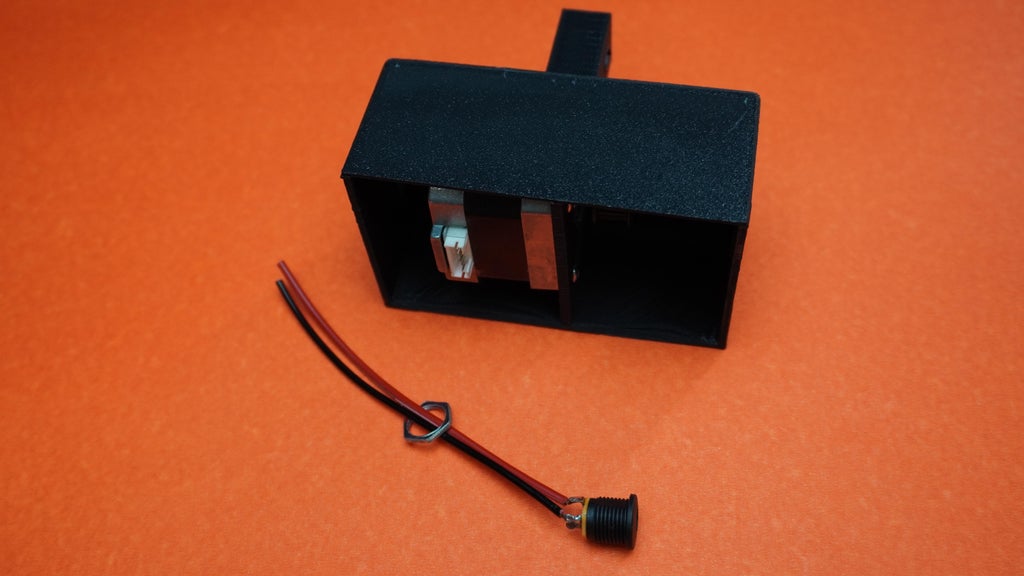  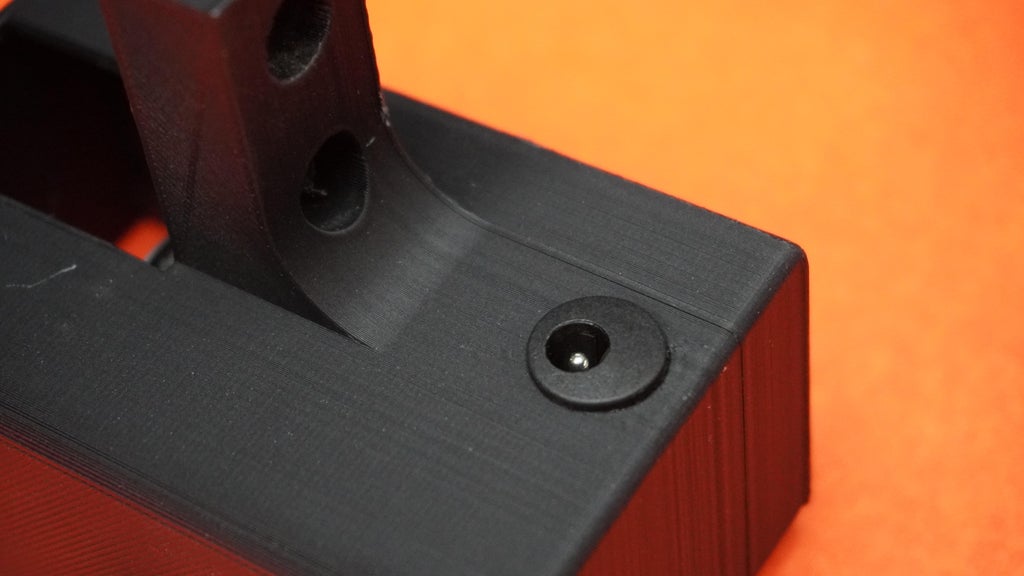 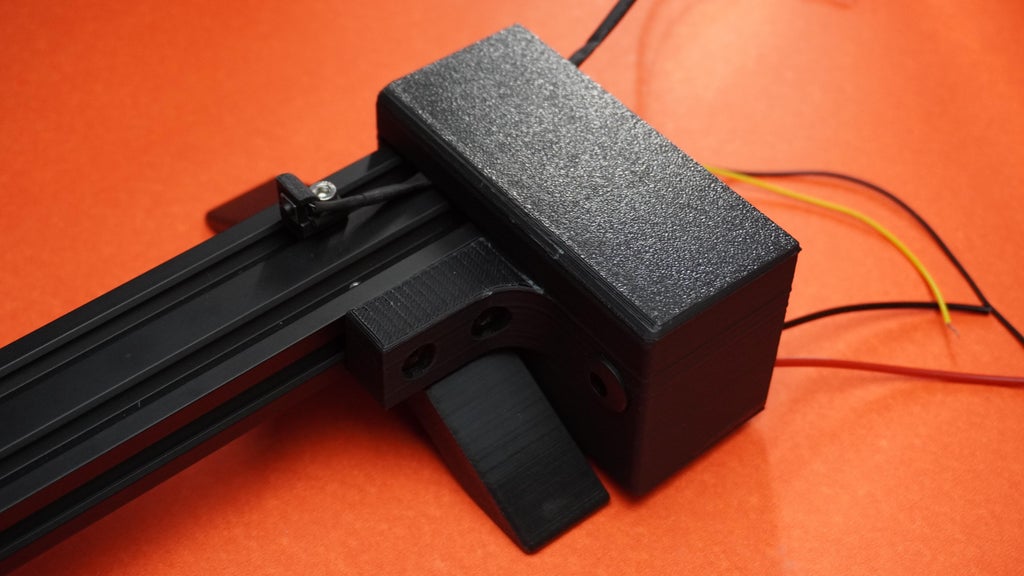 在这一步中,我们将安装步进电机,它将驱动相机滑块的移动。按照以下步骤完成电机组装: 收集组件: 3D打印电机座 步进电机(从您的旧3D打印机中回收) 来自旧打印机的螺丝(用于固定电机) 带有焊接线的12V DC女性连接器 2个M4 T型螺母 2个M4x15mm螺丝 安装步进电机: 取出3D打印的电机座,并将步进电机放入其中。使用您从旧打印机中保存的螺丝将电机牢固地固定在座位内。 连接电源: 接下来,取出带有焊接线的12V DC女性连接器。将其插入电机座上的指定插槽,并将其紧固。 固定电机组件: 电机安装好后,将整个组件放在铝合金型材的另一端,与您放置张紧滚轮的地方相对。使用2个M4 T型螺母和2个M4x15mm螺丝将电机座固定在铝合金型材上。 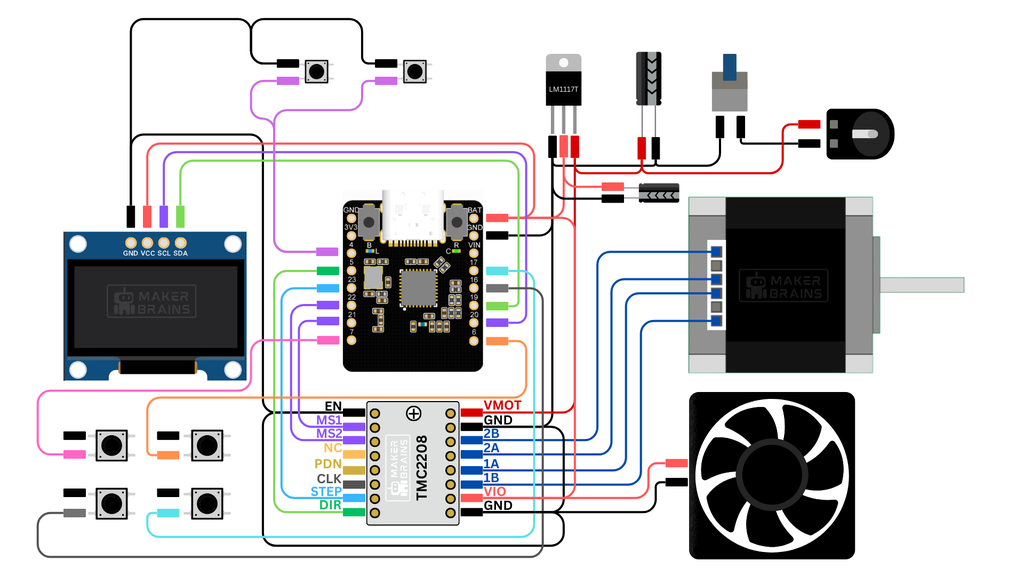 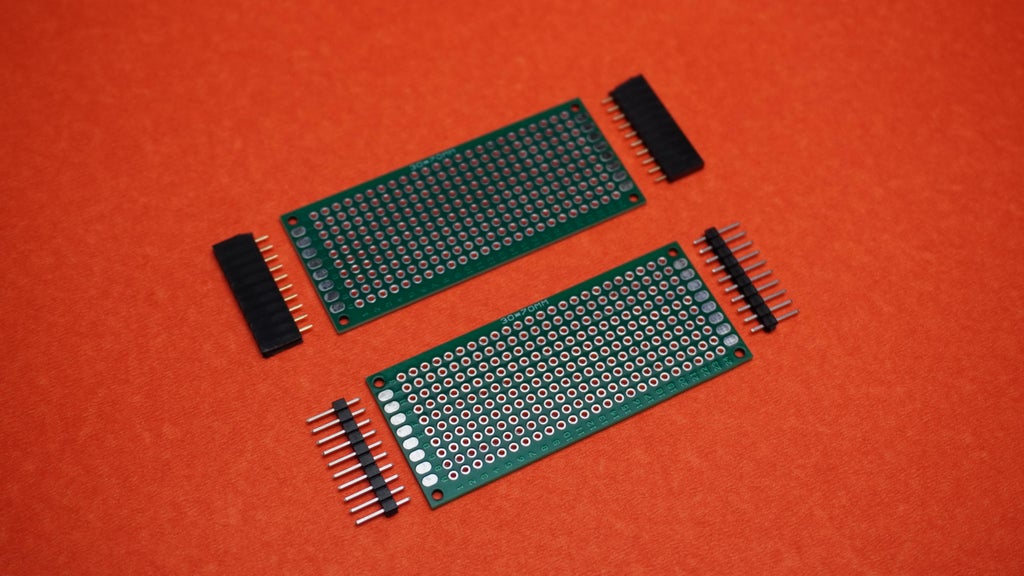 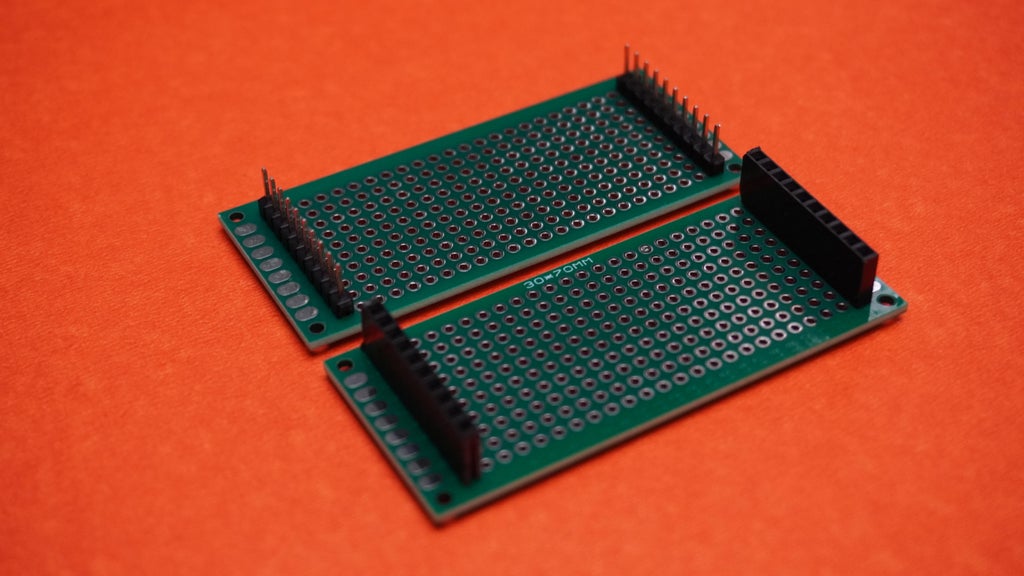 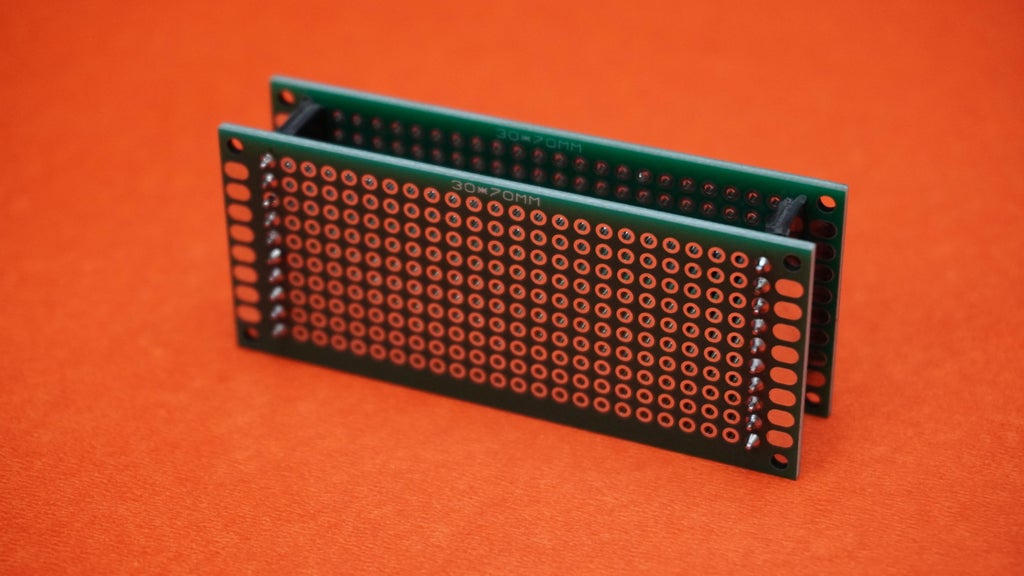 