|
20135| 1
|
[教程] 无人机编程教学设计—课时3:山区紧急救援 |

|
无人机编程教学课程设计—山区紧急救援 教学目标 一、通过教学使学生完成以下学习目标 1 | 机甲s1载人巡线行走 2 | 无人机编队飞行 3 | 学习Mind+无人机编队指令 4 | 学习选择结构流程图 5 | 无人机山区事故营救模拟 二、教学难点 1 | 无人机编队飞行变换队形学习 2 | 选择结构流程图 课程引入 一、亲爱的同学们,救援小组准备好了吗?今天又有新的任务,多架无人机组队飞行学习,并完成山区小车事故模拟救援任务。  英国空中救援纪录片(因版权原因未上传视频-爱奇艺) 知识原理讲解 一、机甲s1识别蓝线行走,学习最基础的巡线功能。机甲程序初始化时,开启线识别功能,  开启后,机甲拥有识别线功能,设置识别线的颜色为蓝色  这时在地上贴上蓝色线胶带。机器人行走时就可以进行线识别。获取识别线的数量  来判断控制机器人行驶的速度和方向,即可完成编程任务。如图:  二、无人机编队飞行是一个很有趣的飞行方式,变化多样,创意有趣。设置好无人机的路由器连接模式后,Mind+功能模块选择RoboMasterTT组队,进行编队编程。今天的编队任务是两架无人机变换队形飞行,先直线飞行,然后变换为纵线飞行。  三、选择结构流程图进阶学习 (实施教学时:贴近生活举例)  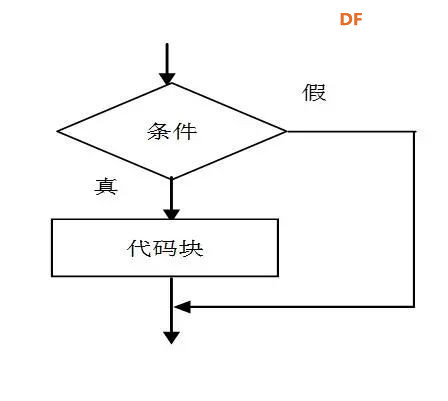  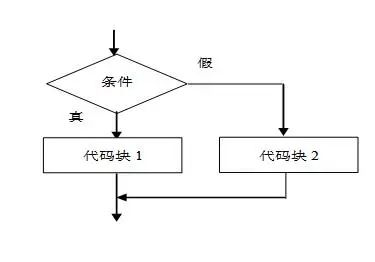   项目实施步骤 一、课程代码图 机甲代码图  无人机编队代码图 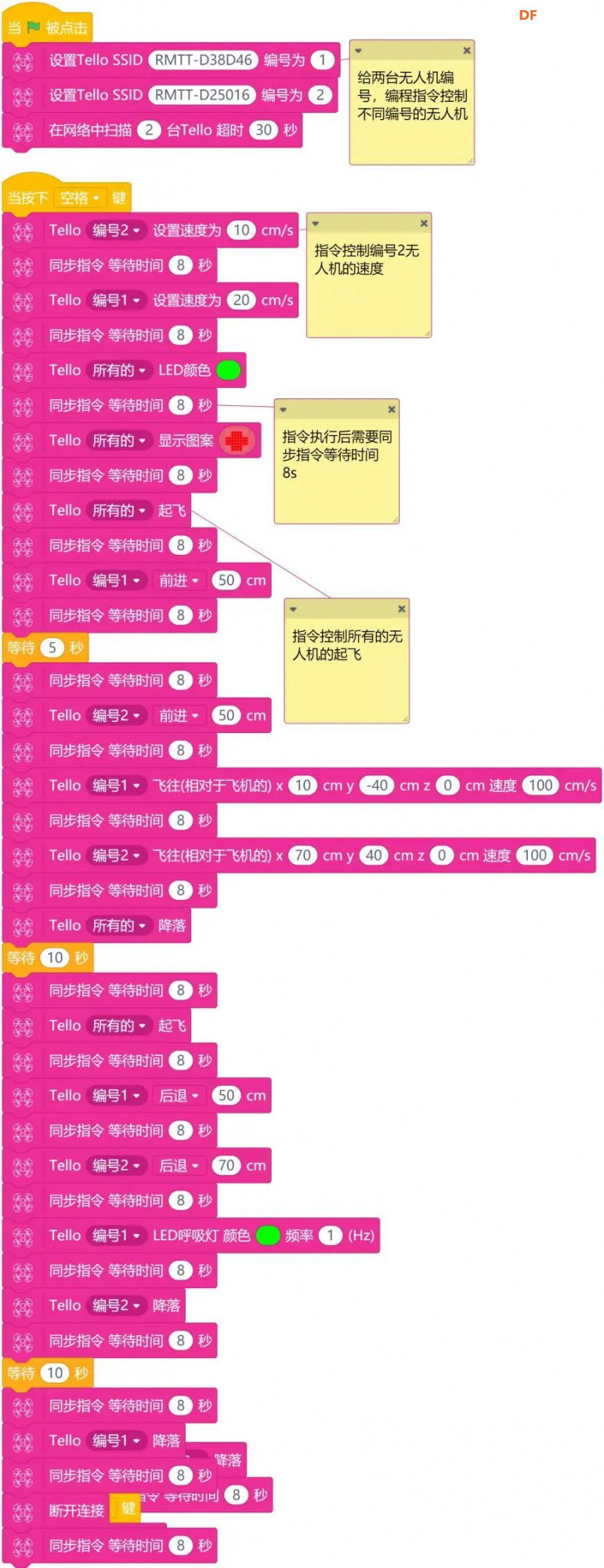 二、器材设备清单 | 机甲S1 数量1个 | TT无人机 数量2台 | 蓝色纸胶带 数量1卷 | 书籍或积木方块 数量若干 | 其他器材与课时1相同 三、任务流程图 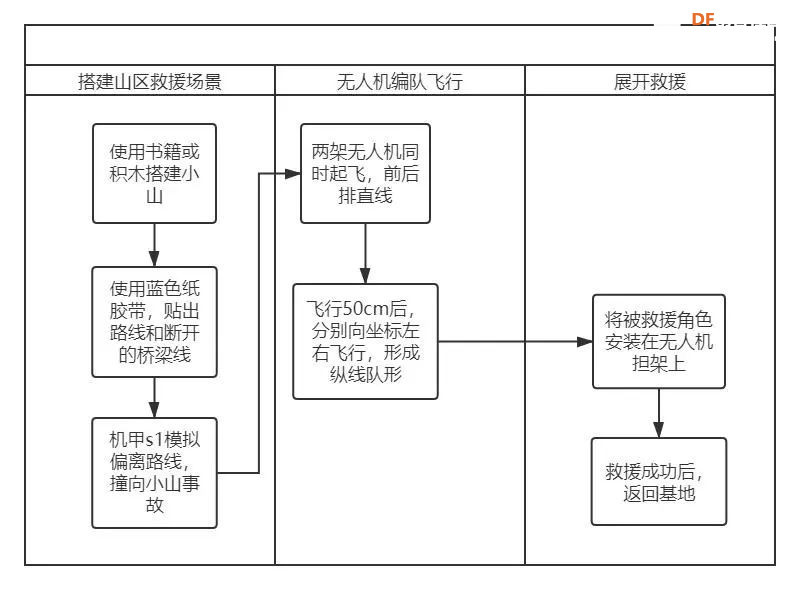 四、任务步骤 步骤1:用书搭建山区救援场景。  步骤2:使用RoboMaster APP,连接机甲S1(省略,详情查看下方视频连接)。连接机甲S1后,进入APP中实验室开始创建我的程序。 步骤3:完成多架无人机的模式切换和路由器WIFI的连接(省略,详情查看下方视频连接)。 步骤4:开始任务编程,根据项目思维导图完成编程代码。  步骤5: 使用机甲S1完成模拟山区撞车事故,将积木小人放在S1上。运行机甲S1程序,完成模拟。 步骤6: 实施编队飞行的营救,将两台无人机直线前后摆放,间隔50cm,运行无人机程序,学员进行分工合作(小医生、小工程、小飞行员),完成营救工作。可以多次尝试,并学会解决任务营救中遇到的问题。 视频演示: 项目拓展 一、课后思考,编队飞行,两架无人机还可变换哪些队形?试一试。 安全事项 一、无人机编队飞行时,控制两架无人机间距在50cm左右,防止无人机发生碰撞事件。 二、机甲s1模拟碰撞事故时,控制机甲的速度,防止机甲出现碰撞损失。 三、其他与课时1安全事项雷同 课后总结 一、今天学习了综合运用机器人的特点模拟任务。 二、学习控制机甲S1的线识别。 三、学习编队的组队飞行和队形变换。 四、学习选择结构流程图的多种表现方式。 学员项目评价  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






