|
14574| 0
|
[项目] 【转】Arduino 控制舵机 |
|
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0度到180 度。具体的旋转范围根据舵机型号有所不同。 大多数规格的舵机都会引出三根线,常见的是红棕橙三个颜色,也有红白黑三色的。红色为5v电源线,黑色或棕色线为接地线,橙色或白色线为信号线。  用Arduino控制舵机的方法有两种,一种是通过Arduino 的普通数字传感器接口产生占空比不同的方波,模拟产生PWM信号进行舵机定位,第二种是直接利用Arduino 自带的Servo函数进行舵机的控制,这种控制方法的优点在于程序编写,缺点是只能控制2 路舵机,因为Arduino 自带函数只能利用数字9、10接口。Arduino 的驱动能力有限,所以当需要控制1个以上的舵机时需要外接电源。 以下实验仅需要一扎跳线和一个舵机。 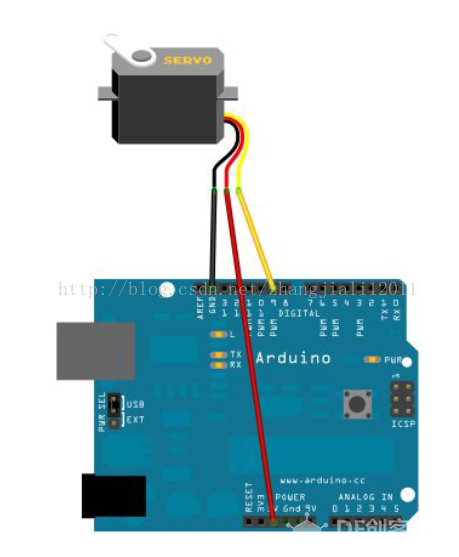 [mw_shl_code=applescript,true]//UART send 1~9==>20~180 degree int servopin=9;//设置舵机驱动脚到数字口9 int myangle;//定义角度变量 int pulsewidth;//定义脉宽变量 int val; void servopulse(int servopin,int myangle)/*定义一个脉冲函数,用来模拟方式产生PWM值*/ { pulsewidth=(myangle*11)+500;//将角度转化为500-2480 的脉宽值 digitalWrite(servopin,HIGH);//将舵机接口电平置高 delayMicroseconds(pulsewidth);//延时脉宽值的微秒数 digitalWrite(servopin,LOW);//将舵机接口电平置低 delay(20-pulsewidth/1000);//延时周期内剩余时间 } void setup() { pinMode(servopin,OUTPUT);//设定舵机接口为输出接口 Serial.begin(9600);//设置波特率为9600 Serial.println("servo=o_seral_simple ready" ) ; } void loop() { val=Serial.read();//读取串口收到的数据 if(val>'0'&&val<='9')//判断收到数据值是否符合范围 { val=val-'0';//将ASCII码转换成数值,例'9'-'0'=0x39-0x30=9 val=val*(180/9);//将数字转化为角度,例9*(180/9)=180 Serial.print("moving servo to "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //产生PWM个数,等效延时以保证能转到响应角度 { servopulse(servopin,val);//模拟产生PWM } } } [/mw_shl_code] 以上代码的效果为:输入数字1,舵机角度为20度,输入2,舵机为40度,以此类推,直到输入9,舵机输出180为止。 现将其进行修改 [mw_shl_code=applescript,true]int servopin=9;//设置舵机驱动脚到数字口9 int myangle;//定义角度变量 int pulsewidth;//定义脉宽变量 int val; void servopulse(int servopin,int myangle)/*定义一个脉冲函数,用来模拟方式产生PWM值*/ { pulsewidth=(myangle*11)+500;//将角度转化为500-2480 的脉宽值 digitalWrite(servopin,HIGH);//将舵机接口电平置高 delayMicroseconds(pulsewidth);//延时脉宽值的微秒数 digitalWrite(servopin,LOW);//将舵机接口电平置低 delay(20-pulsewidth/1000);//延时周期内剩余时间 } void setup() { pinMode(servopin,OUTPUT);//设定舵机接口为输出接口 Serial.begin(9600);//设置波特率为9600 } void loop() { val=Serial.read();//读取串口收到的数据 if(val>='0'&&val<='1') //判断收到数据值是否符合范围 { val=val-'0'; //将ASCII码转换成数值,例'9'-'0'=0x39-0x30 val=val+1; val=val*10*val*val;//将数字转化为角度 Serial.print("moving servo to "); Serial.print(val,DEC); Serial.println(); for(int i=0;i<=50;i++) //给予舵机足够的时间让它转到指定角度 { servopulse(servopin,val);//引用脉冲函数 } } } [/mw_shl_code] 此时如果将舵机装于机械爪上,则效果为,输入1爪子张开,输入0爪子闭合。 |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