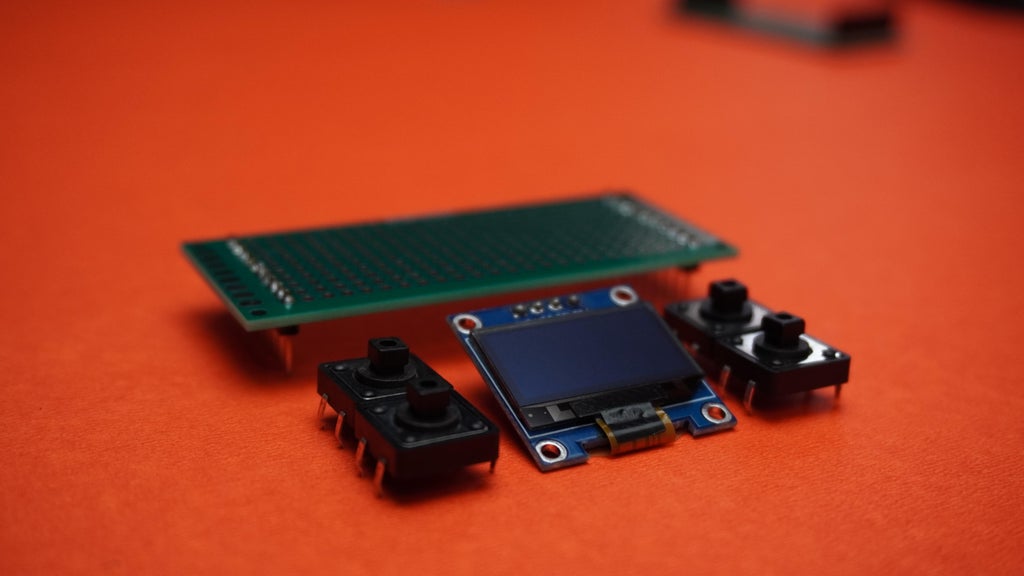 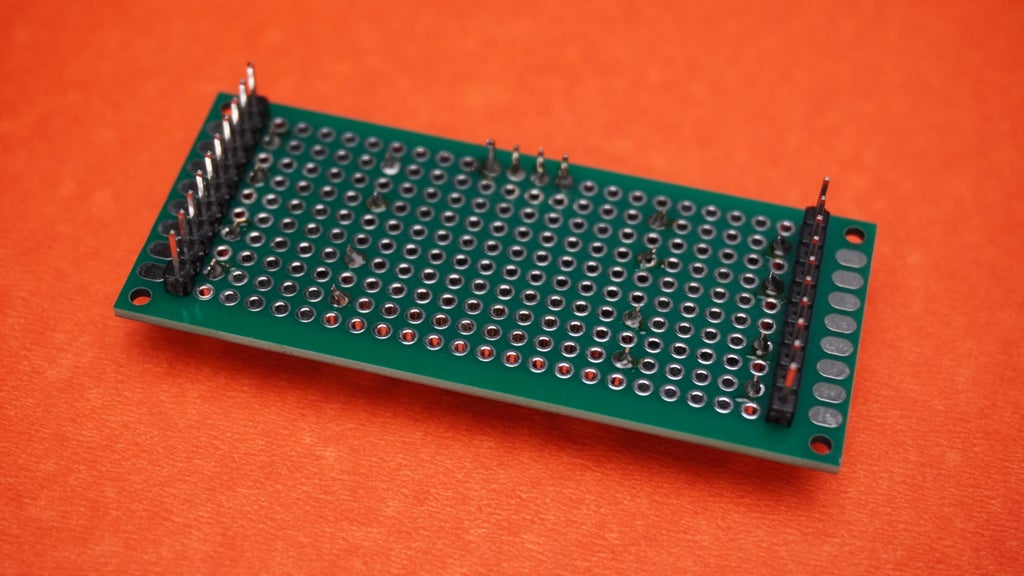 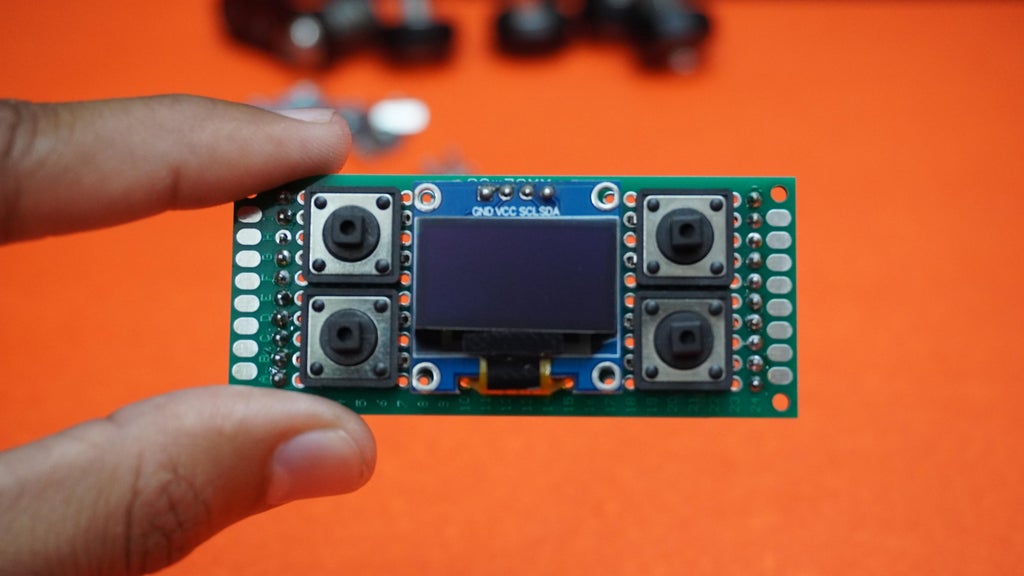 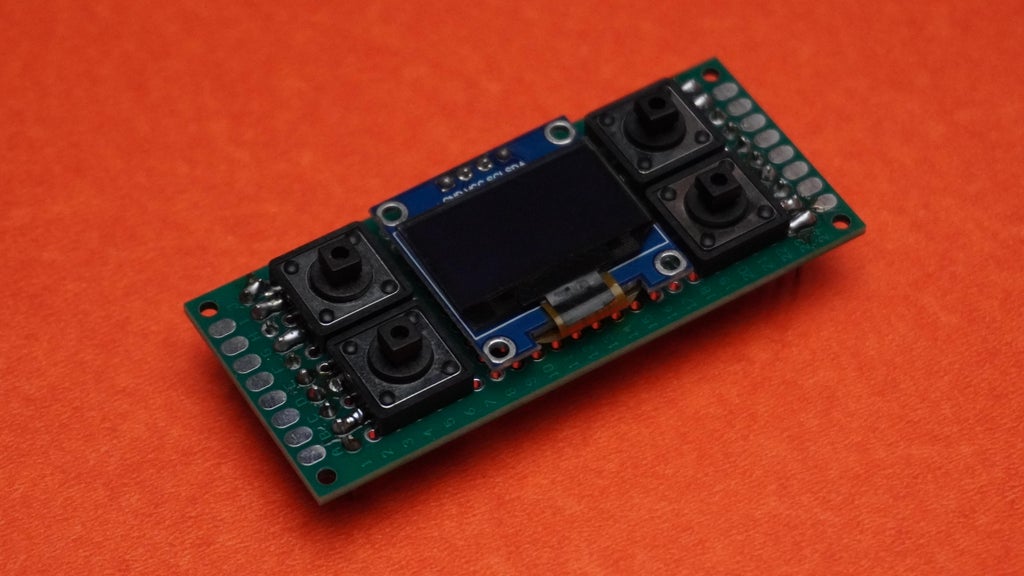 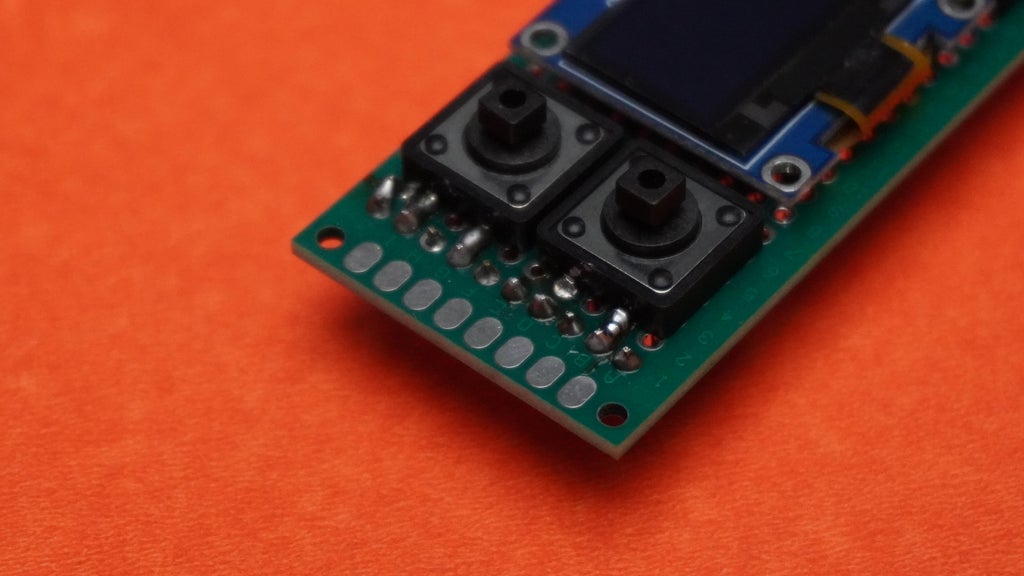 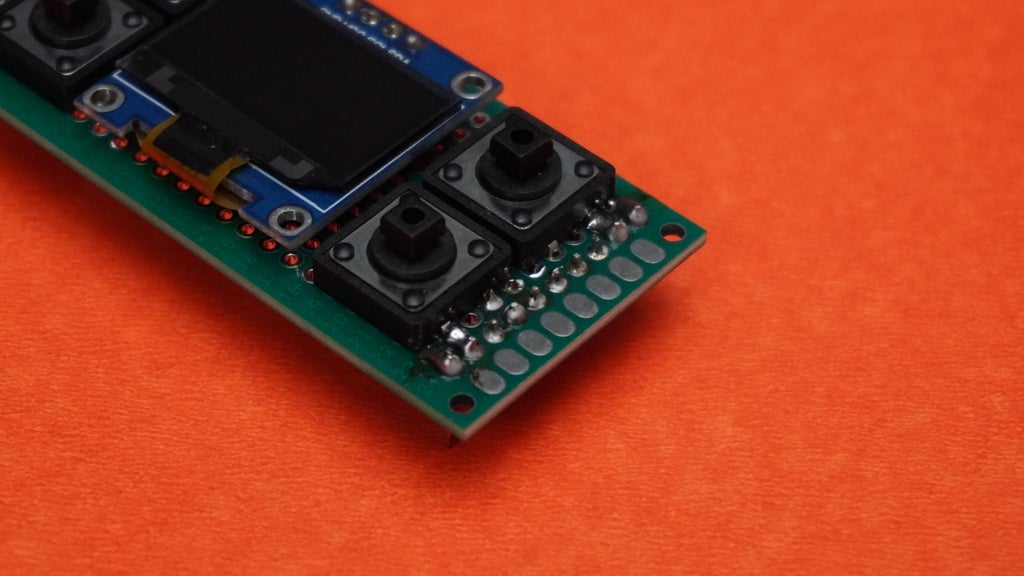 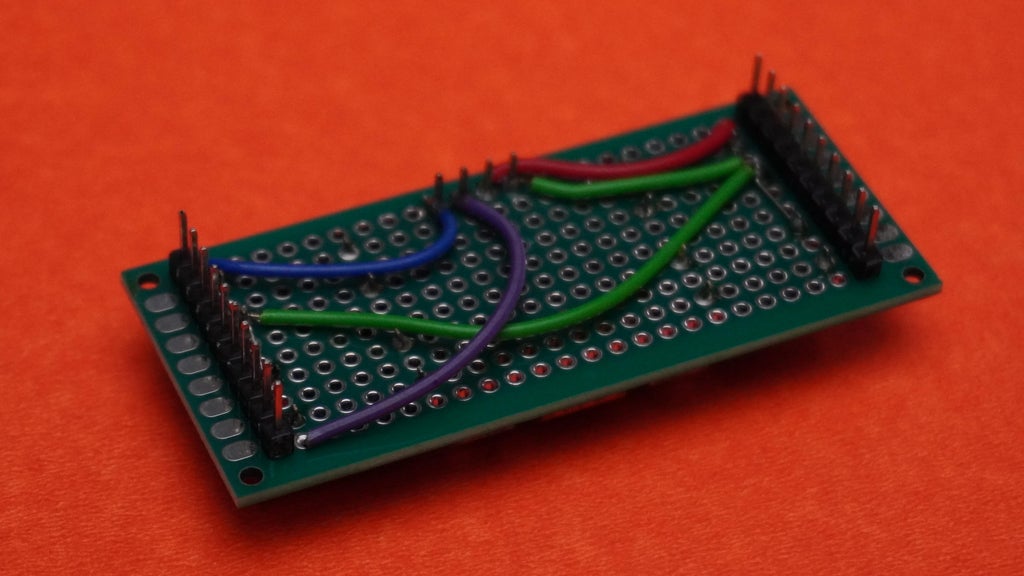 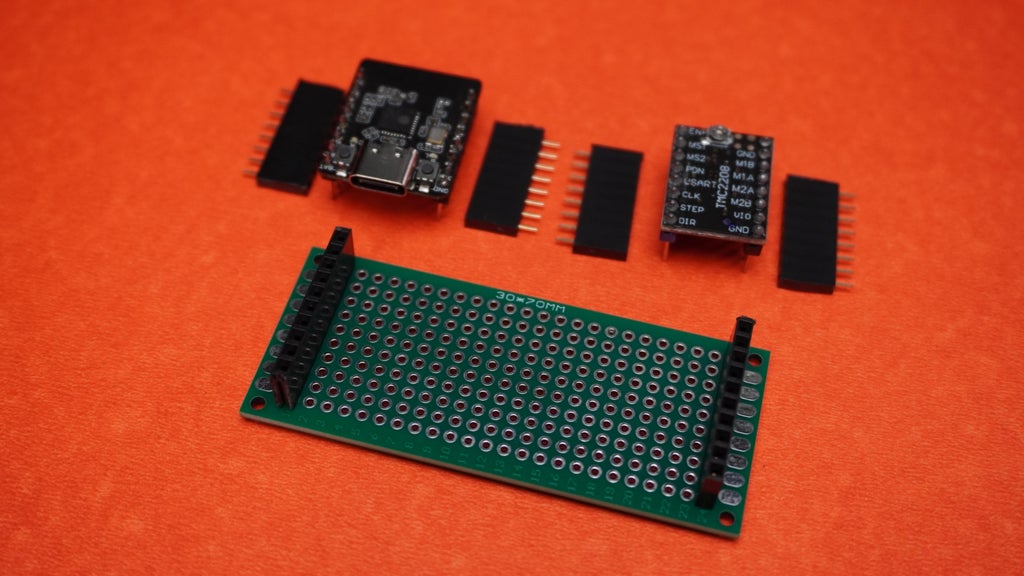 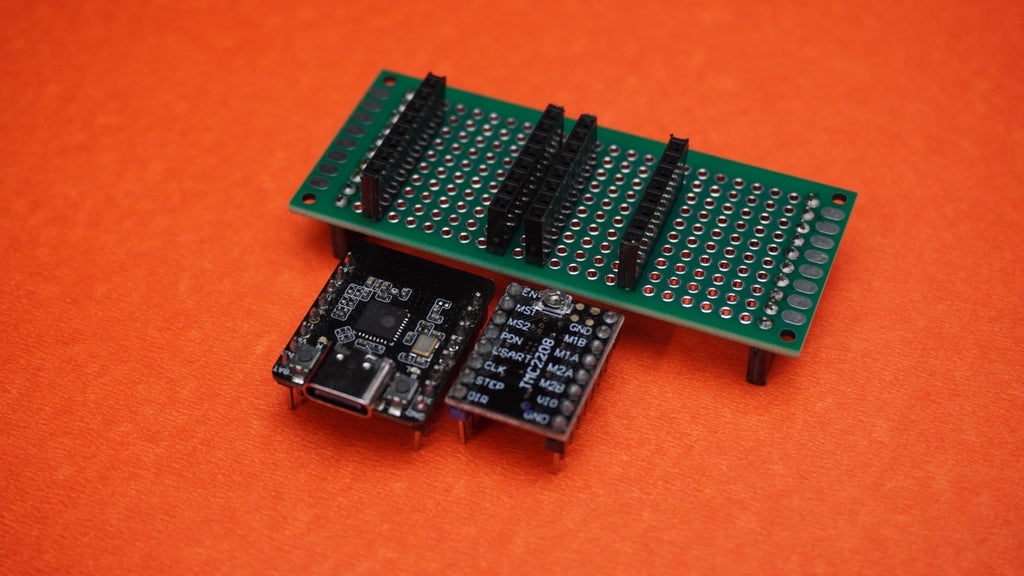 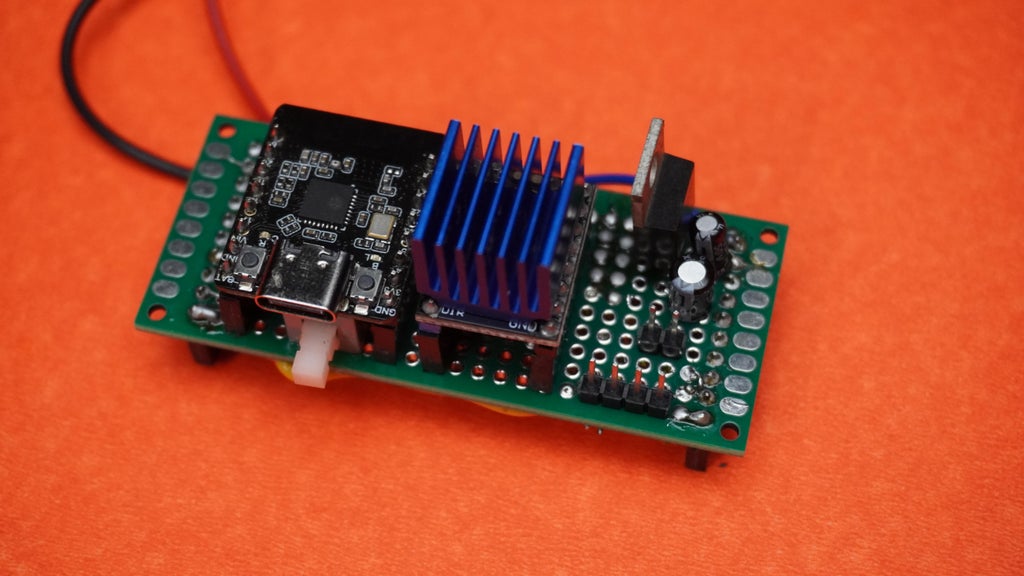 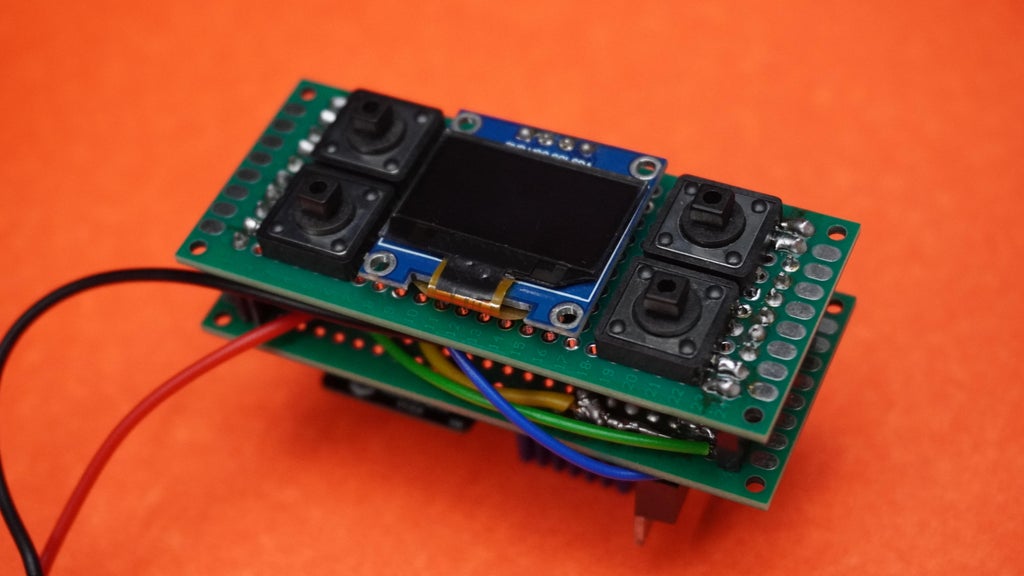 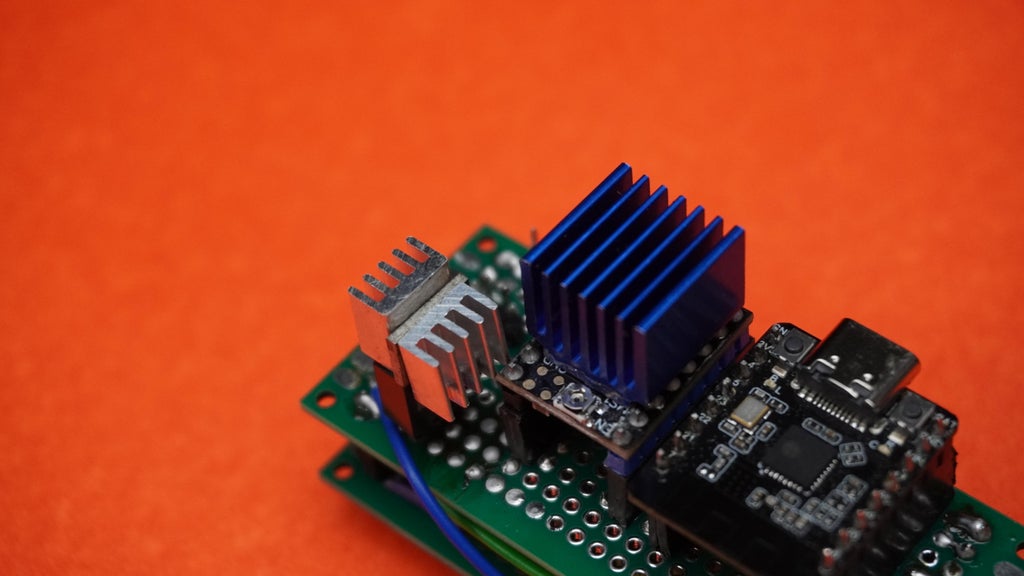 现在是连接各种电子组件的时候了,由于涉及的元素数量众多,包括ESP32-C6迷你微控制器、直流连线器、按键、LM1117电压调节器、TMC2208步进电机驱动器、OLED显示屏、开关、步进电机和电容器(100µF和10µF),所以一开始可能看起来有些复杂。下面是设置的方法: 收集组件: ESP32-C6迷你微控制器 4个按键 LM1117电压调节器 TMC2208步进电机驱动器 OLED显示屏 开关 电容器(100µF和10µF) 两块原型板(7x3厘米) 公母连接器 设置原型板: 在第一块原型板上安装OLED显示屏和四个按键(开始、停止、方向、限位)。在第二块原型板上,安装LM1117电压调节器、TMC2208步进电机驱动器、ESP32-C6,以及两个电容器(100µF和10µF),用于滤波。 连接板子: 使用公母连接器将两块原型板连接在一起,有效地"夹住"它们。这样每块板子上的组件都可以方便地连接和断开。 连接组件: 将OLED连接到ESP32的适当针脚,如果需要的话遵循I2C协议。 将四个按键接到ESP32的数字针脚,将每个按钮的一个端子连接到相应的针脚,另一个端子接地。 将TMC2208步进电机驱动器连接到ESP32。将直流连接器连接到LM1117电压调节器的输入,然后连接输出以供电给ESP32和其他组件。 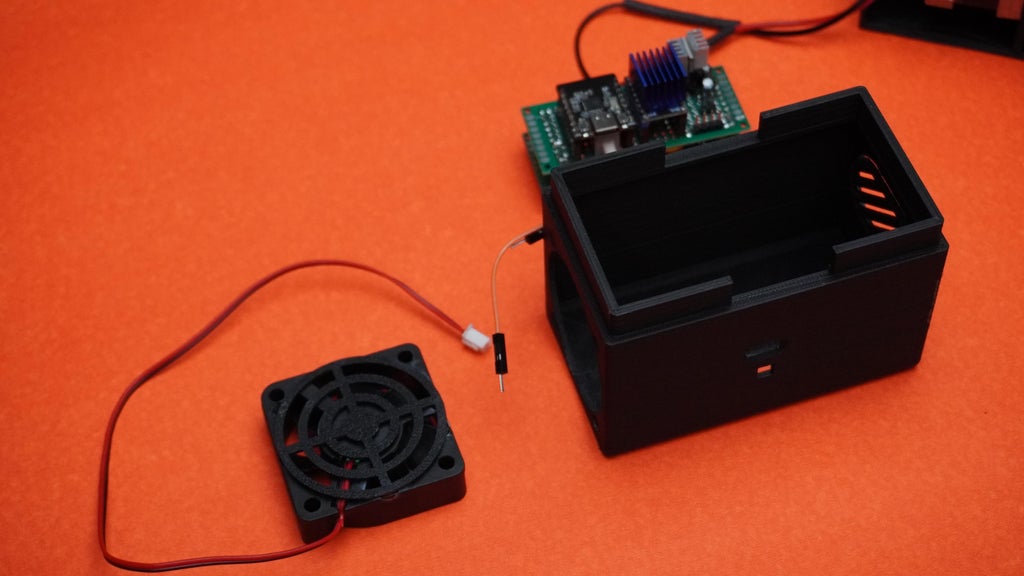  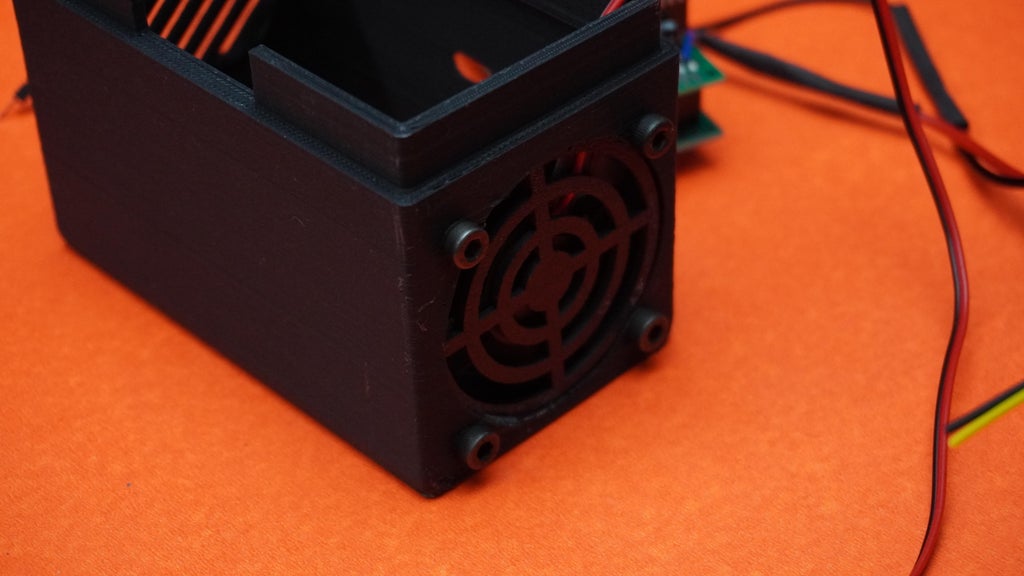  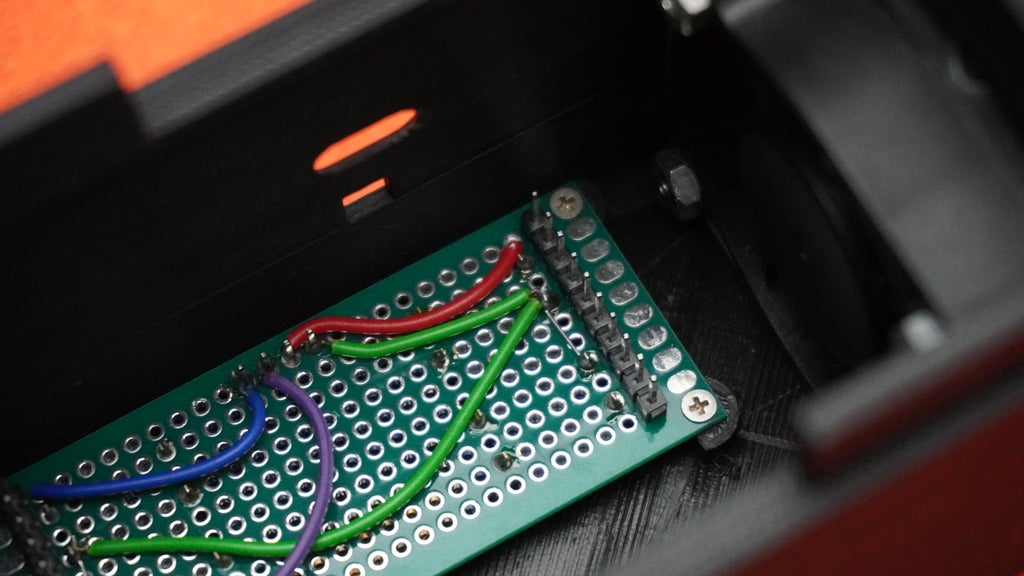  在这一步,我们将安全地将装配好的电路安装在3D打印的外壳内,确保所有组件都安置在正确的位置,以便使用和功能实现。 