|
之前的博客中,我们使用rviz进行了TurtleBot的仿真,而且使用urdf文件建立了自己的机器人smartcar,本篇博客是将两者进行结合,使用smartcar机器人在rviz中进行仿真。
一、模型完善 之前我们使用的都是urdf文件格式的模型,在很多情况下,ROS对urdf文件的支持并不是很好,使用宏定义的.xacro文件兼容性更好,扩展性也更好。所以我们把之前的urdf文件重新整理编写成.xacro文件。 .xacro文件主要分为三部分: 1、机器人主体 [mw_shl_code=applescript,true]<?xml version="1.0"?>
<robot name="smartcar" xmlns:xacro="http://ros.org/wiki/xacro">
<property name="M_PI" value="3.14159"/>
<!-- Macro for SmartCar body. Including Gazebo extensions, but does not include Kinect -->
<include filename="$(find smartcar_description)/urdf/gazebo.urdf.xacro"/>
<property name="base_x" value="0.33" />
<property name="base_y" value="0.33" />
<xacro:macro name="smartcar_body">
<link name="base_link">
<inertial>
<origin xyz="0 0 0.055"/>
<mass value="1.0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<box size="0.25 .16 .05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.055"/>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0.055"/>
<geometry>
<box size="0.25 .16 .05" />
</geometry>
</collision>
</link>
<link name="left_front_wheel">
<inertial>
<origin xyz="0.08 0.08 0.025"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="right_front_wheel">
<inertial>
<origin xyz="0.08 -0.08 0.025"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_front_wheel"/>
<origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_back_wheel">
<inertial>
<origin xyz="-0.08 0.08 0.025"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_back_wheel"/>
<origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="right_back_wheel">
<inertial>
<origin xyz="-0.08 -0.08 0.025"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_back_wheel"/>
<origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="head">
<inertial>
<origin xyz="0.08 0 0.08"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<box size=".02 .03 .03"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<origin xyz="0.08 0 0.08"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link>
<joint name="tobox" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0.08 0 0.08"/>
</joint>
</xacro:macro>
</robot>[/mw_shl_code]
2、gazebo属性部分 [mw_shl_code=applescript,true]<?xml version="1.0"?>
<robot xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:xacro="http://ros.org/wiki/xacro"
name="smartcar_gazebo">
<!-- ASUS Xtion PRO camera for simulation -->
<!-- gazebo_ros_wge100 plugin is in kt2_gazebo_plugins package -->
<xacro:macro name="smartcar_sim">
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<gazebo reference="right_front_wheel">
<material>Gazebo/FlatBlack</material>
</gazebo>
<gazebo reference="right_back_wheel">
<material>Gazebo/FlatBlack</material>
</gazebo>
<gazebo reference="left_front_wheel">
<material>Gazebo/FlatBlack</material>
</gazebo>
<gazebo reference="left_back_wheel">
<material>Gazebo/FlatBlack</material>
</gazebo>
