|
624| 0
|
二哈识图 2 镜头套件及广角镜头试用报告 |

|
1. 试用背景 本人长期关注并使用 DFRobot 相关产品。本次有幸获得二哈识图 2 镜头套件的试用机会。收到产品后,对其包装、配件完整性、镜头安装流程、WebRTC 图传效果以及初次使用体验进行了测试和记录。 本报告基于实际开箱、安装与初步图像测试过程,重点评估产品的易用性、安装可靠性、图像表现以及可改进之处。 2. 产品包装与配件 本次收到的镜头套件采用顺丰快递寄送,外包装保护良好。内部使用无色透明 ESD PV 防静电塑料盒进行收纳,整体质感较好,能够有效保护镜头及相关敏感部件。 包装内主要包含以下部件: 1) 手动可调焦镜头 2) 显微镜头 3) 无畸变广角镜头 4) CMOS 底座模块 5) WiFi 模块 其中,无畸变广角镜头变已预先安装在 CMOS 底座上,方便用户快速开始测试。如图1、2。  图1  图2 3. 试用环境与工具 本次试用所使用的软硬件环境如下: 项目 内容 电脑系统 Windows 10 / Windows 11 主控设备 二哈识图 2 工具 十字螺丝刀、一字螺丝刀 连接方式 USB 数据线 网络环境 稳定 WiFi 网络 测试功能 实时图传、WebRTC 图传 4. 安装过程 4.1. CMOS 底座拆装 CMOS 底座是整个镜头系统的核心成像部件,所有镜头均需通过该模块与二哈识图 2 主机连接。由于 CMOS 芯片对灰尘、污染物和碎屑较为敏感,因此在更换或安装镜头时应尽量选择洁净环境。 安装过程中需要特别注意: 1) 避免 CMOS 长时间暴露在空气中; 2) 更换镜头时建议让 CMOS 芯片朝下; 3) 不要触碰 CMOS 感光区域; 4) 安装镜头时不要大力旋转,也不要快速旋转; 5) 操作过程中应尽量避免灰尘或碎屑落入芯片表面。 CMOS底座如图3。  图3 4.2. 拆除原摄像头 安装镜头套件前,需要先拆下二哈识图 2 自带摄像头模块。具体步骤如下: 1) 使用十字螺丝刀拧下原摄像头固定螺丝,如图4; 2) 拆下原摄像头后,可看到机身内部的白色摄像头连接器母座,如图5; 3) 将新的 CMOS 底座按照正确方向插入机身连接器,如图6; 4) 使用两颗螺丝将 CMOS 底座固定在机身上,如图7; 5) 最后再将广角镜头安装到 CMOS 底座上,如图8。 该流程整体较为直观,普通用户按照图示操作即可完成。  图4  图5 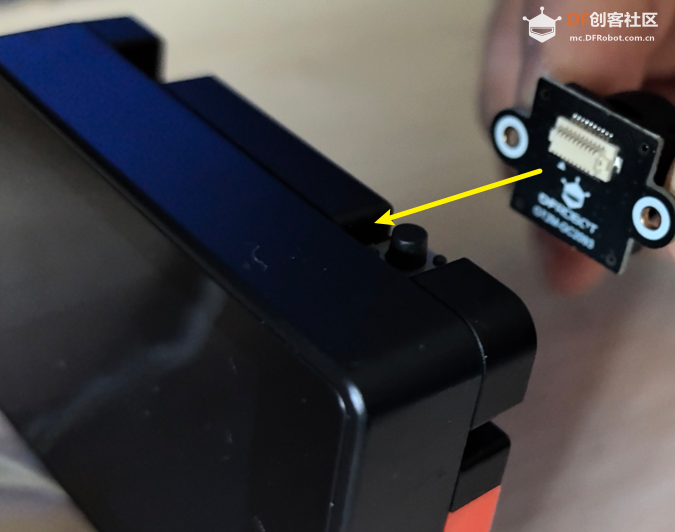 图6  图7  图8 5. 实际使用体验 镜头安装完成后,通过 USB 给二哈识图 2 上电。设备正常启动后,在触摸屏中选择“实时图传”,随后进入“WebRTC 图传”功能,如图9、10。  图9  图10 在屏幕左上角出现摄像机图标后,需要进一步选择具体应用才会真正开始图传。本次测试选择了“跌倒检测”应用,随后看到屏幕提示,如图11。  图11 在电脑浏览器中访问:http://192.168.88.1 该地址为二哈识图 2 通过 USB 建立的虚拟网卡 IP 地址。浏览器成功打开后,可以看到实时图像画面,如图12。  图12 从初步图传效果来看,画面清晰度较好,图像基本没有明显畸变,广角镜头的成像效果符合预期。对于二哈识图 2 的实时视觉识别、图传调试和后续 AI 应用开发来说,该镜头套件具有较高实用价值。 6. 发现的问题与改进建议 在实际安装过程中,发现两个较容易导致新手误操作的问题。 1) CMOS 底座缺少防呆设计 CMOS 底座 PCB 板外形较为对称,即使将底座旋转 180 度(如图13),也可以用螺丝顺利固定到机身上。但是此时 CMOS 底座的公座并没有与机身母座正确连接.  图13 这种情况下,设备可以正常开机,但摄像头无法正常工作,容易让初次使用的用户误判为硬件故障或软件设置问题。 2) 镜头与底座安装顺序容易影响操作 安装时建议先将 CMOS 底座固定到二哈识图 2 机身上,再安装镜头。如果先将镜头安装到 CMOS 底座,再整体固定到机身,由于镜头直径较大,螺丝刀无法保持垂直角度,只能倾斜操作(如图14),导致拧螺丝不方便,也可能增加滑丝或损伤结构的风险。  图14 建议: 官方说明书中可以进一步强调推荐安装顺序: 先安装 CMOS 底座,再安装镜头。 同时也可以在图文教程中明确说明错误安装顺序可能带来的不便。 7. 综合评价 整体来看,DFRobot 二哈识图 2 镜头套件包装精致,配件完整,镜头模块设计紧凑,安装完成后的图像效果清晰,广角镜头畸变控制较好。配合 WebRTC 图传功能,可以较方便地在电脑端查看实时图像,非常适合用于视觉识别、AI 教学、图像采集和项目开发。 本次试用中,产品主要优势如下: 1) 包装保护良好。镜头采用防静电透明盒收纳,便于保存和运输。 2) 配件较完整。提供多种镜头,可满足广角、手动调焦、显微观察等不同应用需求。 3) 图传体验较顺畅。通过 USB 虚拟网卡访问 WebRTC 图传页面,操作路径清晰。 4) 成像效果较好。初步测试中,画面清晰,基本无明显畸变。 5) 适合 AI 教学与项目拓展。与二哈识图 2 的视觉识别能力结合后,可用于跌倒检测、物体识别、图像观察等应用场景。 同时,产品仍有进一步优化空间,尤其是在安装防呆设计和安装步骤提示方面。若后续版本能够改进 CMOS 底座结构,并在说明书中强化安装方向与安装顺序提示,将显著提升新手用户的上手体验。 [size=14.6667px] 8. 结论 DFRobot 二哈识图 2 镜头套件是一套实用性较强的视觉扩展配件。其安装流程整体不复杂,图像质量表现良好,能够有效扩展二哈识图 2 在视觉识别和图像采集方面的应用能力。 [size=14.6667px] 对于创客教育、人工智能入门教学、机器人视觉项目以及图像识别实验来说,该套件具有较高的使用价值。建议官方在后续版本中进一步加强结构防呆设计,并完善安装提示,以提升产品的可靠性和用户友好度。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






