|
5723| 0
|
机器人之旅:当Arduino遇上Android |
android手机的优势:
Android+Arduino示意图: 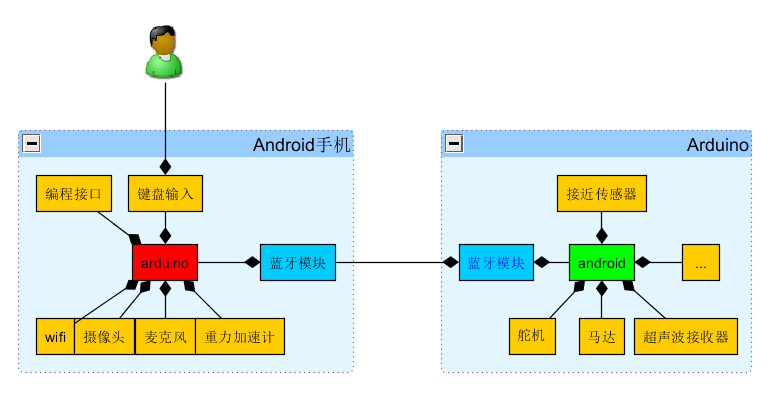 千里之行,始于足下。虽然很想现在就搞个四轴飞行器耍一把,还是先整个简单的机器人小车比较靠谱。android系统提供了蓝牙串口功能,并且支持python开发哦。在熟悉了arduino基本接口之后,就开始着手了。 前期准备开发软件 软件下载 http://arduino.cc/en/Main/Software,下载回来解压就能用了。 提供以下平台的支持: · Mac OS X · Windows平台 · Linux平台 所需的全套设备: arduino控制板 二轮机器人小车套件(包含车底板,电池盒,马达2个) 马达驱动板 蓝牙扩展接口板 BluetoothV3蓝牙串口模块(提供透明TTL串口通讯) 组装过程实在是有点简单,线路连接都没有操作错误的机会。 需要注意的是,传感器方面:马达驱动板占用了4个数字IO口 :4,5,6,7,分别用做两个马达的方向、转速。 而蓝牙模块就比较省事了,不需要任何coding,直接与串口连接了。使用时只要进行简单的蓝牙配对(蓝牙适配器pin码默认是1234)。附上核心代码: void loop(){ char val = Serial.read(); Serial.write(val); if (-1 != val) { if ('W' == val) go(); else if ('A' ==val) left(); else if ('D' == val) right(); else if ('S' == val) back(); else stop(); delay(500); } else { //stop(); delay(500); }}Android手机: 为了图省事,网上直接找了个蓝牙串口通信助手,用来与arduino进行基于蓝牙的串口操作。 一切搞定后,打开蓝牙串口通信助手,连接到arduino,接下来输入口令就行了。WASD空格,很标准的操作:p 这张是搞到一半时的照片:  PS: 组件列表: arduino 控制板: 淘宝上一大堆,挑便宜的arduino就阔以了。 二轮机器人小车套件: 马达驱动板:采用的是L293 1A 双路电机驱动板。用来控制两个马达输入输出。 扩展接口板:挑选了Arduino Xbee传感器扩展板V5 含RS485无线数传蓝牙接口 BluetoothV3蓝牙串口模块: 与Arduino Xbee扩展版共同工作。 |
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






