|
12312| 1
|
[入门教程] 第五课 micro:bit体感小车造一辆 |
本帖最后由 sunkf 于 2018-8-25 23:48 编辑  经过一周的学习,我们又学会如何去使用 “电子罗盘”去获取当前罗盘方位角,编写使用电子罗盘的程序下载时都必须进行校准。  方法是绕一圈让LED点阵点亮最外圈,并显示笑脸就可以了,如下图(图片来源于网络)。   【任务一】以小组为单位,动手试着完成“一个可用指南针” 参考 指南针 - Microsoft MakeCode 根据小组完成情况进行评比。 【拓展一】使用字符“N,E,S,W”显示还不够直观、明了,指南针要是有指针,并且能够永远指向北方会更加灵动、有趣,改进一下你们的程序吧! 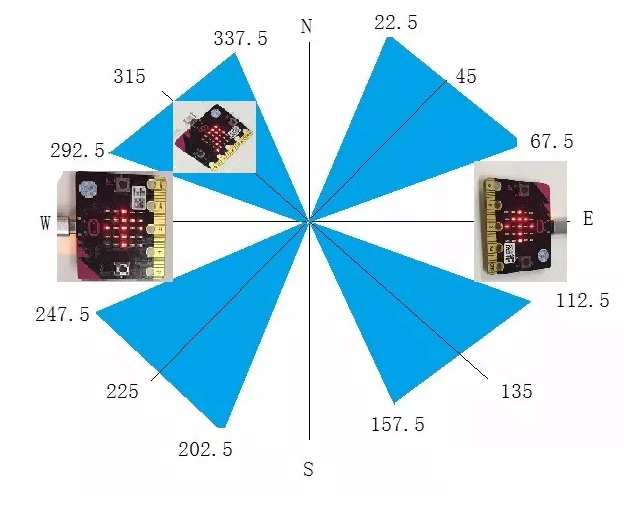 参照上图,思考一下如何去完善“指南针”项目,参考 用micro:bit做一个可以用的指南针 (图片于参考案例均来自于石斧创客) 【本课挑战】 【任务二】 经过刚刚的学习,我们让microbit更加自如的去实现我们的想法,那结合以前学过micro:bit的“无线”通讯功能,我们可以一起来造一辆遥控小车,开始动手吧。 (1)进行控制端的程序编写  (2)执行端程序编写 首先,加载Robotbit扩展包 https://github.com/KittenBot/pxt-robotbit 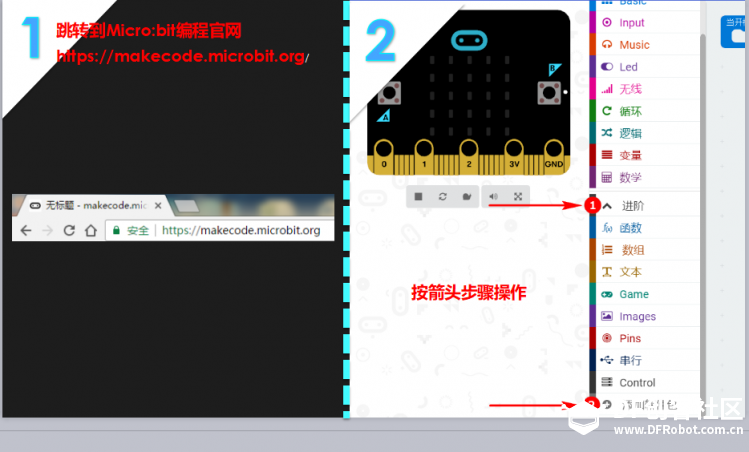 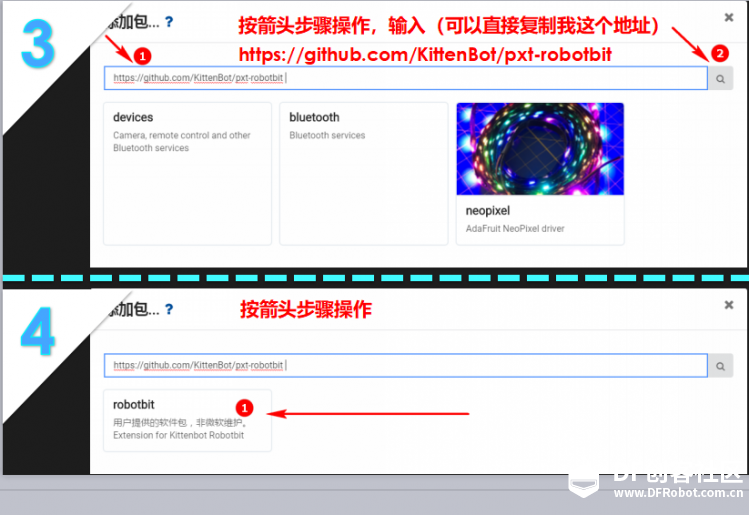 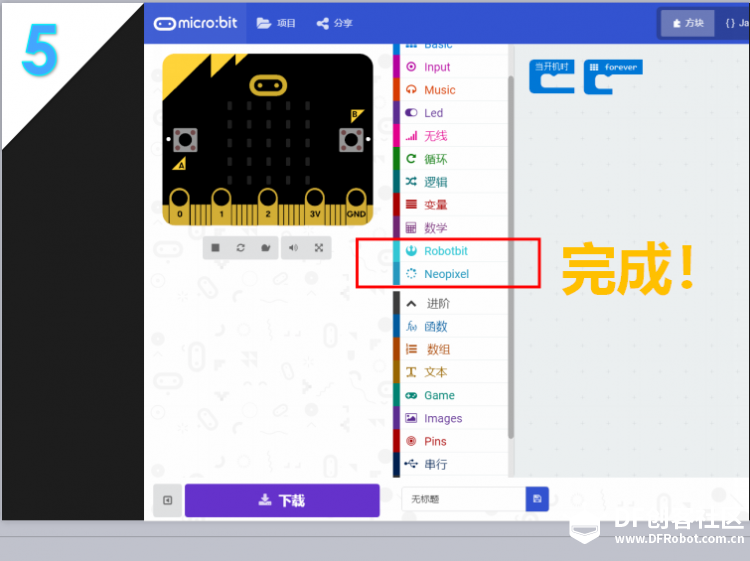 (3)参考 microbit的红汽车历险记 03 车随心动、遥控车、[基础教程]Micro:bit 28 体感遥控小车 (来源于朱老师、狄老师们以及官网项目) (4)动手造 【拓展二】加入体感控制,来一场酷炫的micro:bit格斗小车吧。 (1) 参考狄老师的 我们都是“钢铁侠” ——刍议基于micro:bit的校园机器人格斗 (2)动手造 【课后反思】 课后更新…… |
 ARD DAY
ARD DAY



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







