|
239| 0
|
C4002 毫米波传感器调试工具 |
|
C4002 毫米波传感器调试工具 安装与使用指南 适用于 DFRobotSEN0691 C4002 毫米波雷达模块 PC + 手机端 Web 调试工具 DFRobotSEN0691 C4002 是一款 60GHz 毫米波传感器模块,能够同时检测运动目标和静态存在目标,探测距离最长可达11 米。与传统的红外或超声波传感器相比,它具有探测范围大、不受温度/光照影响、能区分运动和存在等显著优势。 然而,C4002 的参数设置相对复杂。它有 15 个或 25 个距离门(由分辨率模式决定),每个门可以独立配置运动检测、存在检测以及灵敏度阈值。此外还有上报周期、检测范围、锁定时间、光照阈值等众多参数。要针对不同场景充分调整参数,才能发挥出理想的效果。 本项目正是为此而生——一个基于 Web 的 C4002 调试工具。你只需要将雷达模块通过串口转 USB 模块连接到电脑,然后运行本工具,即可在浏览器中查看实时数据、调整各项参数。 主要特点: · 同时支持 PC 和移动端浏览器,手机端可自动适配 · 实时显示目标状态、距离、速度、能量、光照等数据 · 可视化距离条,直观展示目标位置 · 所有参数均可在线调整,即时生效 · 完整的操作日志和原始帧显示,便于调试 · 跨平台,仅需 Python 环境 二、工作原理简述2.1 毫米波测距原理C4002 采用 60GHz 调频连续波(FMCW)技术。模块发射频率随时间线性变化的毫米波信号,并接收目标反射的回波。通过对比发射信号与回波信号的频率差,可以计算出目标的距离。同时利用多普勒效应,可以检测目标的运动速度和方向。 2.2 距离门(Distance Gate)距离门是 C4002 的核心概念。模块将整个探测范围划分为多个连续的"门"(Gate),每个门对应一段距离区间,可以独立配置运动检测和存在检测的启用/禁用状态。 距离门的划分取决于分辨率模式: · 80cm 模式:0~12 米范围划分为 15 个距离门,每个门宽约 80cm · 20cm 模式:0~5 米范围划分为 25 个距离门,每个门宽约 20cm 2.3 检测类型C4002 有两种检测模式,可以同时工作: · 运动检测(Motion):检测移动中的目标,输出距离、速度和方向 · 存在检测(Presence):检测静止的人体存在,输出距离和能量值 目标状态由以下值表示:0=无目标,1=存在(静态人体),2=运动(移动目标),3=存在+运动(同时检测到两种),4=运动或无目标,5=存在或无目标。 三、硬件准备3.1 所需硬件· DFRobot SEN0691 C4002 毫米波传感器模块× 1 · 串口转 USB 模块(如 CP2102、CH340、FT232)× 1 · 杜邦线若干(母对母) · 5V USB 电源适配器(或通过 USB 口供电) 3.2 接线方式C4002 模块有 4 个引脚,按以下方式连接到串口模块:
注意:TX 接 RX、RX 接 TX,即交叉连接。 四、安装 Python 环境本工具使用 Python 编写,需要先安装 Python 运行环境。推荐使用Python 3.9 及以上版本。 4.1 下载安装 Python访问https://www.python.org/downloads/ 下载 Python 3.9+ · 运行安装程序,务必勾选底部 "Add Pythonto PATH" · 安装完成后,打开命令提示符(CMD)输入以下命令验证: python --version 如果正确显示版本号,说明安装成功。 4.2 安装依赖库下载本项目后,进入项目文件夹,执行: pip install -rrequirements.txt 或者手动安装: pip installfastapi uvicorn pyserial 五、下载与运行5.1 下载项目从附件下载项目压缩包,解压到任意文件夹 5.2 启动服务打开命令提示符,进入项目文件夹,执行: cdC4002_Debug_Tool python web_server.py 出现以下输出说明启动成功: 启动Web服务... 5.3 连接雷达本地访问: http://localhost:8000 局域网访问: http://192.168.x.x:8000 将C4002 通过串口转 USB 模块连接到电脑。 打开浏览器,访问 http://localhost:8000 在页面顶部的"串口连接"区域: · 从下拉框选择正确的串口号(Windows 下通常为 COM3、COM4等) · 波特率保持默认 115200 · 点击"连接"按钮 连接成功后,状态显示变为"已连接",所有设置项变为可用状态。  六、功能详解6.1 操作标签页 六、功能详解6.1 操作标签页页面顶部有四个标签页:操作、数据、可视化、日志。"操作"标签页是主界面,包含串口连接、设备操作、设备设置、距离门设置等区域。 6.2 数据标签页 — 实时状态切换到"数据"标签页,可以看到雷达探测到的实时数据卡片: 
在"可视化"标签页中,你可以看到: 距离位置条:一条从 0m 到 10m 的横向距离条,存在目标显示为蓝色圆点,运动目标显示为红色圆点,位置实时更新。 目标卡片:分别显示存在目标和运动目标的详细数据。 距离门历史:以方块形式显示每个距离门的最近触发状态。蓝色方块表示该门有存在触发,红色方块表示有运动触发,灰色表示无触发。  6.4 分辨率模式 6.4 分辨率模式分辨率模式决定了距离门的数量和每个门的宽度。切换分辨率后,距离门配置和阈值网格会自动重建,阈值缓存会被清空并重新读取。 · 80cm 模式(默认):15 个距离门,每个门 80cm,总覆盖0~12m · 20cm 模式:25 个距离门,每个门 20cm,总覆盖0~5m 应用场景:如果主要检测近距离精确位置(例如 3 米以内),选择 20cm 模式可以获得更精细的分辨率;如果需要覆盖较远距离(例如走廊、大厅),选择 80cm 模式。 6.5 距离门配置每个距离门可以独立设置为四种状态: · 禁用:该门不参与任何检测 · 运动:仅启用运动检测 · 存在:仅启用存在检测 · 运动存在:同时启用运动和存在检测 配置完成后点击"应用距离门配置"按钮生效。注意:距离门配置是只写的,模块不会返回当前配置,请自行记录设置状态。 应用场景:例如只关心 3~5 米的运动目标,可以将其他门设为禁用,将对应门设为"运动",减少误报。 6.6 阈值与灵敏度灵敏度阈值组:提供四个预设档位,一键切换运动或存在的检测灵敏度。 · 低灵敏度(0):适用于高噪声环境,减少误报 · 中灵敏度(1):默认推荐,平衡检测率和误报率 · 高灵敏度(2):适用于微弱信号检测,提升检测距离 · 自定义(3):手动逐门设置阈值 距离门阈值:当选择"自定义"灵敏度时,可以手动为每个门设置 0-99 的阈值。阈值越低越灵敏。未手动设置的门(#15-24)会保持随机值,这是模块的已知行为。 设置阈值后点击"应用距离门阈值"按钮。运动门阈值和存在门阈值需要分别设置。  6.7 Out 模式(输出引脚模式) 6.7 Out 模式(输出引脚模式)C4002 的 OUT 引脚(硬件 Pin 2)可以根据检测结果输出高/低电平,用于直接驱动继电器、蜂鸣器等外部设备。有三种触发模式: · 运动触发:检测到运动时输出高电平 · 存在触发:检测到静态人体时输出高电平 · 运动或存在触发:检测到任何一种时输出高电平 6.8 上报周期设置雷达模块向上位机发送数据的频率。范围 1-255 × 0.1s(即 0.1s ~ 25.5s),默认 10(即 1.0s)。 如果需要在移动端远程观察实时数据,建议设置为 0.5-1 秒,既能看到流畅的更新,又不会因网络延迟导致体验不佳。 6.9 检测范围设置最近检测距离和最远检测距离,范围 0-1100cm。缩小检测范围可以减少非关注区域的干扰。 注意:最近距离必须小于最远距离。检测范围是全局限制,与距离门配置配合使用效果最佳。例如将检测范围设为 0-300cm,再将 300cm 以外的门禁用,双重保障。 6.10 光照阈值设置光照触发条件,范围 0-50 lux。当设置为 0 时(默认),光照不影响检测。当设置为非 0 值时,只在环境光照低于设定值时触发检测。 应用场景:安装在走廊的灯光控制系统中,设置光照阈值为 10 lux,只在夜间(环境光低于 10 lux)时有人经过才开灯,白天不触发。 6.11 目标消失延迟当目标离开检测区域后,延迟多长时间才判定为"无人"。范围0-65535 秒。 应用场景:在卫生间或会议室中,人员短暂离开,设置 30-60 秒的消失延迟,避免灯频繁开关。 6.12 锁定时间当状态从"有人"切换到"无人"时,传感器会进入一段锁定时间,期间不进行检测。范围 0.2-10 秒,精度 0.1 秒。 应用场景:在走廊场景中,人快速通过时,设置 1-2 秒锁定时间,防止刚熄灭灯光又瞬间触发。 6.13 LED 指示灯C4002 模块上有两个指示灯: · 运行指示灯(绿色闪烁):模块正常运行时的状态指示 · 输出指示灯(蓝色):对应 OUT 引脚的输出状态 两者均可开启或关闭。 6.14 环境校准环境校准用于采集当前环境的底噪数据,使传感器更好地适应安装环境。校准流程如下: · 点击"开始环境校准"按钮 · 出现 10 秒倒计时,请在倒计时期间离开检测区域 · 倒计时结束后,模块开始 40 秒底噪采集 · 采集完成后,自动读取校准后的阈值数据 建议在安装完成后、正常使用前进行一次环境校准。校准期间确保检测区域内无人移动。 6.15 恢复出厂设置与重启恢复出厂设置:将模块所有参数重置为出厂默认值(检测范围 0-1100cm、分辨率 80cm、上报周期 1s、波特率 115200 等),然后自动重启。操作前会弹出二次确认对话框,防止误触。 重启模块:仅执行重启,保留所有当前配置。同样有二次确认。 两者的进度对话框会在检测到模块重启完成、恢复正常数据上报后自动关闭。 七、手机端使用这是本工具的一大亮点。在同一局域网下,用手机直接输入电脑 IP 地址即可访问。 · 确保手机和电脑连接到同一个 Wi-Fi 网络 · 启动服务后,命令行会显示类似 "局域网访问: http://192.168.x.x:8000" 的地址 · 在手机浏览器中输入该地址 · 手机界面会自动适配屏幕大小,布局和功能与 PC 端完全一致 这样当你远离电脑、在现场调整雷达安装位置或测试不同场景时,可以随时掏出手机观察实时数据、调整参数。 八、日志功能"日志"标签页记录了所有操作和通信数据,对调试非常有帮助。 · 自动刷新:默认开启,新日志会自动滚动到底部,可手动关闭 · 原始帧:开启后,每条日志会附带完整的十六进制原始帧数据 · 清空日志:一键清除所有日志内容 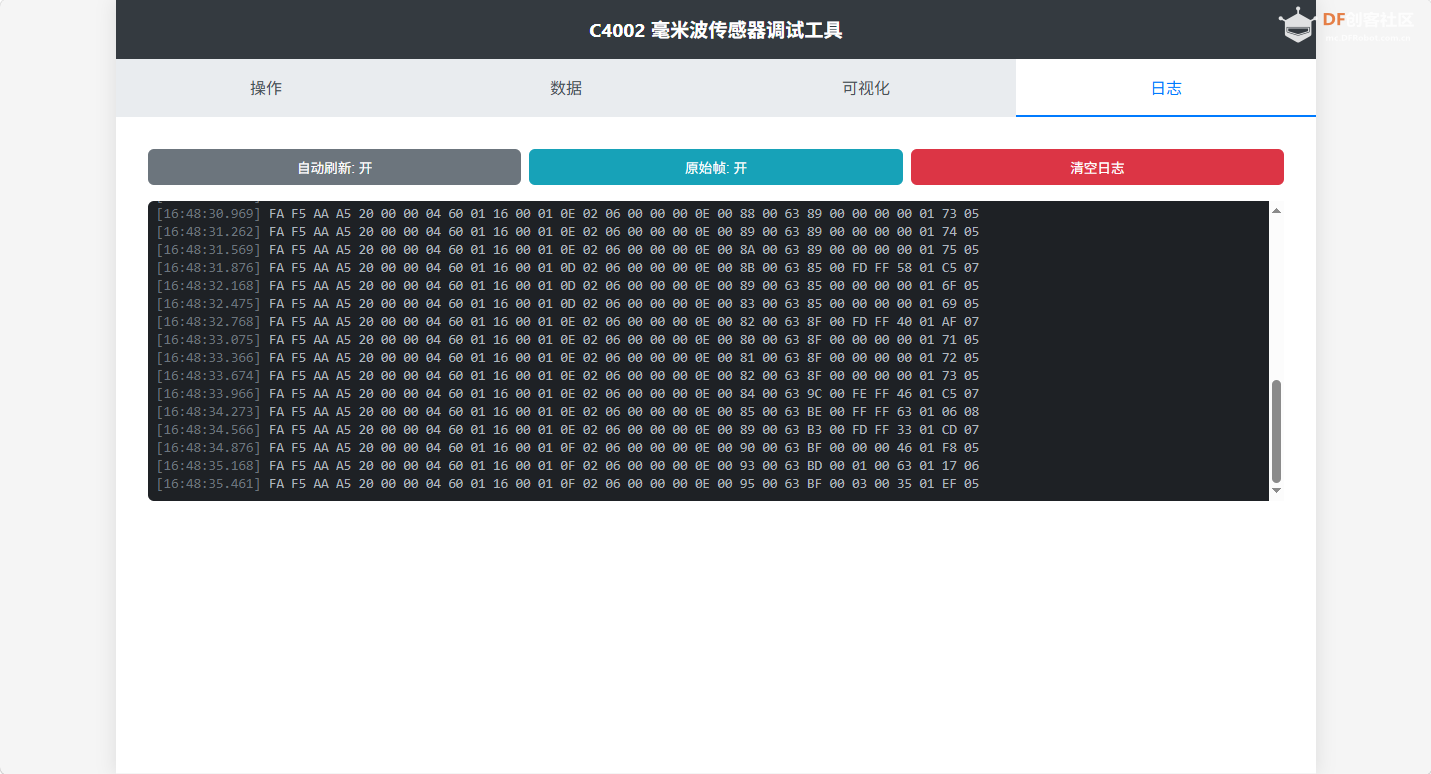 九、常见问题 九、常见问题Q: 连接失败,提示"串口被占用"? A: 关闭其他可能占用该串口的程序(如 ArduinoIDE、串口调试助手),重新连接。 Q: 连接成功但没有任何数据? A: 检查波特率是否匹配(默认 115200),检查 TX/RX 接线是否正确(交叉连接)。 Q: 数据更新很慢? A: 检查"上报周期"设置,默认为 1 秒。可以调小到 0.1 秒(1)以获得更快的更新。 Q: 手机打不开网页? A: 确认手机和电脑在同一个局域网,关闭电脑防火墙或添加8000 端口例外。 Q: 检测经常误报? A: 尝试以下操作:1) 执行环境校准 2) 调低灵敏度(选择"低灵敏度") 3) 禁用不关注的距离门4) 缩小检测范围。 Q: 设置了参数但模块没反应? A: 每个参数修改后需要点击对应的"应用"按钮才能生效。操作成功后会有模态框提示。 Q: 恢复出厂设置后参数不对? A: 恢复出厂设置后会执行重启,页面会自动等待模块重新就绪后重新读取所有设置。 十、附录10.1 文件清单以下为项目核心文件:
· 亮度检测不准确,固件bug。 · 恢复出厂设置只恢复部分,固件bug。 · 距离门阈值默认值随机,固件bug。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






