跟着思兼学习Klipper(28):无接触线刷Klipper固件:千秋万载,一统江湖之Katapult
前言
原创文章,转载引用请务必注明链接,水平有限,如有疏漏,欢迎交流指正。
文章如有更新请访问 DFRobot 社区及 cnblogs 博客园,前者内容较全,后者排版及阅读体验更佳。
看过我学习 Klipper 系列文章的,都知道我一直在寻找 油腻的师姐在哪里 一个满意的 Bootloader,期望其有如下特点:
- 占用空间小,避免需要裁剪 Klipper 功能
- 支持无接触线刷,不需要拆开电气舱手动将设备进入烧录模式,全部在上位机上完成。
- 支持多种微控制器芯片
- 简单易用,最好有配置界面而不是修改源码来设置
- 支持多种线刷模式:CanBUS、USB、Serial 等
本文介绍 Katapult(formerly known as Canboot)这一引导程序 (Bootloader),它可以极大方便我们烧录、升级主板 Klipper 固件。既往 Canboot 主要用于 Can 工具板的固件升级,现在也支持 USB 和 Serial 通讯方式的主板升级了。
我们约定:上位机指运行 Linux 的 MPU 部分,也称为 host。下位机又称 MCU、控制板。
名词解释:
-
Bootloader:最主要的作用就是方便咱烧录升级固件,毕竟不是谁家都有串口和 SWD 调试模块的
-
卡刷:传统的使用 编译好的固件拷贝到 SD 卡,插入主板升级固件
-
线刷:使用上位机完成固件烧录,无需 SD 卡,进需要数据线连接即可
-
无接触线刷:使用上位机完成固件编译、烧录、升级,无需打开电气舱,<u>无需接触打印机主板</u>
软硬件环境:
- RK3399 上位机,Ubuntu 22.04.3 jammy
- MKS Monster8 v1,使用 USB (PA11/PA12) 通讯
- Gokit2 机智云 2 代,使用 UART (PA9/PA10) 通讯
本文涉及的内容:
- 不同 Bootloader 及主板升级方式的对比
- Katapult 的介绍与使用
- 使用 RaspberryPi DebugProbe (Pico) + OpenOCD 通过 SWD 接口烧录主板固件
- 使运行 Klipper 固件的主板进入 Bootloader 模式
1、现状
1.1 不同的 BootLoader
由于接触 Klipper 固件相对比较早,接触了很多 Marlin 时代设计的主板,以现在常见的 STM32 主控芯片为例,烧录升级主板固件的方法有如下:
-
SD 卡升级 | 基本都支持,将编译好的主板固件拷贝到 SD 卡中,插入主板插槽上电等待烧录、更新完成
-
SDCard updates | 伪线刷,在主板上保留 SD 卡不取出,实现线刷功能
-
3.3v serial | 主板进入 ISP 烧录模式后,通过 UART 烧录固件
-
USB DFU | STM32F4 等主板进入烧录模式后可以通过 USB 接口烧录固件
-
stm32duino bootloader| 8KiB STM32F103,为 F103 芯片带来 DFU USB 烧录功能,dfu-util
-
HID bootloader | 无需驱动, 2KiB 0n STM32F10x,16 KB on STM32F4xx,hid-flash
-
MSC bootloader | STM32F103/STM32F072 | 8KiB or 16KiB ,无需驱动,dfu-util
-
CanBoot/Kataplut bootloader | STM32F103/STM32F0x2
-
mks bootloader | 48KB
-
chitu bootloader | 专有,需要后处理
注意 STM32F4 系列引导至少 16KB,H7 系列至少 128KB
1.2 常见主板固件更新方式
这两部分我不想赘述,凑合看吧。
- STM32F103
- USB:线刷需要使用第三方引导
- UART:使用一个额外的引脚,将主板重置进入烧录模式
- 特立独行的 MKS,我们的老熟人又来了,特指之前的 MKS Robin Nano 系列,通讯接口不是 PA9/PA10,无法串口烧录固件,只能卡刷或者伪线刷
