|
7697| 3
|
[入门教程] 小MU|麦小昆:球球走,我也走 |
本帖最后由 rzyzzxw 于 2019-10-29 08:19 编辑  嗨,大家好,我就是人见人爱,花见花开,学习好,身体棒的麦小昆。 我更是新时代的麦小昆,添加了小MU新装备,更具有了超人的能量。 https://www.dfrobot.com.cn/goods-1802.html   器材准备: 人见人爱小麦昆 1https://www.dfrobot.com.cn/goods-1802.html 神奇慧眼小MU 1https://www.dfrobot.com.cn/goods-2003.html MU支架 1 我是一个有追求的麦小昆,现在就追球给你看哦。 MIND+准备  编程灵感:开始我用的是球体检测识别,效果不理想。后来,有高人指点——球的跟踪可以这样改进:1.改用网球,滚动的速度慢;2.与背景颜色相差较大的情况下,可以改用色块检测而非球体检测,球体检测的速度慢;3.利用近大远小的道理,控制小车的前进。例如卡片识别,会输出图像中的长宽值,利用这两个值的变化,可以判断卡片离的近了还是远了 程序在下面了:用的色块识别,果然反应够快。 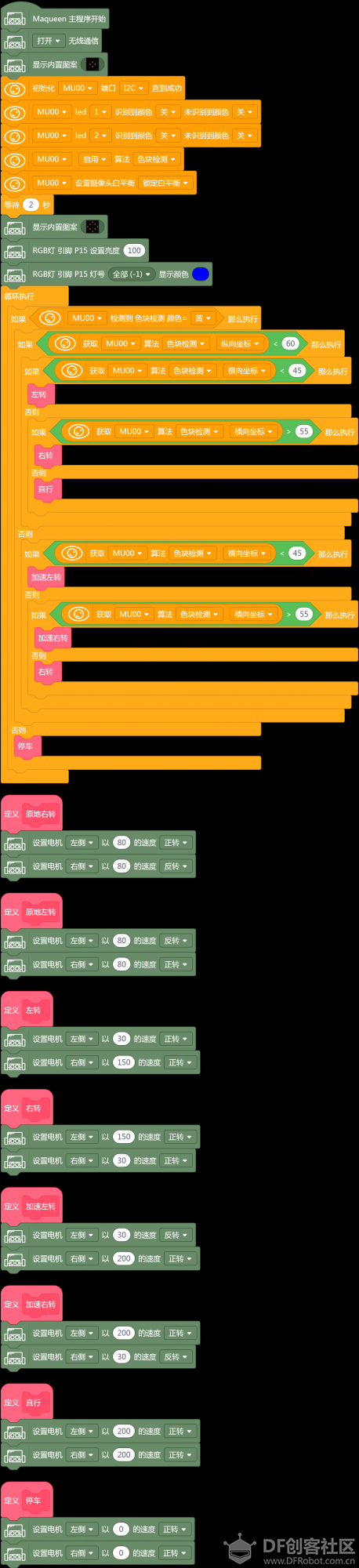 这只是一个抛砖的帖子,希望大家可以有更好的项目出来。  麦昆与球1026.zip 麦昆与球1026.zip |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









