第20课:Vibration微型振动模块
前言
导语
前面我们已经介绍了数字大按钮模块,今天我们利用数字大按钮模块加上Vibration
微型振动模块控制其震动来给大家做一个简单项目。
介绍Vibration微型振动模块
振动模块采用振动电机作为激振源,振动电机是在转子轴一端安装一组可调偏心块,利用轴及偏心块高速旋转产生的离心力得到激振力。
学习准备
所需原件
学习内容
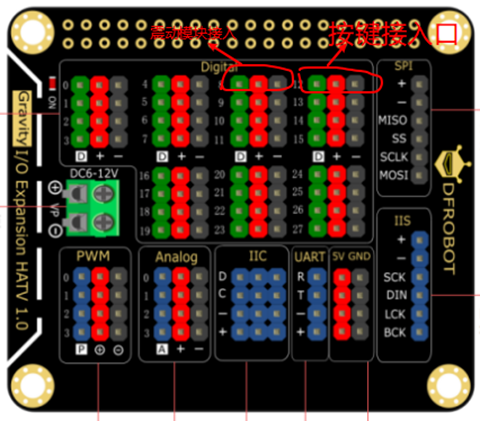
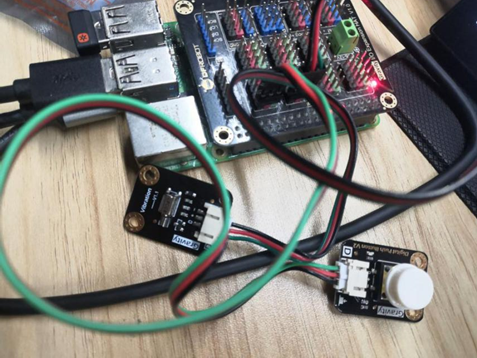
硬件连接
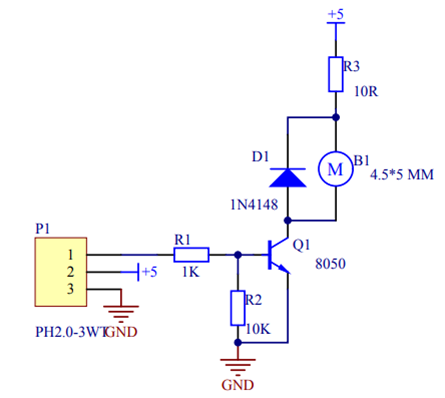
原理图
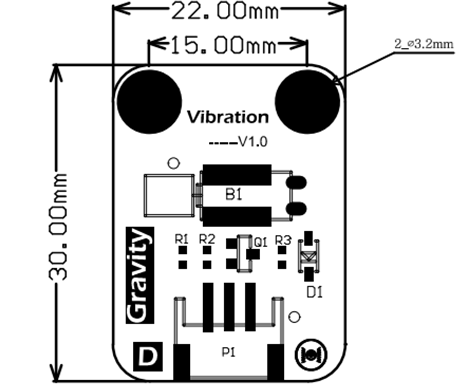
原件布局图
- 当我们按下开关后,振动器开始振动,时间为5s,然后停止,等待下一次的按键触发。
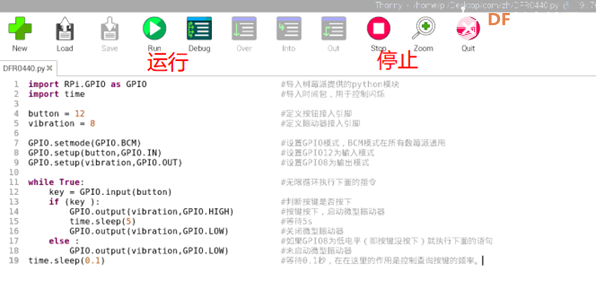
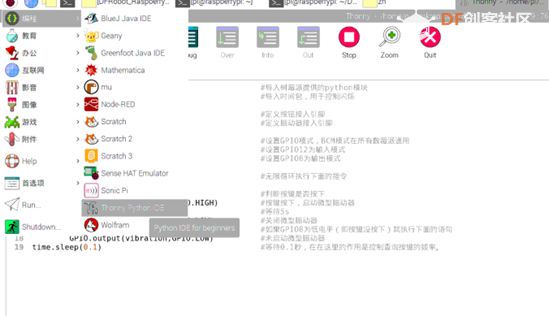
软件程序
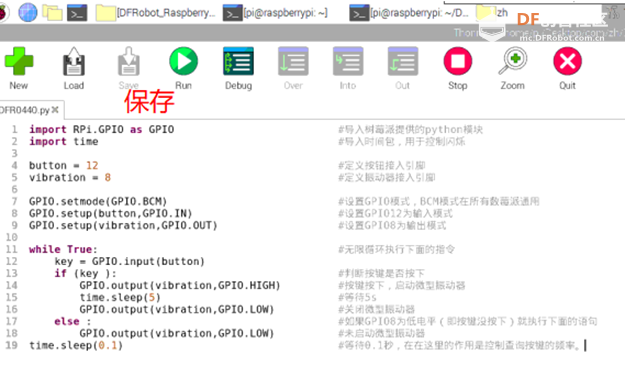
import RPi.GPIO as GPIO #导入树莓派提供的python模块
import time #导入时间包,用于控制闪烁
button = 12 #定义按钮接入引脚
vibration = 8 #定义振动器接入引脚
GPIO.setmode(GPIO.BCM) #设置GPIO模式,BCM模式在所有数莓派通用
GPIO.setup(button,GPIO.IN) #设置GPIO12为输入模式
GPIO.setup(vibration,GPIO.OUT) #设置GPIO8为输出模式
while True: #无限循环执行下面的指令
key = GPIO.input(button)
if (key ): #判断按键是否按下
GPIO.output(vibration,GPIO.HIGH) #按键按下,启动微型振动器
time.sleep(5) #等待5s
GPIO.output(vibration,GPIO.LOW) #关闭微型振动器
else : #如果GPIO8为低电平(即按键没按下)就执行下面的语句
GPIO.output(vibration,GPIO.LOW) #未启动微型振动器
time.sleep(0.1) #等待0.1秒,在在这里的作用是控制查询按键的频率
-
保存文件。
-
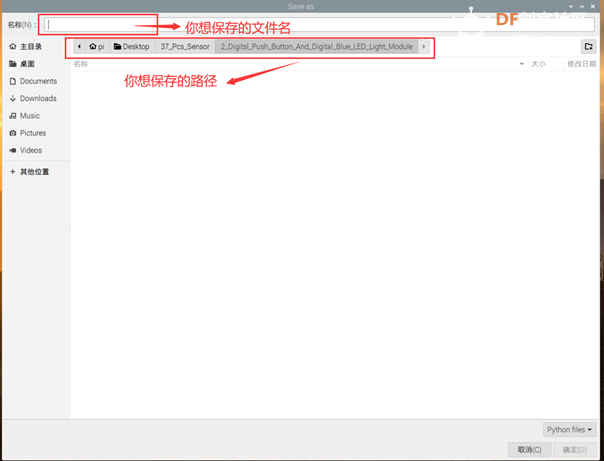
选择保存路径和文件名。
-
点击运行,通过测试,可以看到效果。
| 



 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