- STM32F4、F0x2、H7
- USB DFU
- 3.3v serial
- Can 工具板,Katapult
2、Katapult 介绍与使用
项目主页:https://github.com/Arksine/katapult ,查了下英文意思是弹射器,具体咱也不清楚。
很久之前就听过 Canboot,感觉有点绕就一直没仔细研究,后来发现改名了,并且额外支持 USB 和 UART 模式了,不禁让我想起了之前的 MKS Robin 系列主板。看看它的特点:
- 针对 ARM Cortex-M 系列主控芯片的引导程序
- 支持 CANBUS, USB 以及 UART 通讯接口
- 目前支持 lpc176x, stm32 以及 rp2040 系列主控芯片. CAN 方式目前仅支持 stm32 F 系列和使用 rp2040 芯片的设备。
2.1 编译使用 Katapult
和 Klipper 的编译方式很相似,我们编译出 katapult BootLoader,然后使用编程器或者 3.3v serial/USB DFU 等方式 <u>覆盖原来的引导</u>(如果有)。
cd ~
git clone https://github.com/Arksine/katapult
cd ~/katapult
make menuconfig
make

注:上图 USB DFU 模式应该和 3.3v serial 一起。
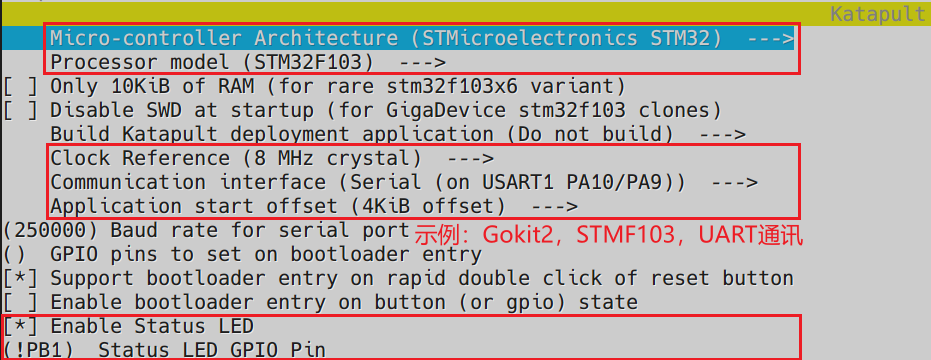
编译选项介绍:
-
Microcontroller Architecture: 选择主控芯片架构:lpc176x, stm32 and rp2040
-
Processor model: 选择具体的型号
-
Build Katapult deployment application: 默认不要改动,无编程器环境下使用原 BootLoader 安装 Katapult
-
Disable SWD at startup: 兆易创新的 GigaDevice STM32F103 克隆版芯片使用,由于未测试,不保证能用
-
Clock Reference: 选择正确的晶振
-
Communication interface: 通讯接口和引脚选择,包括 CAN, USB, 和 UART 等。
- CAN 接口:
CAN bus speed: 选择合适的 CAN 总线速率- Serial (USART) 接口:
Baud rate for serial port: 选择合适的波特率,默认 250000。注意,由于 UART 通讯没有 CLK 时钟,所以波特率要保证一致。- USB 接口:
USB ids: 可以自定义 USB Vendor ID, Product ID, 建议保持默认。Serial Number 可以设置为好记的名字比如 katapult ,要求和 klipper 固件的名称不同,代表进入 BootLoader.
-
Application start offset: Katapult 占用空间大小,注意 <u>后面编译 Klipper 固件 时和此处保持一致</u>。
-
Support bootloader entry on rapid double click of reset button: 启用时,<u>运行 Klipper 状态下</u>快速按两下 reset 按钮 (500ms内) 可以进入 BootLoader,初始没有烧录固件时也会进入 BootLoader。
-
Enable bootloader entry on button (or gpio) state: 启用时,使用自定义 GPIO 引脚进入 BootLoader。
Button GPIO Pin: 设置 GPIO 引脚
-
Enable Status Led: 启用时,指定 LED 显示状态,进入 BootLoader 时指定 LED 灯慢闪。<u>建议 UART 和 CANBus 模式启用</u>,因为无法像 USB 那样看到 Katapult 名称确认进入 BootLoader。
-
Status LED GPIO Pin: LED 状态灯引脚,如 PC13,部分需要反转 low 时亮灯,此时填写 !PC13.
