|
17815| 2
|
[项目分享] 【麦昆Plus】基于Mind+的无线控制麦昆行车记录仪 |
 一、【项目背景】 行车记录仪又叫行车记录器,它能够在司机驾驶的过程中客观和精准的记录全程的行驶状态,例如车子前进和后退、减速与加速、转弯变向等参数。能够将采集到的数据实时显示出来,供驾驶者掌握车况。 今天通过掌控板UDP无线控制,实时显示Plus 的车速数值,下面让我们一起来分享作品吧! 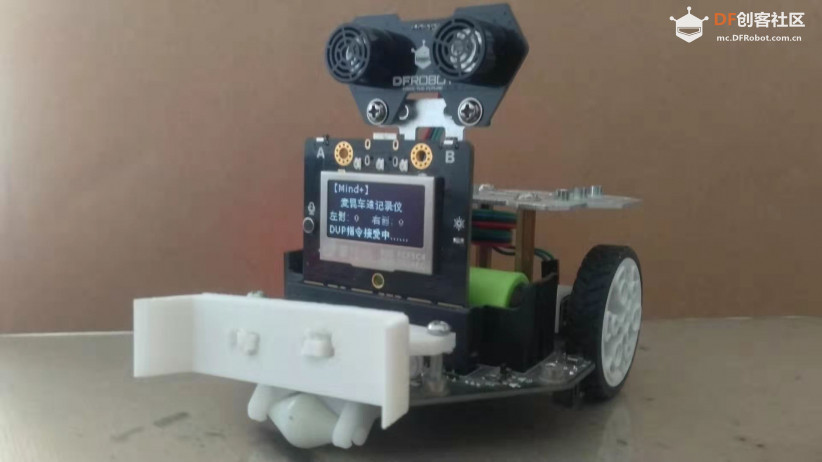 二、【设计思路】 1.首先将所有掌控板放在一个无线局域网下,通过UDP通讯协议,每一个掌控板都有对应的IP地址,以掌控板A为服务端组建局域网并发出指令,掌控板B接入局域网接受掌控板A指令; 2.在UDP协议,实现无线手柄掌控板A对麦昆Plus的控制; 3. 麦昆Plus的通过掌控板B实时显示麦昆 Plus 的车速实时数据;  三、【认识UDP】 UDP协议,是User Datagram Protocol的简称, 中文名是用户数据报协议,是OSI(Open