|
6845| 4
|
[项目] 多足机器人【改版:陆续登陆高端大气的多足机器人】 |
|
视频很是震撼人!!!26个自由度。。。。具体的看视频,有介绍。。。 T8 is a bio-inspired high resolution 3D printed robot that uses a total of 26 servo motors. It is powered by the Bigfoot™ Inverse Kinematics Engine. The Bigfoot™ Inverse Kinematics Engine handles all the complex math calculations necessary for controlling multi-legged walking robots. All computations are safely hidden from the user in the form of a black box. This means that the user only has to send short and simple commands to the robot (for example, instructing it to walk forward at a desired speed) and the engine will automatically take care of all the details, including inverse kinematics, leg trajectory planning, leg gait coordination, motor control, etc. This makes it quite easy even for absolute beginners to play with advanced robotics. Commands are sent and received via wireless XBee. Optionally, you can connect your own serial communication method with the provided Rx/Tx pins. You can choose between pre-programming your own sequences or directly controlling the robot in real time with the wireless Robugtix™ Controller. http://www.robugtix.com/ |
|
A-Pod is an ant inspired hexapod robot with a 2 DOF abdomen (tail), a 3 DOF head with large mandibles. 6 legs with 3 DOF each. Total 25 servos. This video demonstrates improved walking ability. A-Pod are controlled using a custom made transmitter, XBee communication, Basic Micro BAP28 mcu, SSC32 servo controller, powered by one single 2S LiPo 5000 mAh battery. |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶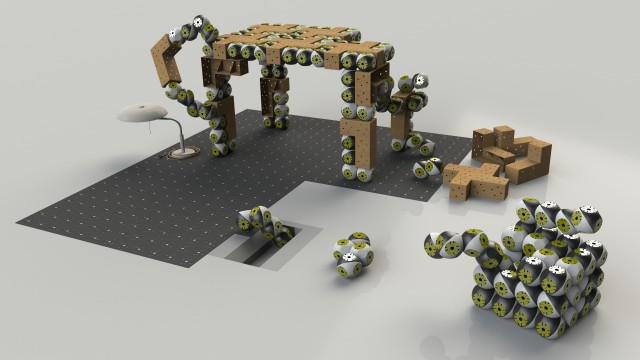


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖






