|
1803| 0
|
【行空板K10】Microbit wiki驱动舵机 |
|
1、硬件K10 具体功能这里略过,详细请看连接。 https://www.dfrobot.com.cn/goods-4035.html 舵机 工作扭矩:1.6KG/Cm转速:0.12-0.13秒/60°使用温度:-30°C~+60°C 死区设定:5微秒 转动角度:360°左右各180 使用电压:3-7.2V 舵机类型:数码舵机 Microbit wiki电机板 电源电压:3.5~5.5V DC 数字输出电压:0V / 3.3V 模拟输出电压:0~3.3V DC 标准重力接口 微:位接口:9 (P0 P1 P2 P8 P12 P13 P14 P15 P16) 伺服接口 x 8 电机接口:直流电机 x 4 / 步进电机 x 2 尺寸:63x58mm / 2.48x2.28in 2、实物   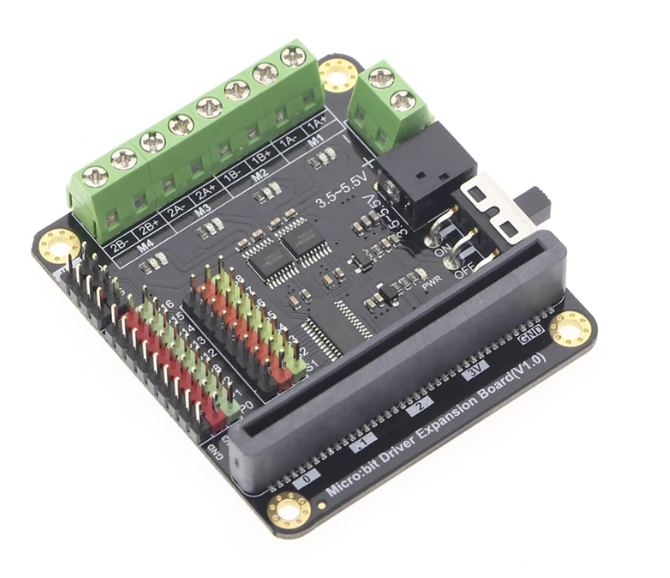 3、功能说明 系统架构设计 采用K10微控制器作为核心控制单元,通过I²C总线与NXP PCA9685PW芯片通信,实现16路舵机PWM信号输出。系统配置两个独立按键(KEY1/KEY2)作为触发输入,三色LED(红/绿/蓝)作为状态指示。 硬件连接方案 PCA9685模块:SCL接K10的I²C时钟引脚(如PTE0),SDA接数据引脚(如PTE1),VCC接3.3V电源 按键电路:KEY1接PTA12,KEY2接PTA13,配置为下降沿触发中断 LED指示:红灯接PTB0,绿灯接PTB1,蓝灯接PTB2,共阴极接地 Mind图形化实现步骤 I²C初始化:在"通信"模块中配置I²C0,设置时钟频率400kHz PCA9685配置: 使用"I²C写入"模块发送0x00(MODE1)寄存器配置 设置PRESCALE值为0x7D(对应50Hz PWM频率) 启用ALLCALL模式(0x20写入MODE1) 按键中断处理: 创建两个中断服务程序(ISR) KEY1按下时:调用"I²C写入"发送舵机1控制指令(LED1_ON_L=0x06,LED1_ON_H=0x00,LED1_OFF_L=0x20,LED1_OFF_H=0x00) KEY2按下时:发送舵机2控制指令,同时点亮三色LED(PTB0/1/2置高) 舵机控制逻辑: 通过修改OFF寄存器值实现0°-180°角度控制 示例:90°中位对应脉冲宽度1500μs(寄存器值0x78) 状态指示设计 按键未触发时:LED熄灭 KEY1按下:红灯常亮,舵机1旋转至90° KEY2按下:绿灯+蓝灯交替闪烁(500ms周期),舵机2执行往复摆动 4、代码 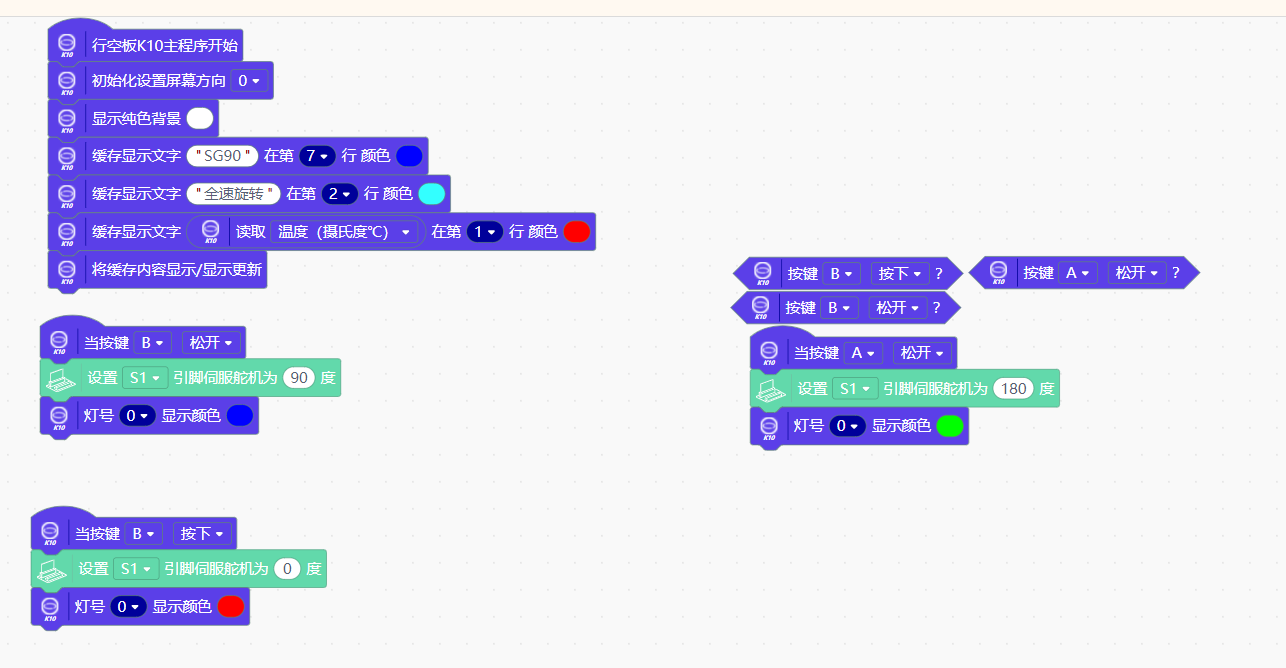  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