System Interconnection,开放式系统互联) 参考模型中一种无连接数据的传输层协议,提供面向事务的简单不可靠信息传送服务。具有两个明显特性: 1.UDP 是无连接的,发送数据之前不需要建立连接,只需要知道接收方的IP地址和端口号就可以发送数据;减少了开销和发送数据之前的时延; 2.UDP的消息传输不可靠的。只负责数据的发送,不关心数据是否送达,没有确认机制,主机收到数据也不会有响应,所以称之为消息不可靠。 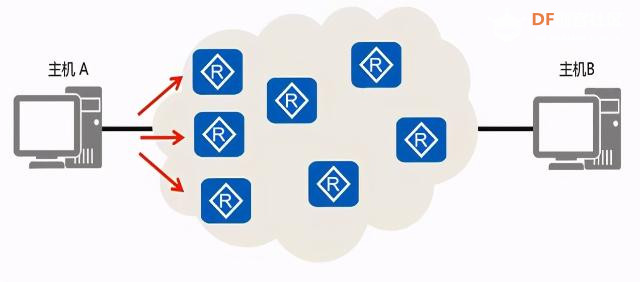 四、材料清单 1.掌控板X1 链接 2.麦昆PlusX1链接 3.Mind+链接  五、【指令学习】 1.认识电机速度指令:读取当前电机运行的速度数值; 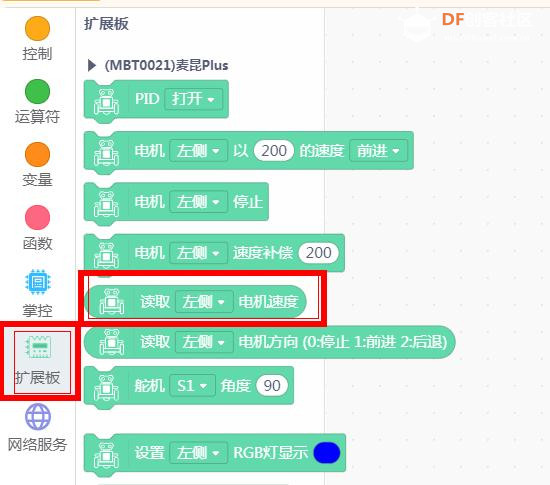 2.屏幕显示指令:将车速数值显示在掌控板OLED屏幕上; 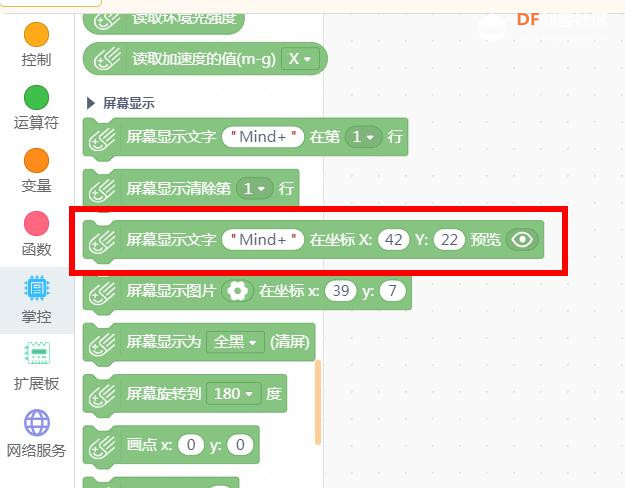 3.UDP广播指令:设置UDP客户端连接服务器的IP地址和端口。  (一) 掌控板A无线手柄——UDP服务器端 1.打开Mind+v1.6.4,连接设备COM46; 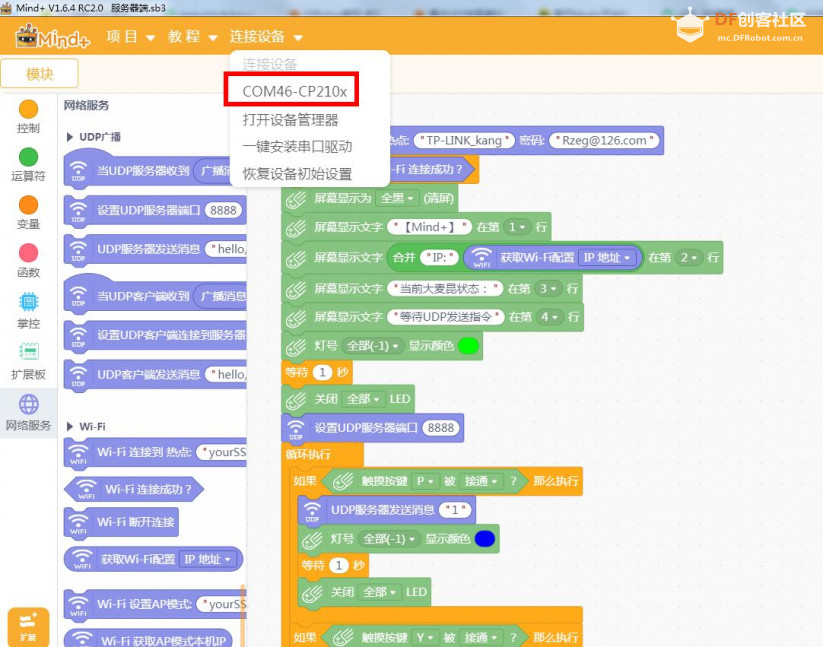 2.左下角点击扩展添加主控板:掌控板; 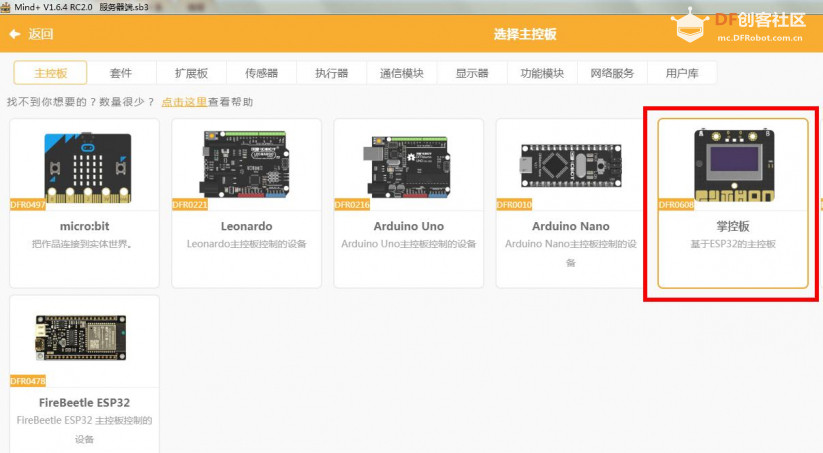 3.左下角点击扩展添加网络服务:UDP指令和Wi-Fi;  4.掌控板A无线手柄----服务器程序 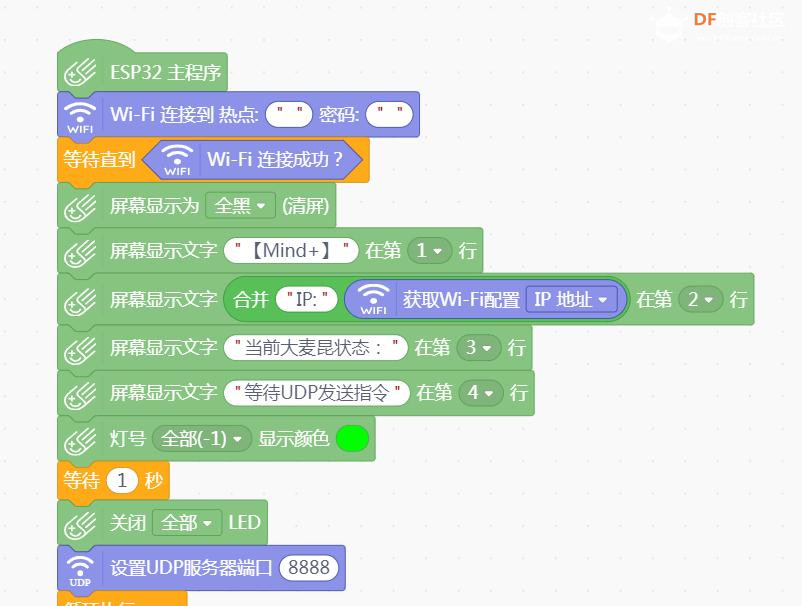 上电后,初始wifi参数,显示掌控板A的ip,服务器和客户端端口一致,显示当前plus运动状态. 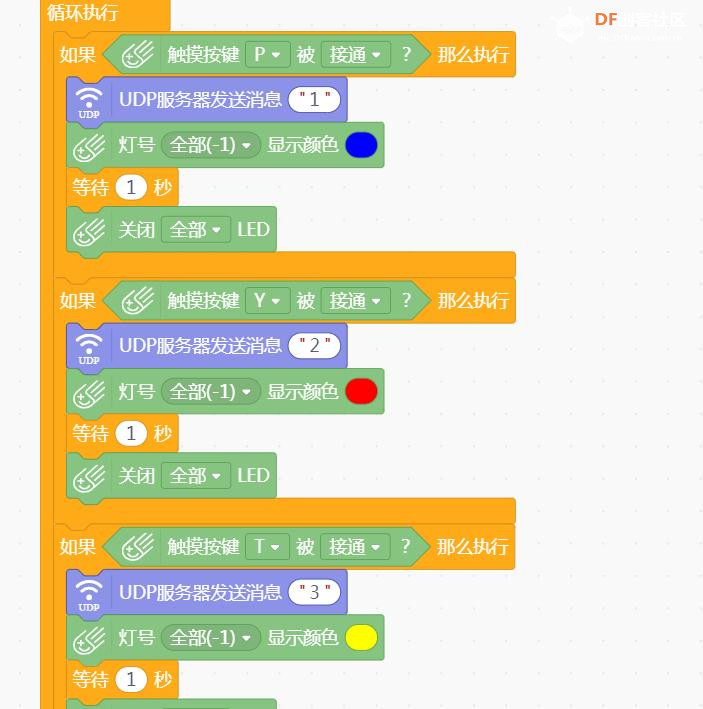 通过UDP协议,当按下掌控板A端p键时,服务器端发出消息1; 当按下掌控板A端Y键时,服务器端发出消息2; 当按下掌控板A端T键时,服务器端发出消息3; (二) 掌控板B麦昆Plus——UDP客户端 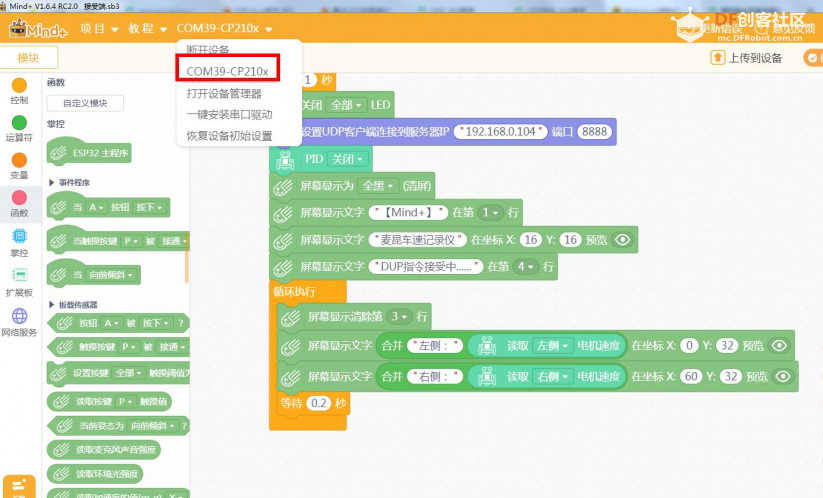 1.