|
4341| 0
|
无人机编程教学设计—摩托车事故救援 |

|
无人机编程教学设计—06 摩托車事故救援 小小鲁创客 张文科 该课程为《ROBOMASTER TT无人机编程教学开发大赛》—“最佳创意奖”系列课程作品 课程目录 教学目标 一、通过教学使学生完成以下学习目标 1 | 学习时间统筹规划 2 | 学习环境光传感器 3 | 学习Mind+环境光传感器指令 4 | 学习环境光传感器的无人机组装 5 | 学习循环结构流程图进阶 6 | 无人机模拟任务救援 二、教学难点 1 | 环境光传感器扩展的Mind+编程 2 | 循环结构流程图(多个流程图) 课程引入 一、亲爱的同学们,救援小组准备好了吗?今天又有新的任务,运用环境光传感器模拟营救任务,当救援任务快结束时,由于暴风雨来临,天空变暗,无人机救援队紧急返航。  英国空中救援纪录片(因版权原因未上传视频-爱奇艺) 知识原理讲解 一、华罗庚时间统筹法 统筹方法,是一种为生产建设服务的数学方法。它的实用范围极为广泛,在国防、在工业的生产管理中和关系复杂的科研项目的组织与管理中,皆可应用。 比如泡茶,开水壶不洗,不能烧开水,因而洗开水壶是烧开水的先决问题,没开水、没茶叶、不洗壶杯,我们不能泡茶。因而这些又是泡茶的先决问题。 办法甲:洗好开水壶,灌上凉水,放在火上;在等待水开的时候,洗茶壶、洗茶杯、拿茶叶;等水开了,泡茶喝。 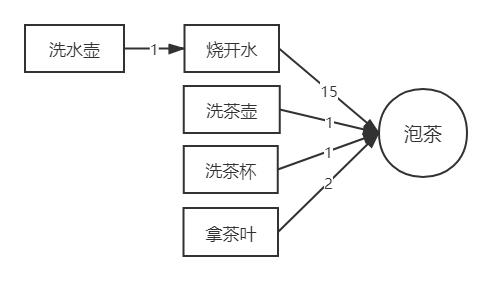 办法乙:先做好一些准备工作,洗开水壶,洗壶杯,拿茶叶;一切就绪,灌水烧水;坐待水开了,泡茶喝。  