收集组件: 3D打印的外壳 装配好的电路(带有OLED和按键) 5050风扇 4个M4 15mm螺丝(用于固定风扇) 2mm螺丝(用于固定电路) 定位电路: 拿出3D打印的外壳,找出OLED显示屏和四个按键的切口。 小心地将装配好的电路放入外壳内,将OLED和按键切口与电路板上的相应组件对齐。 固定电路: 一旦所有部件都正确对齐,使用2mm螺丝将电路组件固定到外壳上。确保螺丝紧固得当,但要小心不要过度紧固并损坏任何组件。 固定风扇: 将5050风扇放在外壳内的指定槽位。 使用M4螺丝将风扇固定在位。 将风扇连接到电路板的3.3V电源输出,确保它能够正确工作。 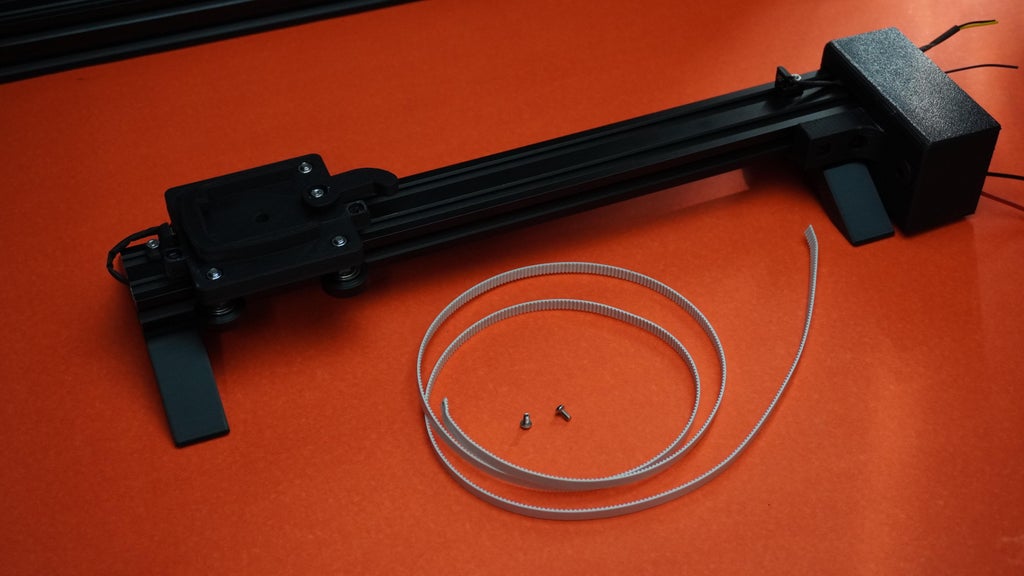 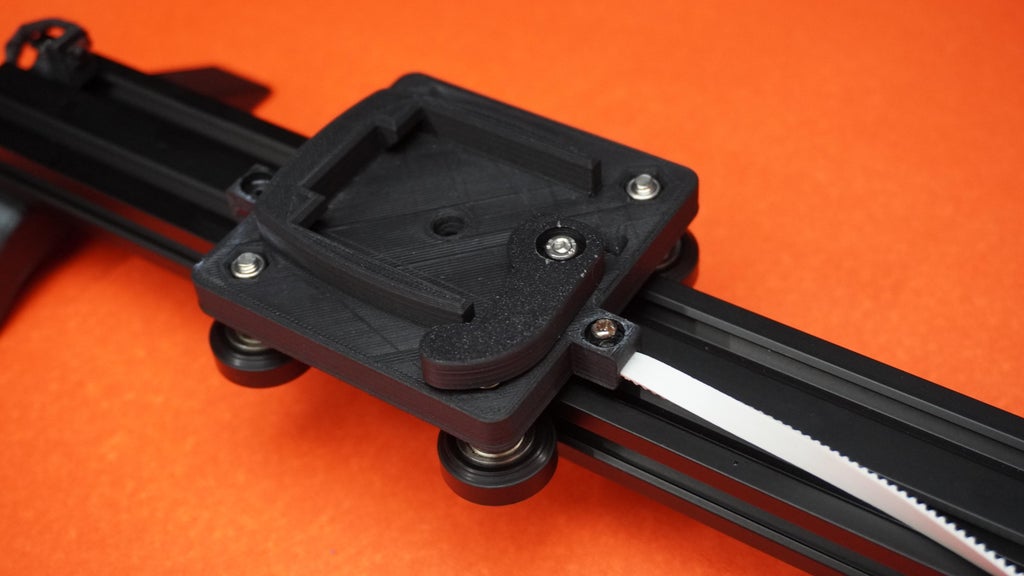 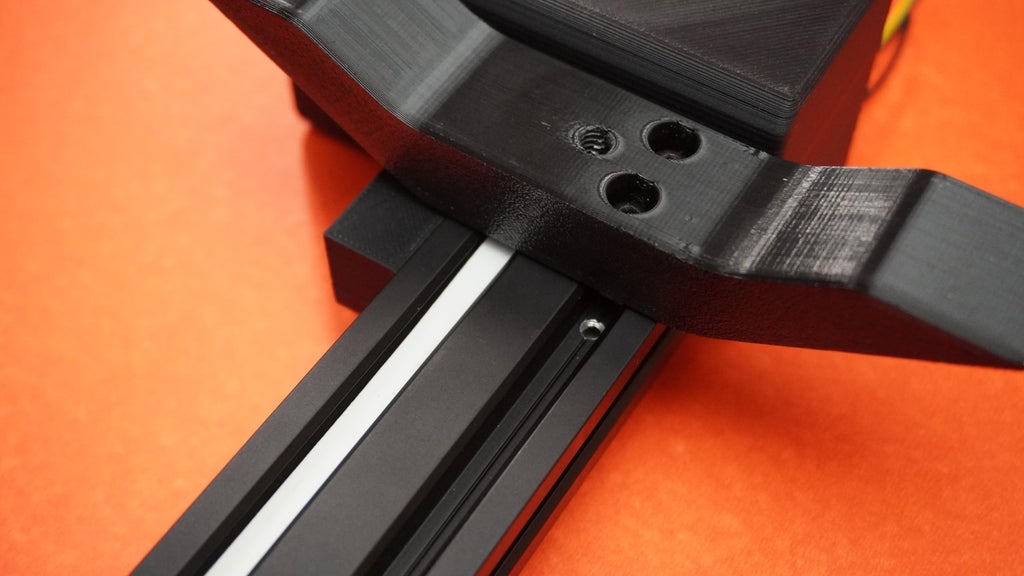 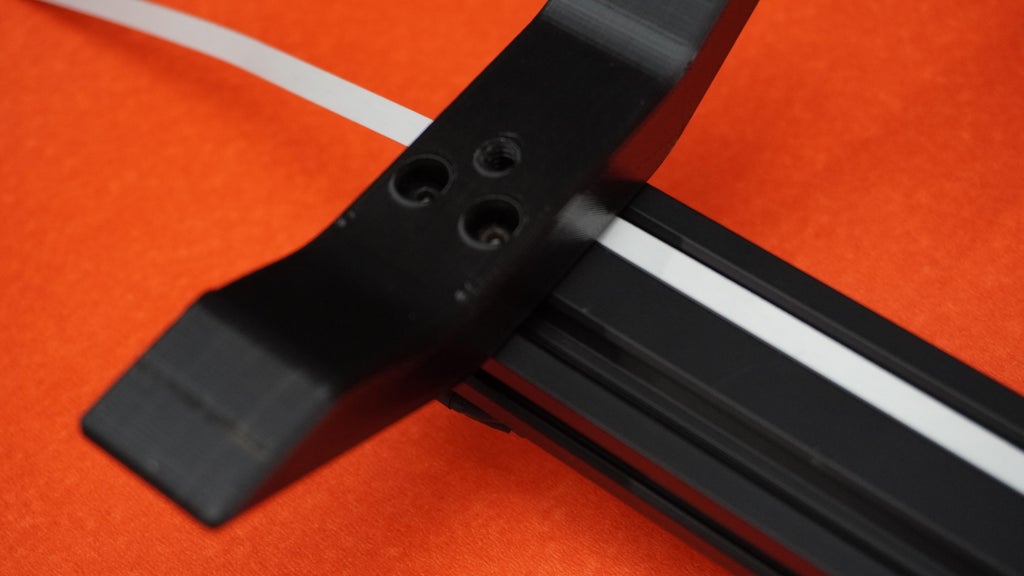   在这一步,我们将安装驱动滑块的皮带,并连接步进电机来完成组装。 组装皮带: 取出皮带,将其放在滑块上准备组装。首先将皮带的一端固定在快装板上的槽内。用2mm的螺丝将其固定,确保它紧固稳定。 然后,将皮带经过步进滑轮,确保它合适地安装。 让皮带通过腿部进入铝型材的切口,然后经过张紧滚轮。 最后,将皮带的另一端带回到快装板的另一槽,并用另一个2mm的螺丝固定。 连接步进电机: 从旧的3D打印机中取出步进电机连接器,并将其连接到电机上。确保连线与适当的相位匹配,以保证正确的功能。 将电机的线连接到原型板上留给步进连接的四个公头连接器上。确保连接牢固,以保证可靠的操作。  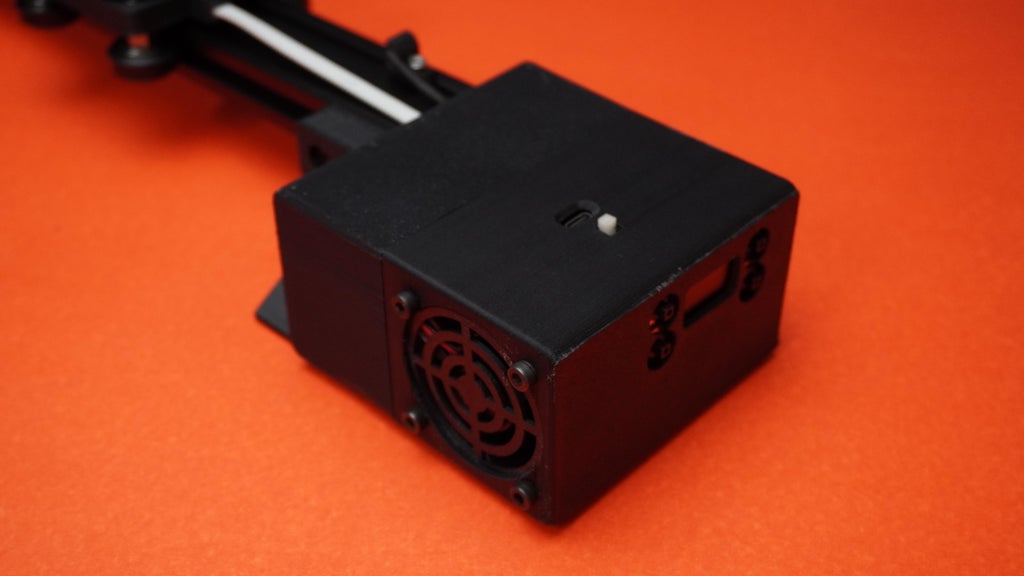 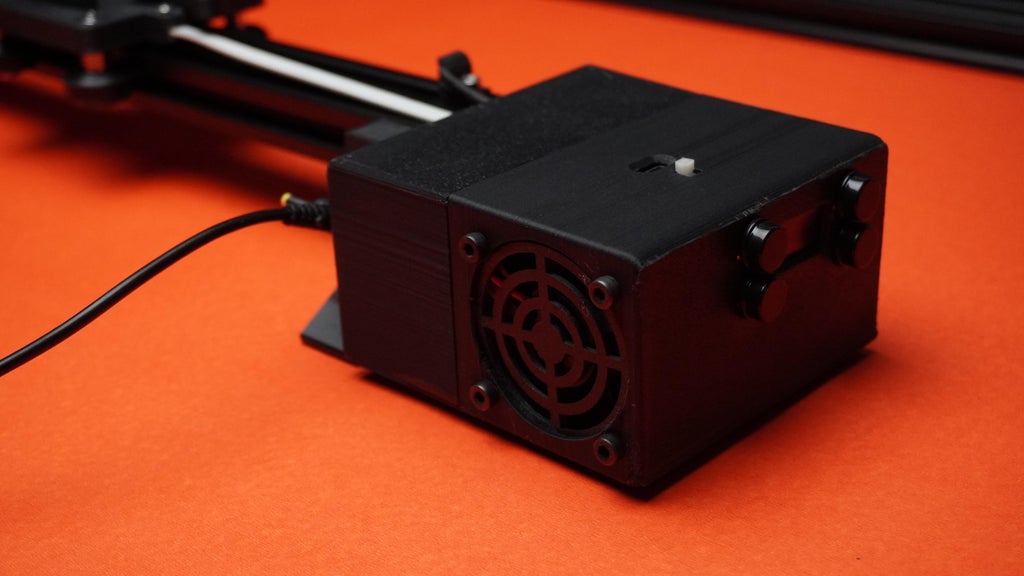 这一步涉及到关闭外壳,完成你的摄像机滑块项目。 确保所有的线都整齐地排列,外壳内没有松散的部件。这将有助于防止在关闭外壳时出现任何干扰或损坏。 拿起外壳部件,与电机座外壳对齐。 小心地将外壳压在电机安装座上,确保其合适和安全。当两部分卡扣在一起时,你应该能听到一声“咔嚓”,这表明配合得宜。 关闭外壳后,做最后的检查,确保所有组件都固定在位,没有暴露的线或松动的连接。 检查OLED显示屏和按键是否可以访问并正常工作。 外壳安全关闭后,你的DIY摄像机滑块现在已经完成,可以使用了!   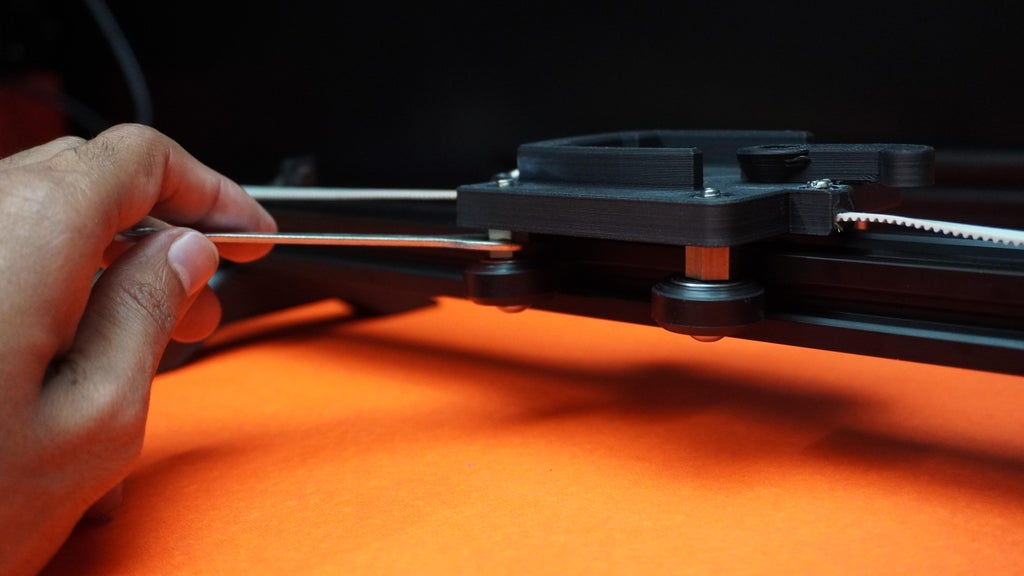 在这一步,我们将调整限位开关,检查皮带张力,并对快装板进行微调,然后使用ESP32进行功能测试。 调整限位开关: 检查滑块两端的限位开关的位置。确保它们在滑块到达行程终点时精确触发。 如果限位开关需要重新定位,松开螺丝,将它们调整到正确的位置,然后在对齐后将螺丝牢固地拧紧。 检查皮带张力: 皮带应有足够的张力以防止滑动 在避免对马达产生不必要的压力。 如果需要调整,你可以重新定位张紧轮或对皮带张力进行微调。确保它在操作过程中保持稳定并平稳运动。 调整快速释放板: 使用随你的3D打印机附带的工具,旋转快速释放板的滚轮以需要的紧度进行紧固,同时保持平稳、均匀的滑动。 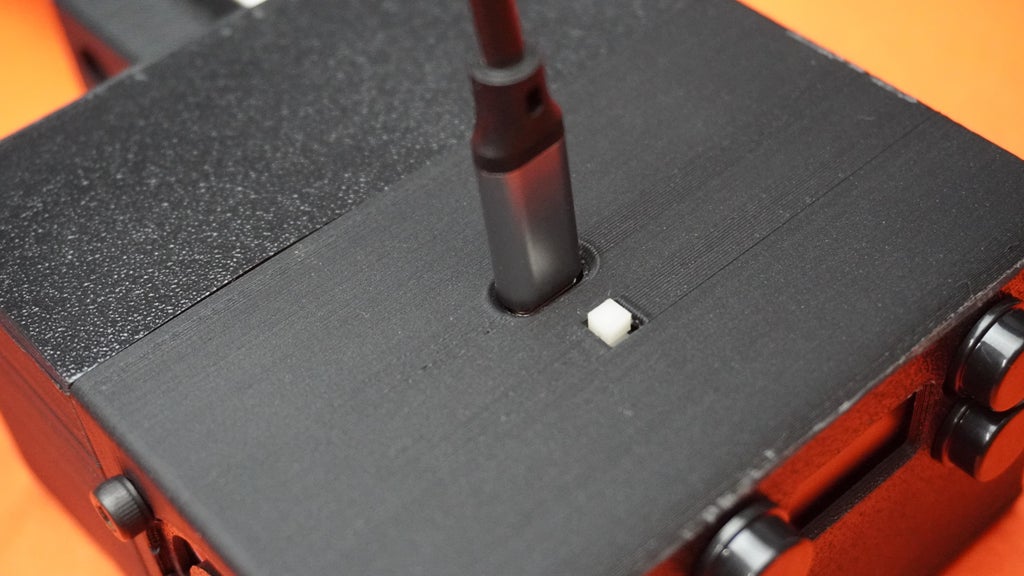 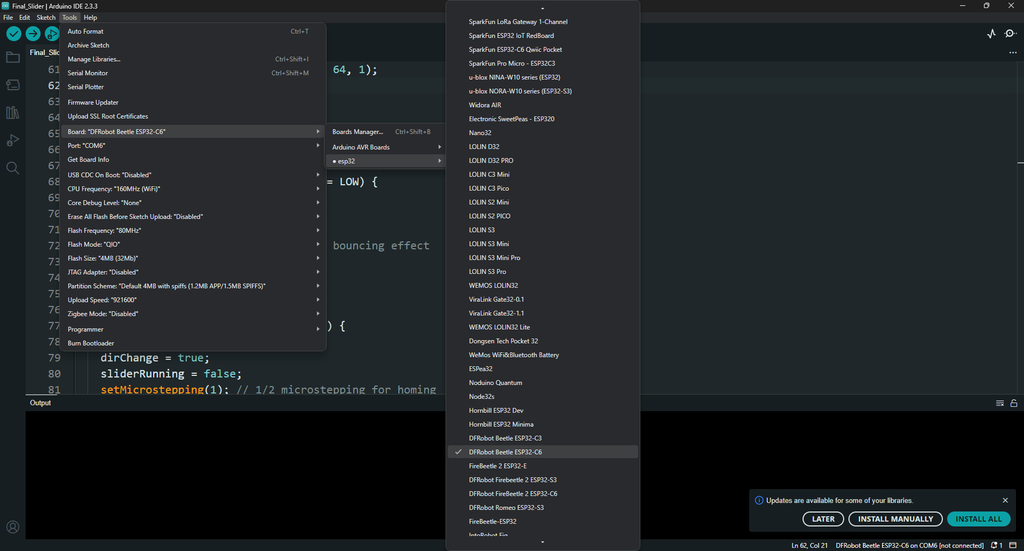 最后的调整完成后,是时候测试你的摄像机滑轨的功能了。按照以下步骤连接电源,上传代码,并确保一切运行顺畅。 上电并连接: 将12V电源连接到电路上。 用USB线将你的ESP32开发板连接到你的计算机上。 将代码上传到ESP32: 从[url=https://github.com/MukeshSankhla/DIY-Camera-Slider]我的GitHub仓库下载代码。 在Arduino IDE中打开代码。 确保已安装最新版本的ESP32板管理器。