打开Mind+v1.6.4,连接设备COM39; 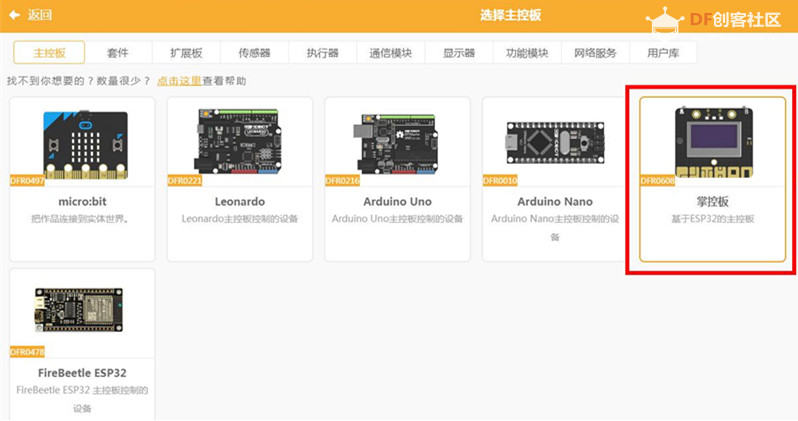 2.左下角点击扩展添加主控板:掌控板;  3.左下角点击扩展添加扩展板:麦昆Plus;  4.左下角点击扩展添加网络服务:UDP指令和Wi-Fi; 5.掌控板B麦昆Plus——UDP客户端程序 上电后,初始wifi参数,设置服务器端掌控板A的ip,服务器和客户端端口一致, 实时显示当前plus电机运行数值状态.  通过UDP协议,当收到服务器A端发出消息1;客户B端麦昆plus小车前进; 当收到服务器A端发出消息2;客户B端麦昆plus小车前进; 当收到服务器A端发出消息3;客户B端麦昆plus小车停止。 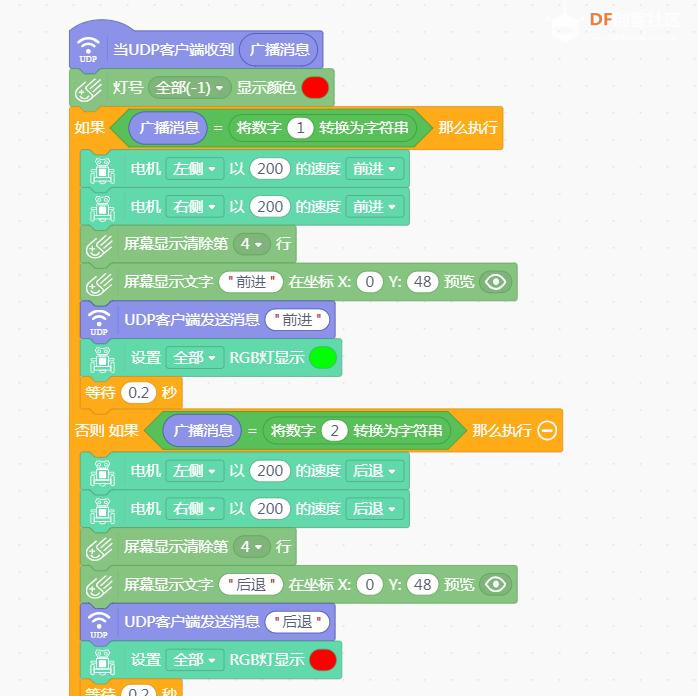 七、【视频回放】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