办法丙:洗净开水壶,灌上凉水,放在火上;坐待水开,开了之后急急忙忙找茶叶,洗壶杯,泡茶喝。  哪一种办法省时间?谁都能一眼看出,第一种办法好,办法甲总共要16分钟(而办法乙、丙需要20分钟)。如果要缩短工时、提高工作效率,主要抓的是烧开水这一环节,而不是拿茶叶这一环节。同时,洗壶杯、拿茶叶总共不过4分钟,大可利用“等水开”的时间来做。 二、数字式环境光传感器 测量不同环境下光的强度,并以10进制的数字传输。单位是lx。它的测量精度高,量程较广,探测范围从0lx到120klx。 TT扩展板11mm排针焊接流程省略,参考(课时2.海上轮船救援) 环境光传感器针脚连接方法: 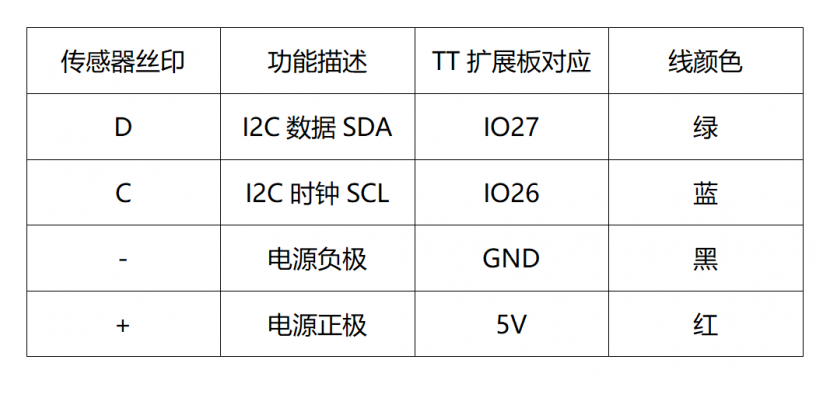 连接如图: 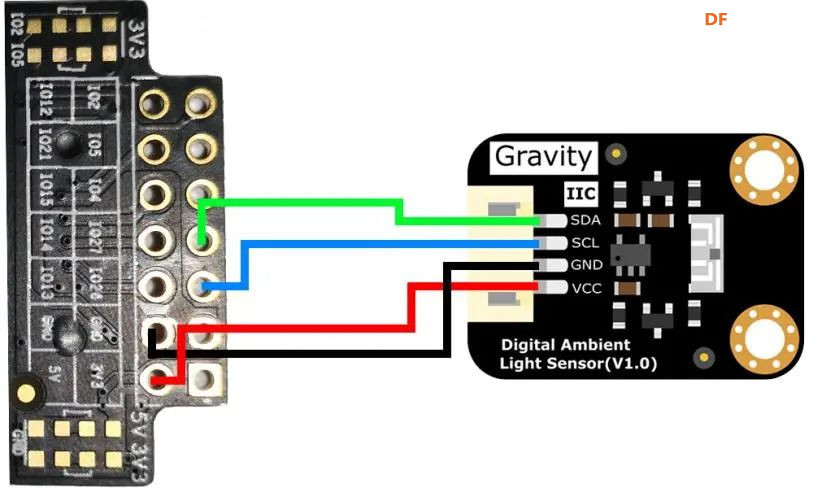 TT扩展板安装好手势传感器图:  三、循环结构流程图进阶 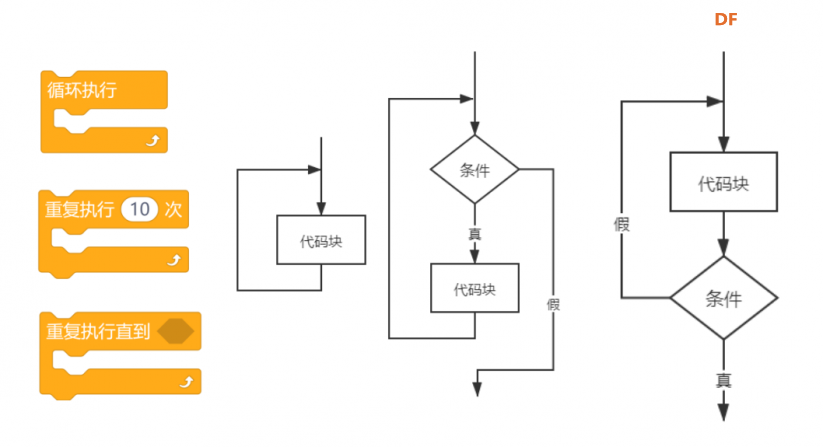 Mind+图形编程中的几种循环指令,从上至下,对应从左至右流程图。循环结构流程图图帮助同学们理解程序运行顺序,同时也是编程考试重点。 四、倒计时功能制作 使用直到循环指令与变量的结合,实现倒计时功能。初始化时间变量120.然后倒计时。 