如果需要,这里有一篇文章教你[url=https://randomnerdtutorials.com/installing-the-esp32-board-in-arduino-ide-windows-instructions/]如何在Arduino IDE中安装ESP32板。 确保安装了代码中指定的所有需要的库(Adafruit_GFX和Adafruit_SSD1306)。选择板型为DFRobot Beetle ESP32-C6。 选择正确的COM端口并将代码上传到ESP32。 现在,你的摄像机滑轨已经完全组装完成,是时候了解如何有效地操作它了。滑轨有几个按钮可以控制其速度、方向和功能。以下是操作控制的详解: 速度按钮(步进延迟): 这个按钮允许你调整滑轨的速度,范围从500毫秒到10,000毫秒。每按一次按钮,步进延迟会增加500毫秒。一旦延迟达到10,000毫秒,再按一次按钮就会将其重置为500毫秒 。 微步进按钮: 滑轨包括四个级别的微步进按钮,允许你为步进电机选择所需的微步进分辨率。这个功能提供了对摄像机运动和定位的更精细控制。 回原点按钮: 回原点按钮启动滑轨的回原点过程。在此过程中,滑轨会移动直到触及限位开关,此时它会自动停止,确保摄像机处于已知的起始位置。 开始/停止按钮: 这个按钮开始或停止滑轨的运动。当滑轨运行时,按这个按钮会立即停止运动。 限位开关功能: 在回归过程中,如果到达限位开关,滑轨将自动停止,确保安全并防止任何损坏。 在操作过程中,如果滑轨到达限位开关,方向将自动反转。