|
16550| 5
|
[入门教程] 玩转micro:bit-用BXY玩360度舵机小车 |
 幸福都是奋斗出来的,我要用代码写小车程序。 器材准备: 1、Micro:Mate 1 micro:bit 1  2、360舵机 2 3、舵机转接乐高十字轴 2 乐高轮 2 4、Laserblock件 螺丝 5、电池盒及3节电池 USB供电口正好可以接扩展板  一、编程,如何使360度舵机转动起来,我前面用图形化编程和360舵机做过小车,知道360舵机在接近90度时停止,在0度和180度时正反转速度最快。 可是如何在BXY中用代码写,真不会呢,好在我有shou主意。用盛思的软件找下相关句子。;P 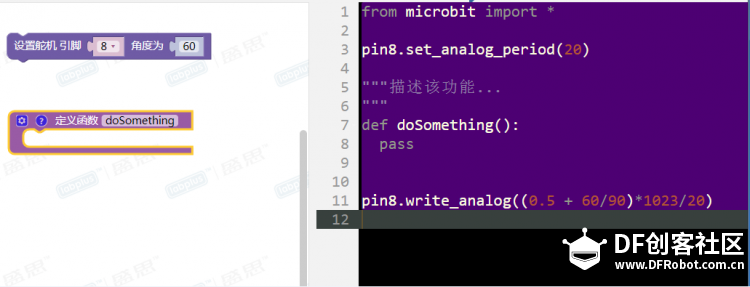 好了,在BXY中写,BXY中有提示,很适合我这样的小白呢。 说实话,控制舵机的代码还真不明白。 不过有了这两个句子,后面就好办了。 先让舵机转起来。 [mw_shl_code=applescript,true]from microbit import * #write your program: pin8.set_analog_period(20) while True: pin8.write_analog((0.5 + 60/90)*1023/20)[/mw_shl_code] 好的,能转,可以写下去了。 我要定义前进,后退,停止三个函数。 (刚刚查过如何定义函数;P) [mw_shl_code=applescript,true]from microbit import * #write your program: pin8.set_analog_period(20) pin12.set_analog_period(20) def go(): pin8.write_analog((0.5 + 0/90)*1023/20) pin12.write_analog((0.5 + 180/90)*1023/20) def back(): pin8.write_analog((0.5 + 180/90)*1023/20) pin12.write_analog((0.5 + 0/90)*1023/20) def stop(): pin8.write_analog((0.5 + 90/90)*1023/20) pin12.write_analog((0.5 + 90/90)*1023/20) while True: if accelerometer.current_gesture()==("face down"): stop() elif button_a.is_pressed(): go() elif button_b.is_pressed(): back()[/mw_shl_code] 下载运行,还好,按A按钮转,按B按钮反转,屏幕向下停。 二、如何停下来,还要多次测试 有两种办法,第一种:把停止的语句单独写个小程序,传到bit上,不断修改 pin8.write_analog((0.5 + 90/90)*1023/20) pin12.write_analog((0.5 + 90/90)*1023/20) 这两个红色数字,至能够停下来为止。 第二种:小心拆开舵机,调整里面的电位器,至在90度时能停下来为止。 我两种都用过,上面程序中用了拆舵机调整的方法。 三、准备器材 ,用Laserblock搭小车。 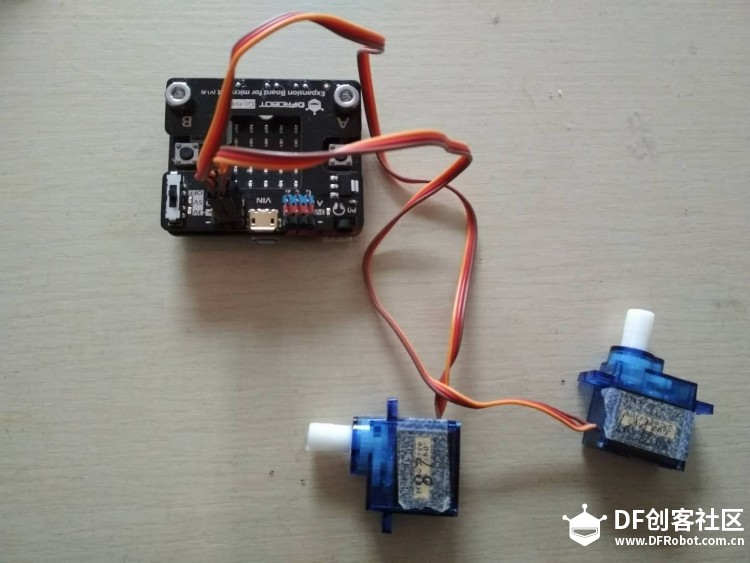 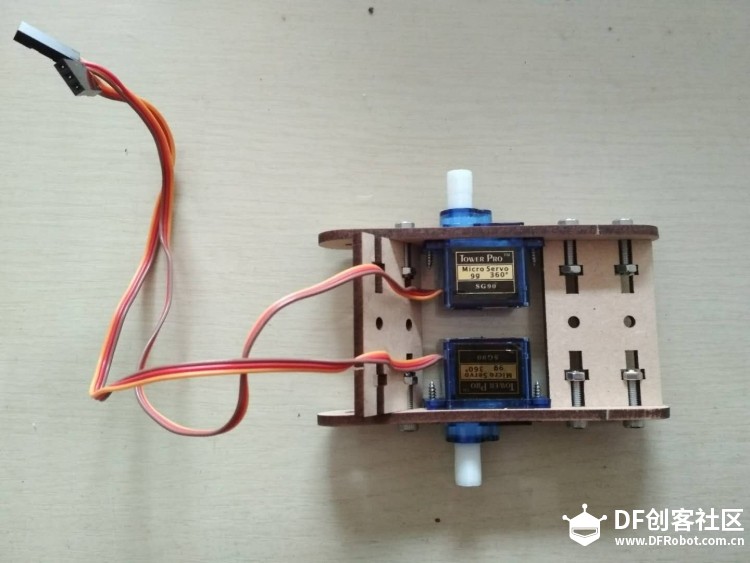 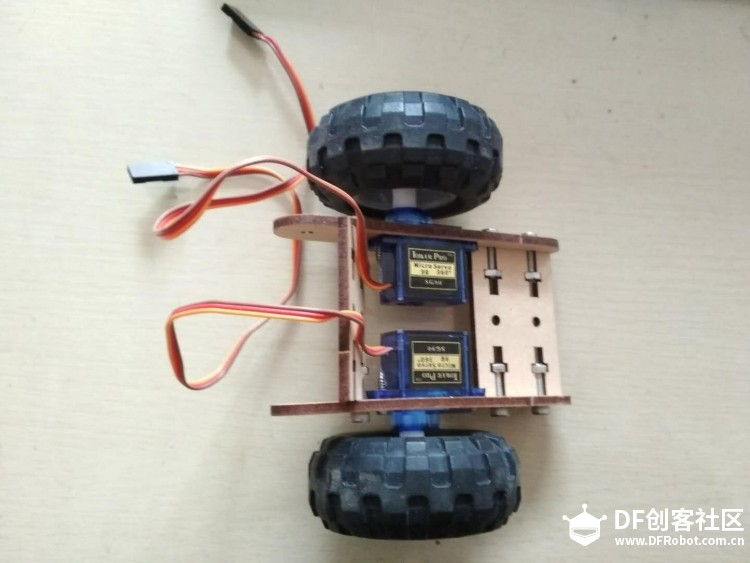 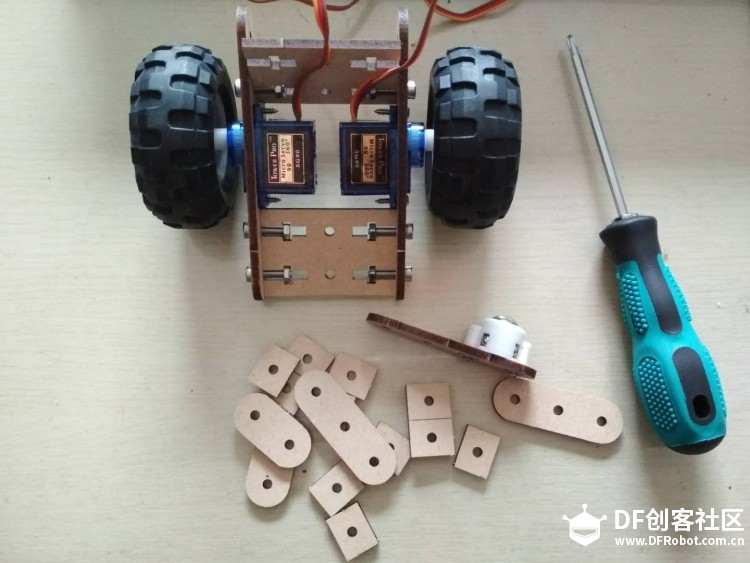 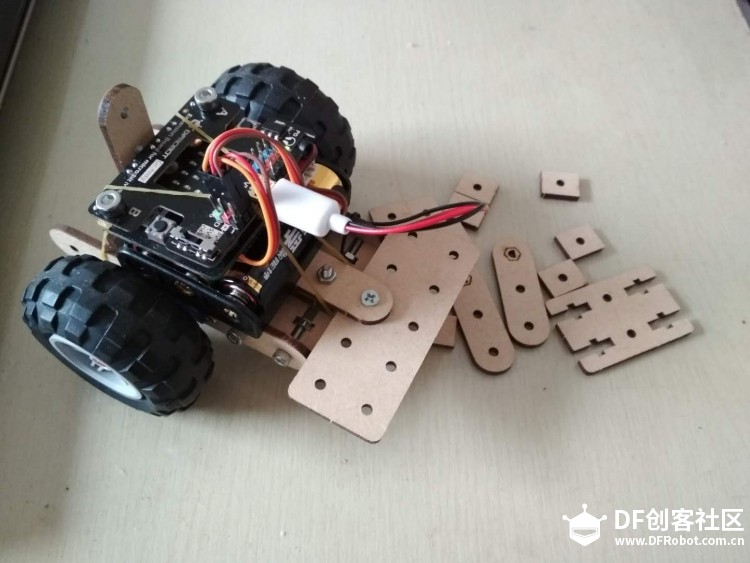  好的,过程见上图。 自由发挥。 电池上有小孔,可以固定在Laserblock上,扩展板和bit用橡皮圈吊在车体上好了。 四、测试视频 就这样吧,后面可以有别的玩法了。  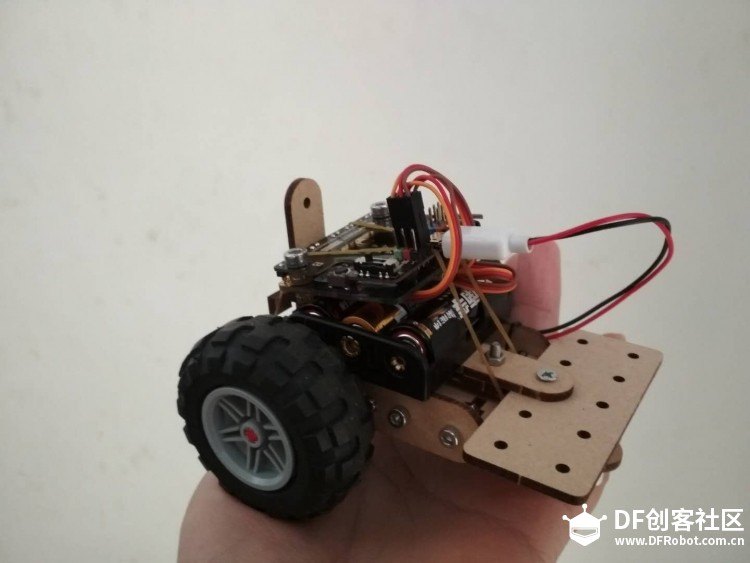 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