烧录 Katapult 覆盖原引导
由于我们要安装 Katapult,来覆盖掉原来的bl,所以起始地址为 0x08000000 。不同烧录方式如下:
# 3.3v serial | PA9-TX, PA10-RX
sudo stm32flash -w /home/pi/katapult/out/katapult.bin -v -g 0 /dev/serial/by-id/usb-Silicon_Labs_CP2102_USB_to_UART_Bridge_Controller_0001-if00-port0
# USB DFU
sudo dfu-util -a 0 -d 0483:df11 --dfuse-address 0x08000000 -D /home/pi/katapult/out/katapult.bin
2.2 烧录 Klipper 固件
使用 klipper 或者 kiauh-Advanced-Build Only 编译主板固件,注意选择正确的晶振和 BootLoader offset。
2.2.1 USB 及物理 UART 设备
进入 Katapult BootLoader 后(方法见上)
~/klippy-env/bin/python flashtool.py -d 串口设备地址 -b 波特率 -f 固件地址
注意:
- 串口设备地址必填
- 波特率默认
250000,需要和编译 Katapult 时保持一致
- 固件地址默认
klipper.bin ,可以指定其他地址或其他固件
2.2.3 CAN 设备
这里可以参考 mellow/fly3d 的文档 ,不再赘述。首次烧录还是需要 USB DFU 等方法。
# 查询 CAN 节点 UUID
~/klippy-env/bin/python ~/katapult/scripts/flashtool.py -i can0 -q
# 烧录 Klipper 固件
~/klippy-env/bin/python ~/katapult/scripts/flashtool.py -i can0 -f ~/klipper/out/klipper.bin -u <uuid>
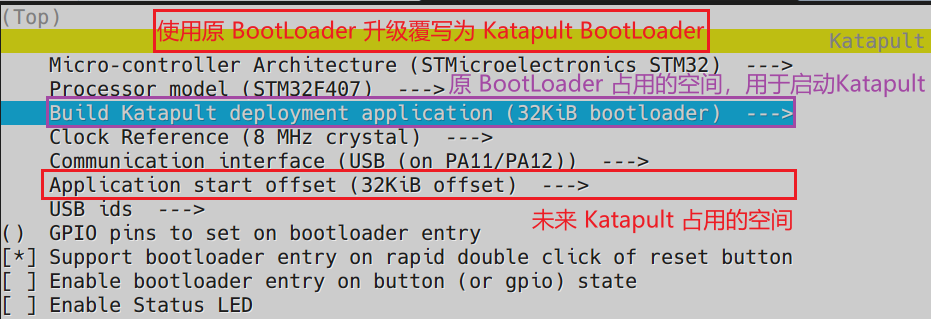
3、【番外】使用原主板 BootLoader 烧录 Katapult
这种方式实际就是编译生成一个程序 deployer.bin,原来的引导启动 deployer,之后它会覆盖原来的引导。所以要求编译时它的Bootloader Offset 和原来的引导相一致,才能被启动。第二处 offset 则代表 deployer(kataplut) 覆盖原来的引导后所占用的空间,这个和之后编译 klipper 的 offset 一致,有点绕,对照最初的图就好理解了。
建议首先使用 SWD 编程器/串口模块/ DFU 等方式烧录 Katapult,如果没有的话,再考虑使用原来的 BootLoader 运行 Katapult 并覆盖原有的引导,这种方式要保证编译选项正确,否则无法启动。这种方式就是上面说的 Build Kata
pult deployment application,建议有条件先备份原引导,或者看看官方有无备份(当然没有其实对于老手来说也没关系)。
这种可以用 SD 卡、HID-BootLoader、或者旧版本 Katapult 进行升级。
# 使用旧版 Katapult 升级,使用上面生成的 deployer.bin,启动后覆盖原引导
~/klippy-env/bin/python ~/katapult/scripts/flashtool.py -d /dev/serial/by-id/usb-katapult_stm32f407xx_katapult-if00 -f ~/katapult/out/deployer.bin
4、从 Klipper 进入 Katapult
参看 Klipper 官方文档:Bootloader Entry
安装 Kataput 后,目前为止仍然需要手动按 reset 键两次进入 Katapult BootLoader 才能烧录固件,如果想要实现<u>无需额外按键升级 Klipper</u> (上面所说的无接触线刷),可以发送命令让主板上的 Klipper 程序进入 Katapult BootLoader 状态。分述如下:
4.1 USB:
cd ~/klipper/scripts
~/klippy-env/bin/python -c 'import flash_usb as u; u.enter_bootloader("/dev/serial/by-id/usb-Klipper_stm32f407xx_mks-monster8-if00")'
# 如果成功会返回:Entering bootloader on <DEVICE>
# 注意 /dev/serial/by-id/usb-Klipper_stm32f407xx_mks-monster8-if00 改成你的串口设备号
4.2 Serial:
以下部分为官方文档,实际有问题,原因是我们编译的固件采用 250000 波特率,stty 不支持此非标准波特率,所以需要进行修改。
# 注意第一行不适用我们的场景
stty 115200 < /dev/serial/by-id/usb-Klipper_stm32f407xx_mks-monster8-if00
echo $'~ \x1c Request Serial Bootloader!! ~' >> /dev/serial/by-id/usb-Klipper_stm32f407xx_mks-monster8-if00
设置非标准波特率
创建 mysetbaud.py,来源:https://unix.stackexchange.com/questions/327188/how-to-monitor-a-serial-connection-250000-baud
#!/usr/bin/python
