|
26047| 11
|
[求助] 180度舵机和360度舵机的控制方法有什么不同? |
|
本帖最后由 Forgotten 于 2020-5-19 12:30 编辑 这里不普及180和360舵机的底层控制逻辑了,网上一搜很多资料,例如 180和360舵机的学习与分辨 。 另外180和360舵机不是由外观决定的,不是蓝色的就是180黑色360。 实际上蓝色的也有360的舵机,购买的时候要看清楚。  那么两种舵机的控制在程序上有什么区别吗? 答案是:可以用同一个指令控制两种舵机 测试方法: 我们以Mind+(Arduino ide同理)中的舵机控制指令来进行测试:  效果: 用一张图说明180舵机与360舵机使用同样的命令来控制的出来的效果: 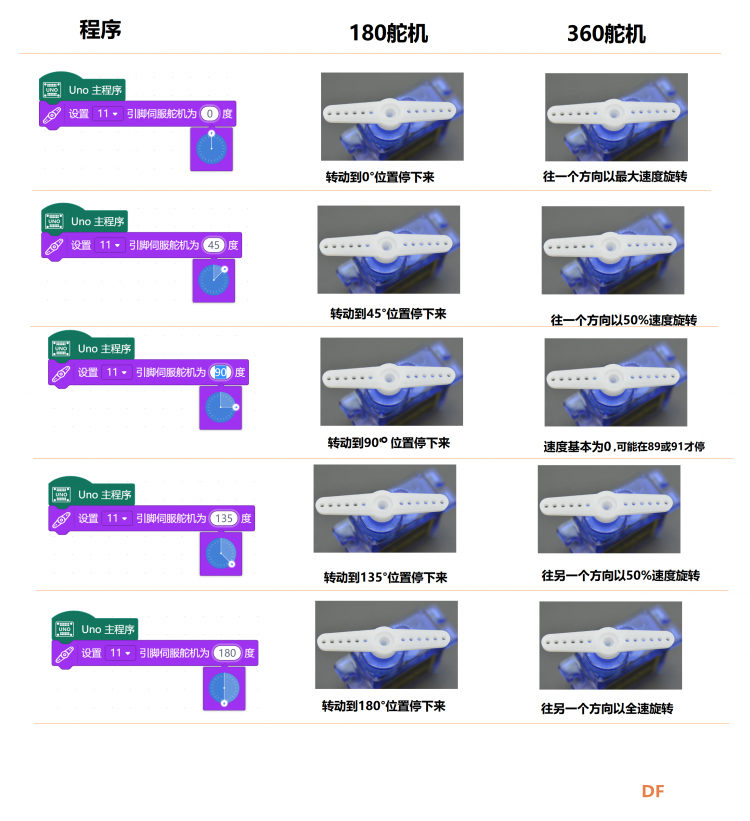 总结一下就是: 180舵机:指定多少角度,就转到对应角度 。 360舵机:根据偏离停止点(90左右)控制速度,根据偏离方向决定旋转方向,不能停在某个位置。 如何选择: 如果是要指定到位置的应用,例如控制一个门的打开与关闭,选择180舵机。 如果需要一直旋转,控制速度和方向,例如作为一个小车电机,选择360舵机。 360舵机的问题: 优点:360舵机等于一个自带驱动的电机,直接使用常用的3Pin引脚即可控制,不用像普通黄色电机一样还要额外使用一个电机驱动模块进行控制 缺点:因为使用了舵机信号控制,因此不太精准,另外根据舵机的生产精度问题,在不带负载的情况下360舵机可能会停不下来轻微转动,或者在91或者89才能停下来,这是正常现象,一般轻微调整位置或加上负载都可以使之停下来,另外如果一直乱转不受控制可能是供电不足。 |
Forgotten 发表于 2020-6-4 22:20 不对吧,我的是360的,但是我就是调整它转动的时间,也成功了,就是有点误差…… |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶











