|
3989| 0
|
[项目分享] 桌面新宠--小二哈 |
|
养条萌萌的二哈,放桌面上。 不需狗粮。 不用溜它。 不要铲屎。 不怕它吵。 它就是我的桌面新宠小二哈。 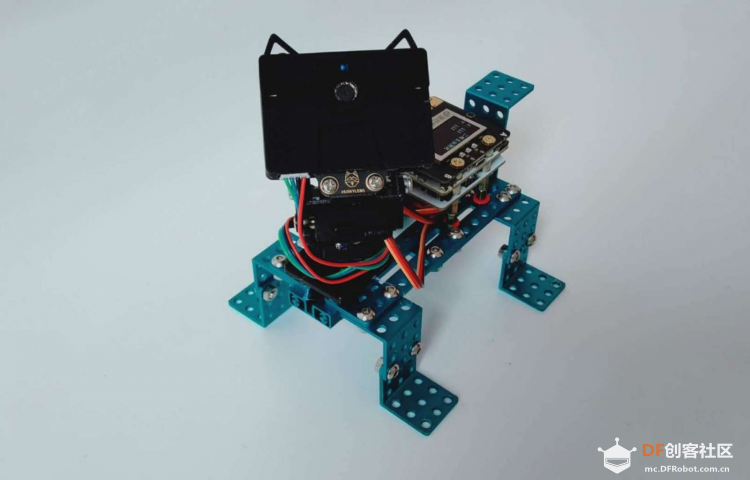 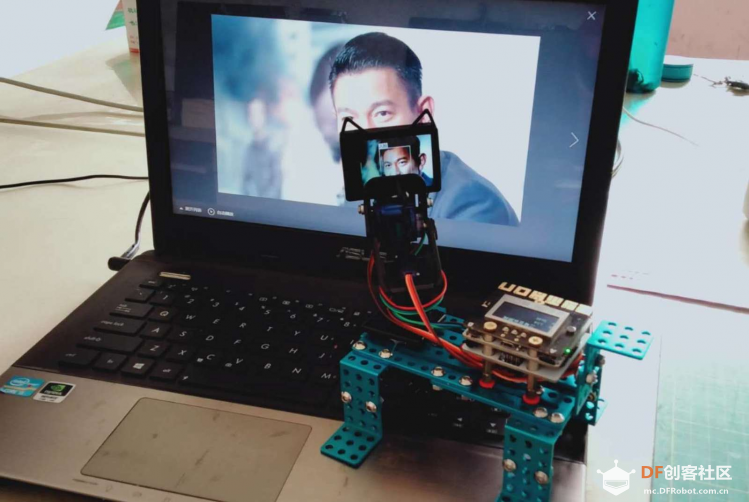 现在它就在我的桌子上,我在慢慢的打字,它盯着我的脸,跟着我的脸扭脖,点头,一脸崇拜(haha)。 一开始,我只为调试云台,到后来,做成了这条小狗。 喜欢它。 材料清单 1x 二哈1x 二哈头套1x 迷你云台2x 180度9g舵机1x 掌控板1x N+百灵鸽(掌控扩展板)1x MK结构件或者其它结构件大家记得宣传视频盯着人脸的那个机器人,我也想有一个盯着我的二哈(哈哈)。 组装云台 装上二哈,接上鸽子 二哈接支架,支架再用自攻丝接云台,宽窄都是恰好,就像是定做的一样。 【这个发现来自张玉华老师】 二哈接IIC,注意接线正确。 学习狄老师教程 基于HuskyLens人脸识别的二自由度自动跟踪云台 https://mc.dfrobot.com.cn/forum.php?mod=viewthread&tid=302428&fromuid=727937 认真研读,认真研读,认真研读。 狄老师思路写的很详细的,请认真研读,我这里不啰嗦啦。  参考狄老师程序(第一版) 参考程序,其间还测试了舵机转动和大小角度。 大家做的时候都要再测试下哈。 步骤5优化程序 上面的程序基本实现了人脸跟踪,可是二哈头有点不安分。 优化程序舵机转向调速如下: 步骤6搭建身体,做成二哈 开心逗狗啦。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









