|
22703| 1
|
[入门教程] 玩转micro:bit-用BXY控制小舵机、360舵机和带驱动N20电机 |

|
本帖最后由 粒子 于 2022-1-5 17:26 编辑 今天分享的是BXY的一个小功能--Servo(伺服机构),您用它可以做出好多好玩的小作品来,可以是六足虫,可小车或者其它有创意的好玩的东西。 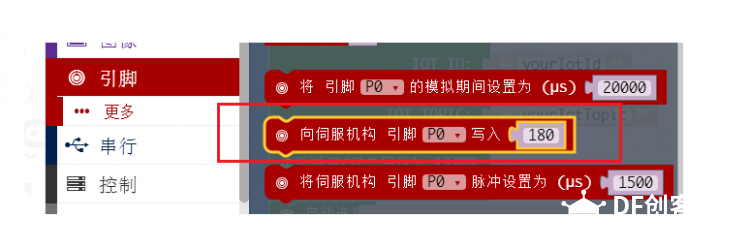 在makecode中,就是设置某引脚伺服机构的角度。 专题分享Servo,是因为我在前面的学习中走了弯路,在写舵机程序时用了啰嗦的方法。 而现在,我发现,DF其实给的有简单的方法。 它就是Servo(伺服机构)。 它可以用来控制9g小舵机,360度小舵机,带驱动N20电机。 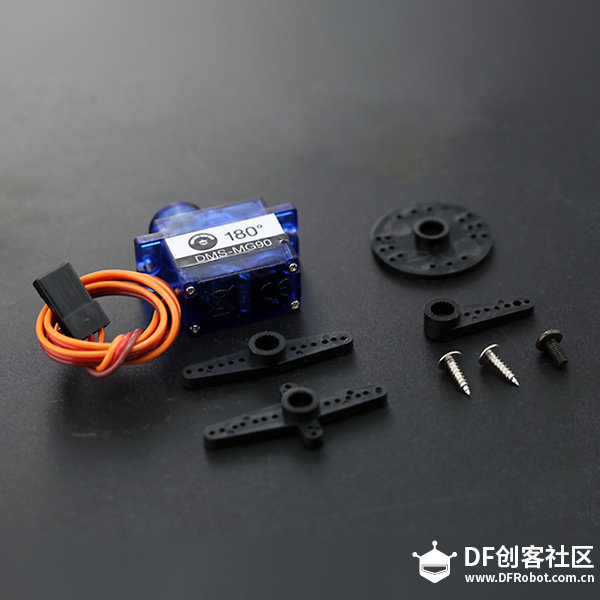 DMS-MG90 金属9g舵机 (1.8Kg)  SG90C 360度微型舵机 (1.6Kg) 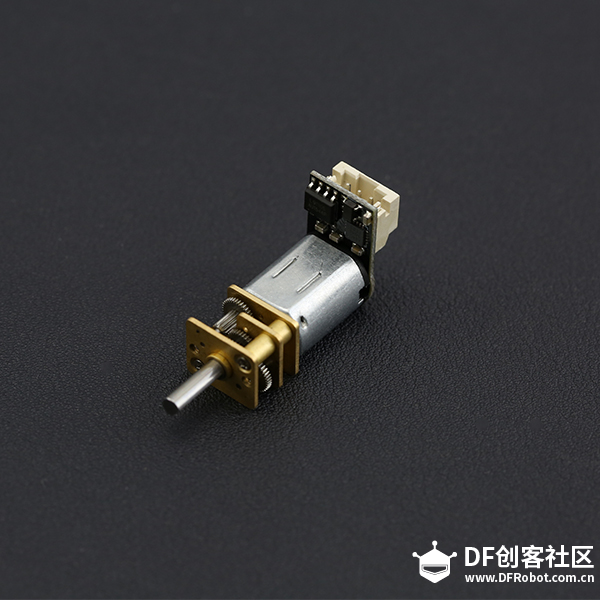 带驱动N20微型金属减速电机 - 30:1 带驱动N20微型金属减速电机 - 50:1 带驱动N20微型金属减速电机 75:1 1、下载安装BXY。 BXY是DF定制的一款运行于Windows平台的MicroPython编程IDE,界面简介,操作便利。为众多Microbit爱好者提供了一个简洁实用的平台。 QQ群:336213887 软件下载地址:https://gitee.com/dfrobot/iPy/raw/master/BXY.exe 2、程序界面:  3、先跑下例程:文件-示例-Servo.py 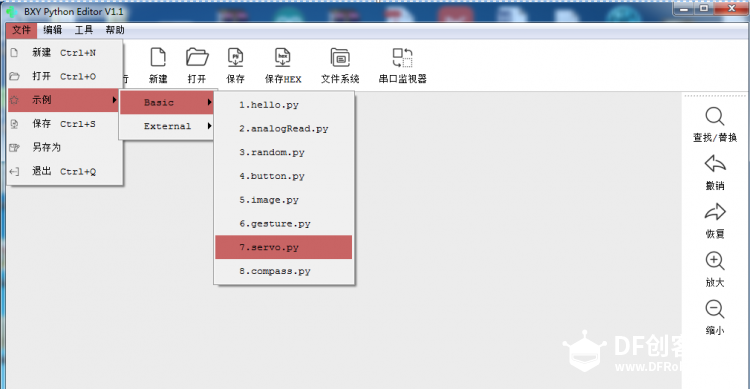 4、准备器材,接线,下载并运行(舵机需要较大电流,请给扩展板供电)。 例程将引脚定义在p0(3.3V),实际运用中建议用5V的接口,以获得更强劲的动力 [mw_shl_code=applescript,true]#https://bxy.dfrobot.com.cn/ from microbit import * import Servo sv=Servo(pin0) while True: sv.angle(0) sleep(1000) sv.angle(90) sleep(1000) sv.angle(180) sleep(1000) sv.angle(90) sleep(1000)[/mw_shl_code] 详解: 第1行和第2行:导入microbit包中的所有模块和Servo(伺服机构)模块。 