|
12714| 7
|
[常见问题] flymaple 前期的使用 总结 |
|
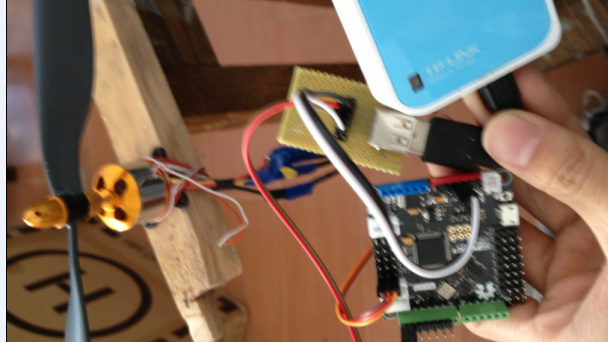
经过这么多天 才发现 是驱动的 问题 所以来提醒大家 这么多天 感谢 bobo 的帮助 这是bobo 的 提示 win驱动安装 1.dfu驱动:按下reset键放开后蓝色指示灯会先快速闪烁然后慢闪烁,在快闪时按下BUT键(板子右上方),在慢闪烁时放开此键,这事蓝色指示灯会一直闪烁保持在bootloader等待下载程序,这时系统会提示安装驱动,选择手工选择驱动位置,选择maple IDE目录下driver/dfu目录,系统会自动安装驱动 2.usb 虚拟串口驱动:打开maple IDE,点击file》example随便选择一个例程下载到板中,按下reset键运行程序系统会自动提示要求安装虚拟串口驱动程序,选择手工选择驱动位置,选择maple IDE目录下driver/serial目录,系统会自动安装驱动 这个 是 软件 选择 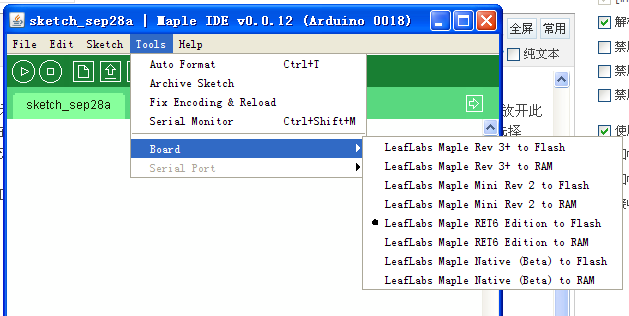 上传程序的小技巧: 按下reset键当蓝色指示灯快速闪烁时,立即按下BUT键,在慢闪烁时放开此键,这时蓝色指示灯会一直闪烁保持在bootloader等待下载程序,这时点击IDE中的上传程序键即可开始编译和下载,不需要选择串口。如有错误和提示信息会显示在下方的状态窗口。 还有 系统 尽量使用 xp 这样 下载就应该没问题了 还有就是 你 测试 电调 的问题 我用的是 中特威 30A 的 这个 是 bobo 给我改的 不同 电调 定义不一样 这得根据说明来写 motorInit(); //电机控制初始化 ///////////////电调初始化设置行程,此时脉冲发出和电调电源一定要同时发生,设置最高行程/////////////////// MotorData[0] = 999; //首先将PWM设置为最高,设置电调最高行程数字 MotorData[1] = 999; MotorData[2] = 999; MotorData[3] = 999; MotorData[4] = 999; MotorData[5] = 999; motorCcontrol(); //计算各个电机控制量之差,将这个值用于定时器产生中断改变相应电机脉冲高电平时间 delay(3000); //延迟至少3秒等待电调记住,需要根据实际的电调手册更改 MotorData[0] = 10; //将PWM设置为10,设置电调最低行程数字,解锁的时候只需要等于或者低于10就可以解锁 MotorData[1] = 10; MotorData[2] = 10; MotorData[3] = 10; MotorData[4] = 10; MotorData[5] = 10; motorCcontrol(); //计算各个电机控制量之差,将这个值用于定时器产生中断改变相应电机脉冲高电平时间 delay(3000); //延迟至少3秒等待电调记住,需要根据实际的电调手册更改 //////////////////////////解锁电调,发出低于设置的最小行程就可以这里小于///////////////////////////// MotorData[0] = 8; //将PWM设置为10,设置电调最低行程数字,解锁的时候只需要等于或者低于10就可以解锁 MotorData[1] = 8; MotorData[2] = 8; MotorData[3] = 8; MotorData[4] = 8; MotorData[5] = 8; motorCcontrol(); //计算各个电机控制量之差,将这个值用于定时器产生中断改变相应电机脉冲高电平时间 delay(2000); //延迟至少2秒等待电调记住,需要根据实际的电调手册更改 这个 是 初始化电调 放在 void 里面就可以 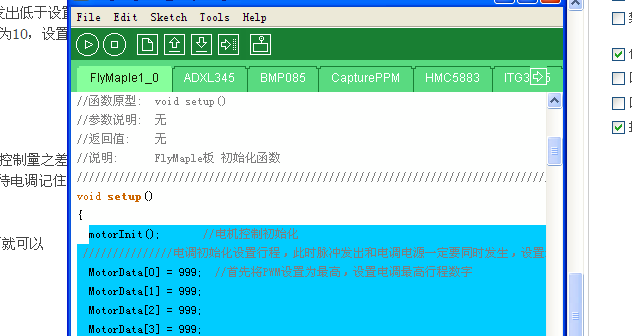 我现在 也 只进行到 这里 希望 能给 以后购买 flymaple 的 人带来方便 |
|
本帖最后由 夏斌 于 2012-12-26 19:54 编辑 :lol这个贴子对我帮助很大!收到 Flymaple 板子当晚,我就遇到下载程序不成功的事,不认虚拟串口。立即找客服换货:L,半夜看到这个贴子: “按下reset键当蓝色指示灯快速闪烁时,立即按下BUT键,在慢闪烁时放开此键,这时蓝色指示灯会一直闪烁保持在bootloader等待下载程序,这时点击IDE中的上传程序键即可开始编译和下载,不需要选择串口。如有错误和提示信息会显示在下方的状态窗口。” 立刻一顿乱按,问题解决了:lol 这几天研究了一下测试程序,自己试着写了点程序,小有收获,回头发出来,共同探讨下。:$ (顺便问下版主,发编程调试的贴子,在哪个版块发比较好啊?FlyMaple编程的。新人傻问) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 在这里 可以找到 你需要 的语句 和 引脚的定义 你可以 用外部设施控制它比如 用他的 tx rx 使用 ttl 控制 我 现在 要用wr 703 控制 但是不知道能否成功
在这里 可以找到 你需要 的语句 和 引脚的定义 你可以 用外部设施控制它比如 用他的 tx rx 使用 ttl 控制 我 现在 要用wr 703 控制 但是不知道能否成功