|
5173| 0
|
[入门] 舵机的声源定位方向控制测试 |
本帖最后由 VCCLCiKofBAo 于 2023-9-22 16:00 编辑  利用声源定位板让舵机可以根据声源位置定位来控制舵板的方向.因为声源定位板本身已经给出了6个方位高电平的脚位.所以只需要我们在Arduino内调用舵机的程序库.然后各自赋予每个相应角度的各种的舵机角度值就可以做到.声源定位板介绍: 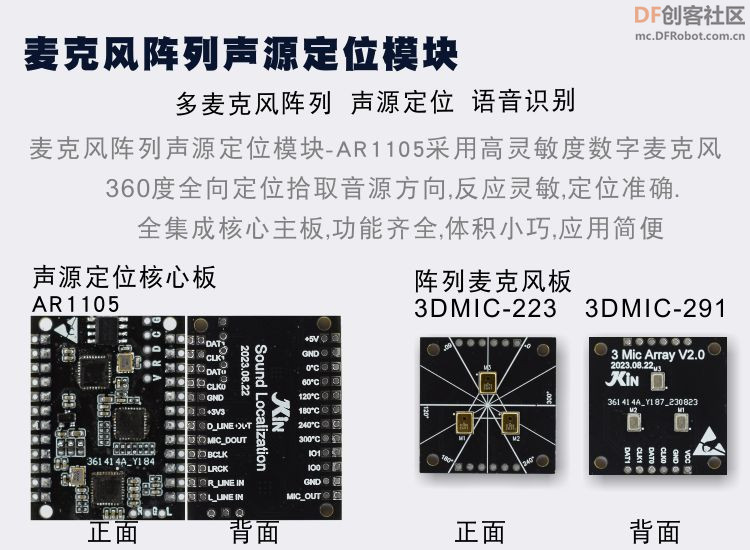 声源定位核心板上面集成了360度的方位引脚,采集到某个角度的声源,会在相应角度的脚位上输出一个高电平.我们只要把这个电平信号在Aduino上设置为输入脚.然后输入伺服马达转到相应的方向就可以实现. 麦克风阵列板采用的是3个数字麦克风的微型阵列.可以全向360度采集声源.定位的角度为6个方向. 因为这套声源定位板的尺寸比较小.所以可以应用在很多制作上面. 下一步准备用这套板子做个声源定位小车.有点像电子宠物狗一样.可以可以根据我们呼唤的声源定位到方向位置,回到我们的身边. 目前做的这个测试只是一个初步的DEMO,后期会慢慢更新的东西和功能. |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