<gazebo reference="head">
<material>Gazebo/White</material>
</gazebo>
</xacro:macro>
</robot>[/mw_shl_code] 3、主文件 [mw_shl_code=applescript,true]<?xml version="1.0"?>
<robot name="smartcar"
xmlns:xi="http://www.w3.org/2001/XInclude"
xmlns:gazebo="http://playerstage.sourceforge.net/gazebo/xmlschema/#gz"
xmlns:model="http://playerstage.sourceforge.net/gazebo/xmlschema/#model"
xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor"
xmlns:body="http://playerstage.sourceforge.net/gazebo/xmlschema/#body"
xmlns:geom="http://playerstage.sourceforge.net/gazebo/xmlschema/#geom"
xmlns:joint="http://playerstage.sourceforge.net/gazebo/xmlschema/#joint"
xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller"
xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface"
xmlns:rendering="http://playerstage.sourceforge.net/gazebo/xmlschema/#rendering"
xmlns:renderable="http://playerstage.sourceforge.net/gazebo/xmlschema/#renderable"
xmlns:physics="http://playerstage.sourceforge.net/gazebo/xmlschema/#physics"
xmlns:xacro="http://ros.org/wiki/xacro">
<include filename="$(find smartcar_description)/urdf/smartcar_body.urdf.xacro" />
<!-- Body of SmartCar, with plates, standoffs and Create (including sim sensors) -->
<smartcar_body/>
<smartcar_sim/>
</robot>[/mw_shl_code]
二、lanuch文件 在launch文件中要启动节点和模拟器。 [mw_shl_code=applescript,true]<launch>
<param name="/use_sim_time" value="false" />
<!-- Load the URDF/Xacro model of our robot -->
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find smartcar_description)/urdf/smartcar.urdf.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg urdf_file)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="driver.py" output="screen">
<rosparam file="$(find smartcar_description)/config/smartcar_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- We need a static transforms for the wheels -->
<node pkg="tf" type="static_transform_publisher" name="odom_left_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /left_front_link 100" />
<node pkg="tf" type="static_transform_publisher" name="odom_right_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /right_front_link 100" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find smartcar_description)/urdf.vcg" />
</launch>[/mw_shl_code] 三、仿真测试 首先运行lanuch,既可以看到rviz中的机器人: [mw_shl_code=applescript,true]roslaunch smartcar_description smartcar_display.rviz.launch[/mw_shl_code] 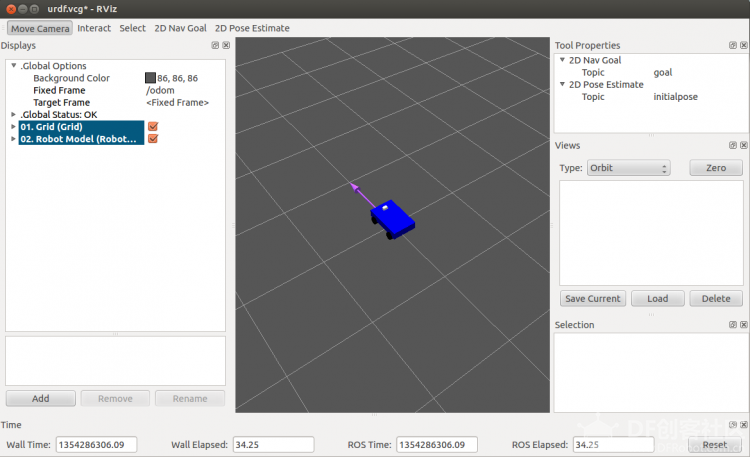
发布一条动作的消息。 [mw_shl_code=applescript,true]rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'[/mw_shl_code] 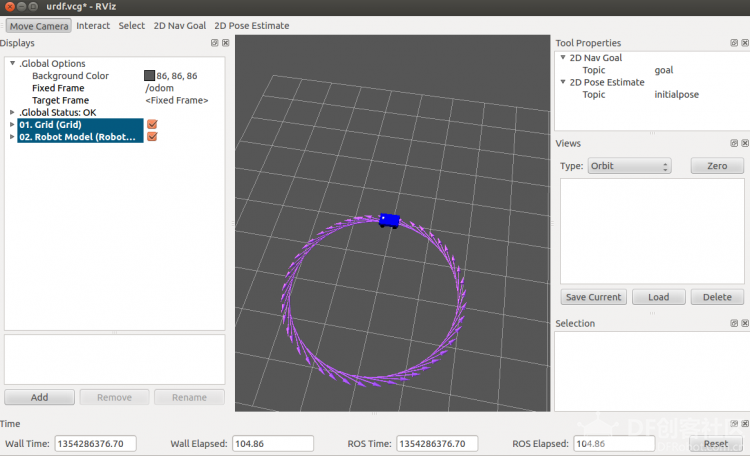
四、节点关系 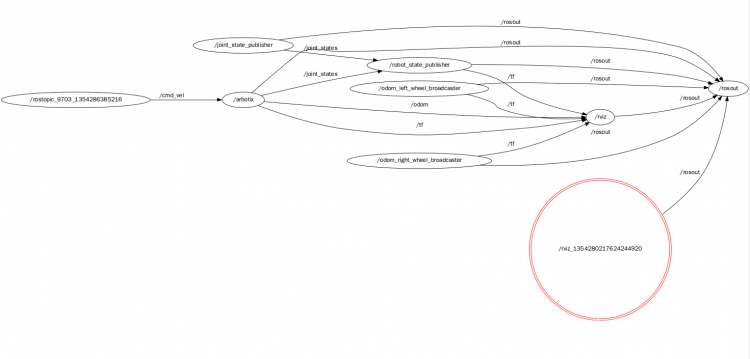
---------------------------------------------------------------- 欢迎大家转载我的文章。 转载请注明:转自古-月 http://blog.csdn.net/hcx25909 |  蘑菇老人
蘑菇老人



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