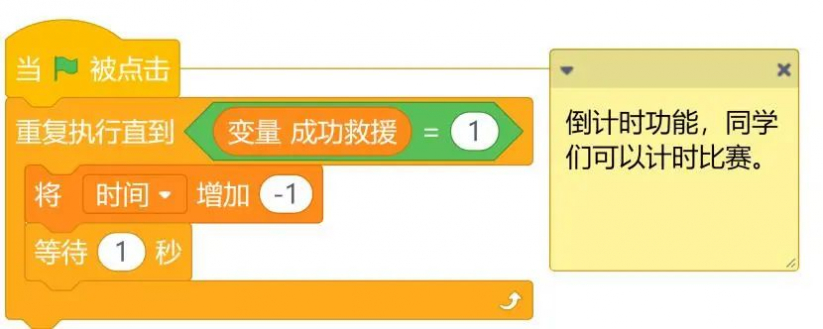 项目实施步骤 一、课程代码图 实时模式代码图: 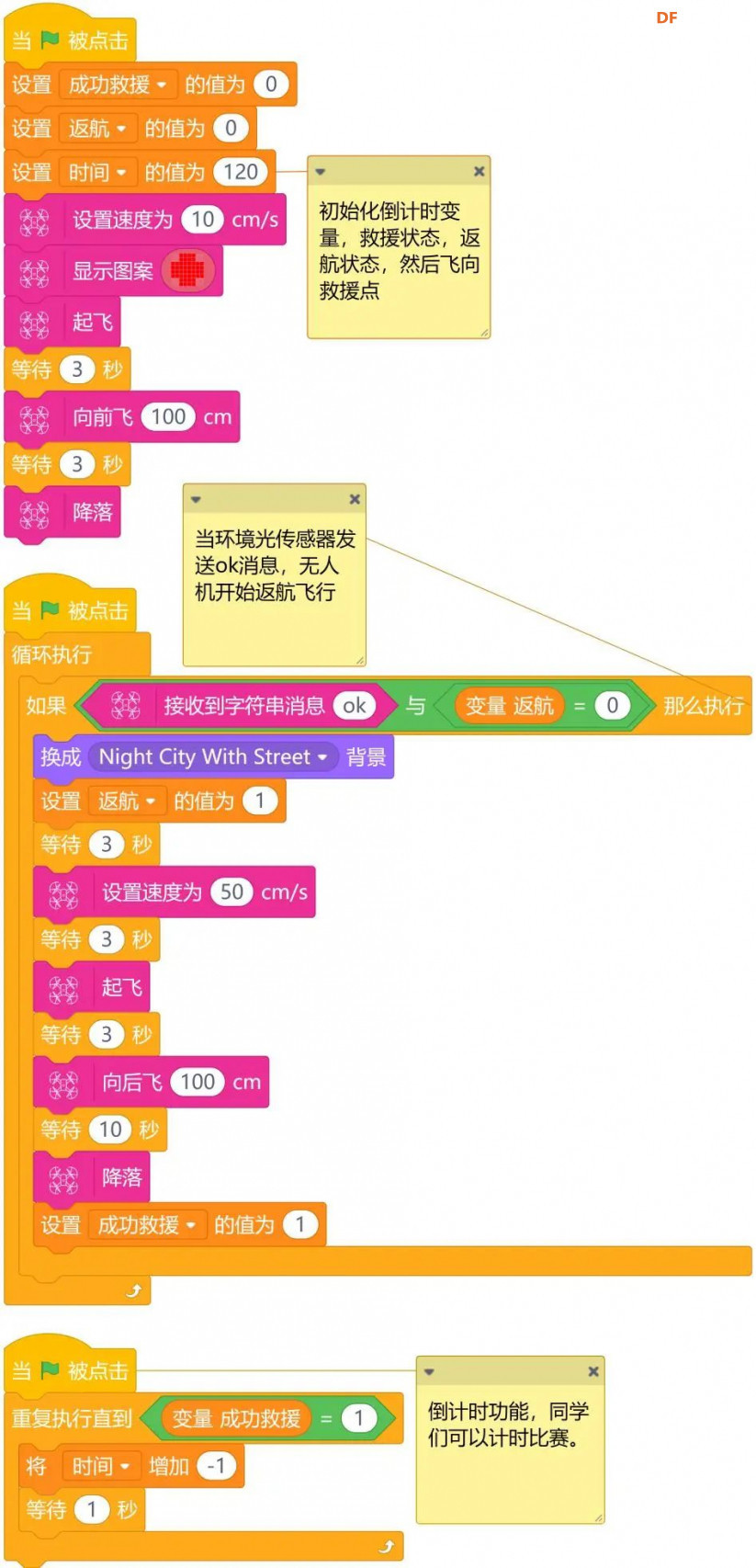 上传模式代码图:  二、器材设备清单 | 数字环境光传感器 数量1个 | 橡皮筋 数量1个 | 固定传感器结构件 数量1个 | 摩托车积木 数量1个 | 其他器材与课时1相同 三、任务流程图 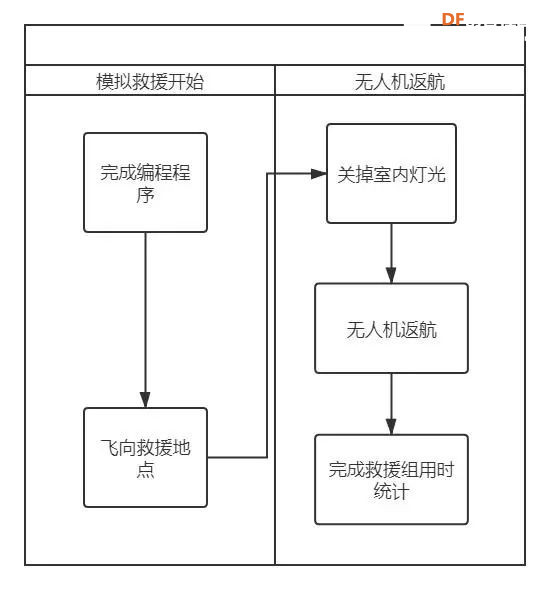 四、任务步骤 步骤1:无人机安装数字传感器 (参考:知识原理二) 步骤2:根据任务思维导图完成实时模式编程 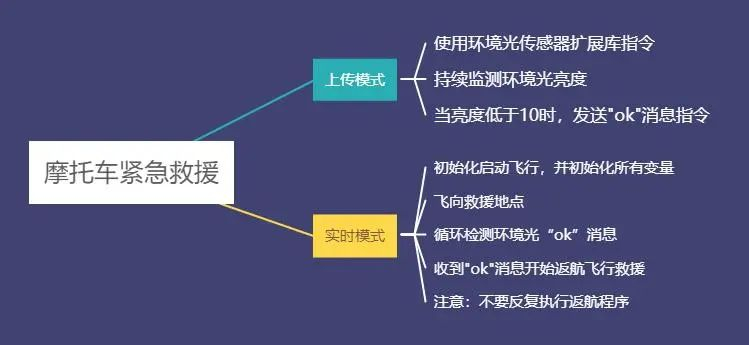 步骤3:usb线连接TT扩展板,进行上传模式编程,并在Mind+中添加扩展用户库,环境光传感器第三方库。 步骤4:实施模拟营救任务,学员进行分工合作,小医生、小工程、小飞行员(可轮岗安排)。 小医生工作:1.安装小人到担架上。2.将担架挂到无人机吊钩上。 小工程师工作:1.准备无人机 2.准备紧急降落3.搭建场景 小飞行员工作:1控制室内灯光 步骤5:统计不同救援小组的模拟任务完成时间。 视频演示 项目拓展 一、同学们学习了数字环境光传感器的编程,用它控制无人机,想想其他有趣的玩法。 安全事项 一、安装数字传感器时,确保操作安全。 二、与课时1安全事项雷同。 课后总结 一、学习了华罗庚统筹方法,以及时间管理要领 二、学习了循环结构流程图的进阶 三、掌握无人机安装数字环境光传感器并变成控制 学员项目评价  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