第4行:在p0口创建一个伺服机构对象。 第6行到第13行:循环转动舵机到相应位置。 while True: 重复执行 sv.angle(0) 设置伺服机构角度为0 sleep(1000) 延时1000ms 9g小舵机大家常用,就不解释了啊,只建议在做项目时不要用极限值,防止抖动,例如用10-170度就挺好。  360度舵机是很好玩的。 SG90C是一款360度微型舵机。舵机内部采用塑料齿轮传动,轻便小巧。可用于各类应用及DIY制作中,诸如小车,船,风车等等。 360°舵机区别于一般普通舵机的点在于它取消了内部的硬件限位。只能够控制舵机的旋转方向和旋转速度,不能控制旋转角度。所以功能上更趋向于自带电机驱动的电机,可以控制正反转,停止。相对于普通直流电机,360度舵机不需要额外的电机驱动组件,即插即用,小巧方便,micro:bit的控制方式与普通舵机相同。舵机工作在4.8~6V电源上时,扭矩可到1.2~1.6Kg*cm。 90度(左右)时停止(具体度数要多测试几次),0度和180时正反两个方向转速最大。 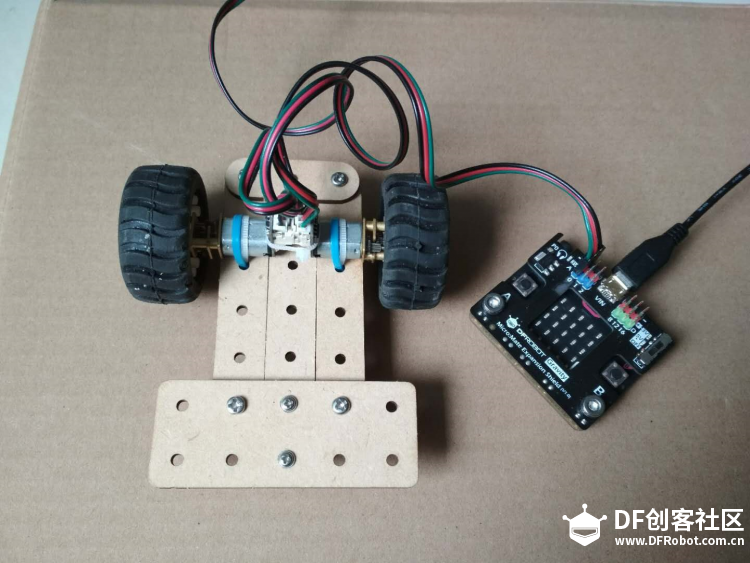 DFRobot推出带驱动微型金属减速电机有3个减速型号。 带驱动的金属减速电机相对更加实用,无需外部电机驱动即可轻松驾驭。仅需要一根控制管脚,即可以实现电机正/反转控制和速度控制要求。 电机采用了普适的360度伺服舵机控制方案,兼容性更广。在这基础上还做了针对性调整,增大了停止点脉宽;减少了待机功耗,无控制信号情况下电流小于1mA。 90度时停止,0度和180时正反两个方向转速最大。 好的,理解例程,后面就可以自己做出好玩的作品出来了。 由于时间有限,写的匆忙,难免有错误之处,敬请指正。 我们建有专门的QQ群和微信群,有什么问题,可以在群里交流。 QQ群号:484477101(中小学microbit课堂教学群)。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