这个功能允许滑轨在没有人为干预的情况下持续来回移动。    恭喜你成功制作了你的DIY单向摄像机滑轨,使用的是旧的3D打印机部件!这个项目不仅展示了你的创造性和工程技能,也突显了几个关键优势,使其成为你的电影制作工具箱中的宝贵补充。 预算友好:通过重新利用旧3D打印机的组件,你已经显著降低了与购买商用摄像机滑轨相比的成本。这个项目展示了如何在不破产的情况下创建一个功能强大而有效的工具。 可重用性:利用旧的3D打印机的部件 打印机体现了DIY项目中的可持续性和可重用性原则。它通过展示如何将废弃的材料转化为有用的物品,从而减少浪费,鼓励创造力。 增强功能:摄像机滑轨拥有令人印象深刻的功能,如可调速度,微步精确控制,以及自动限位开关功能。这些元素提升了整体性能,允许平滑、控制的摄像机移动,可以大大提高你的拍摄质量。 有效的热量管理:在机壳内部加入5050风扇确保了操作过程中的适当热量散发。这个特性有助于保持电子组件,特别是步进电机的最佳性能和寿命,防止过热。 多样化的使用:无论你是在拍摄延时摄影,电影镜头,还是产品视频,这个相机滑轨都能适应各种拍摄风格和需求。它的设计允许无缝的调整和配置,以适应不同的项目要求。 如果你喜欢这个项目,不要忘记点击喜欢按钮并在下面留言。 谢谢你!下次见 ;) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