# set nonstandard baudrate. http://unix.stackexchange.com/a/327366/119298
import sys,array,fcntl
# from /usr/lib/python2.7/site-packages/serial/serialposix.py
# /usr/include/asm-generic/termbits.h for struct termios2
# [2]c_cflag [9]c_ispeed [10]c_ospeed
def set_special_baudrate(fd, baudrate):
TCGETS2 = 0x802C542A
TCSETS2 = 0x402C542B
BOTHER = 0o010000
CBAUD = 0o010017
buf = array.array('i', [0] * 64) # is 44 really
fcntl.ioctl(fd, TCGETS2, buf)
buf[2] &= ~CBAUD
buf[2] |= BOTHER
buf[9] = buf[10] = baudrate
assert(fcntl.ioctl(fd, TCSETS2, buf)==0)
fcntl.ioctl(fd, TCGETS2, buf)
if buf[9]!=baudrate or buf[10]!=baudrate:
print("failed. speed is %d %d" % (buf[9],buf[10]))
sys.exit(1)
set_special_baudrate(0, int(sys.argv[1]))
最终脚本
# 设置串口波特率 250000
python3 ./mysetbaud.py <> /dev/serial/by-id/usb-Silicon_Labs_CP2102_USB_to_UART_Bridge_Controller_0001-if00-port0 250000
# 重启下位机进入 Katapult
echo $'~ \x1c Request Serial Bootloader!! ~' >> /dev/serial/by-id/usb-Klipper_stm32f407xx_mks-monster8-if00
4.3 CAN:
# 使 CAN 板从运行 Klipper 状态进入 Katapult
~/klippy-env/bin/python ~/katapult/scripts/flashtool.py -i can0 -u <uuid> -r
5、实战 MKS Robin Nano(UART)
之前的 Robin 主板送人了,Gokit2 为例。
# make serialflash FLASH_DEVICE=/dev/serial/by-id/usb-Klipper_stm32f407xx_swd-if00
# 编译 deploy.bin
# 使用 SD 卡烧录,注意改名才会被原 Bootloader 识别
# 按reset2进入Katapult,烧录Klipper固件
6、使用树莓派 Debug Probe + OpenOCD 烧录固件
之所以要这样,原因在于我的 MKS Monster8 v1 主板早期被我刷了 HID-Bootloader 方便线刷,现在进不去 HID,同时 DFU 和 3.3v serial (PA9/PA10) 也没有反应,只能靠 SWD 接口烧录固件。此种方式最少只需要三根线:SWD、SWC、GND。
过去会用 STM32Z7 开发板板载的 ST-Link,巧在前段时间买了树莓派的 Debug Probe 套件,支持 CMSIS-DAP 和 OpenOCD,想看看可否为其烧录引导和 Klipper 固件。
之前总以为 RP2040 是个玩具不稳定,但是随着代码越来越完善,PIO 的优势就体现出来了,可以做逻辑分析仪、示波器、JTAG调试器啥的。这里的树莓派 Debug Probe 一体化 USB 调试套件买来还没正常用过。
项目主页:debugprobe ,注意有两个固件分支: debugprobe 和 picoprobe,前者适配 DebugProbe 套件,后者使用树莓派 Pico,两者引脚不一样。DProbe 支持 SWD 和 UART 调试功能,使用 CMSIS-DAP 标准,支持 OpenOCD + GDB 调试。
# 安装 OpenOCD 和 GDB,注意 OpenOCD 0.11.0 或 0.12.0 才支持 Debug Probe
sudo apt install openocd gdb-multiarch
# 基本命令
openocd -f <接口配置文件> -f <目标芯片配置文件>
# 烧录 BootLoader,起始地址 0x08000000
sudo openocd -f interface/cmsis-dap.cfg -f target/stm32f4x.cfg -c init -c halt -c "flash write_image erase /home/pi/katapult/out/katapult.bin 0x08000000" -c reset -c shutdown
# 烧录 Klipper 固件,起始地址和编译 Katapult 时一致,这里以 16KB 为例
sudo openocd -f interface/cmsis-dap.cfg -f target/stm32f4x.cfg -c init -c halt -c "flash write_image erase /home/pi/klipper/out/klipper.bin 0x08004000" -c reset -c shutdown
注意:
-
interface 代表调试器,我们这里选择 cmsis-dap
-
target 代表目标开发板,此处为 monster8 主板,采用 stm32f407 主控芯片,选择 stm32f4x
-
更多支持的调试器和开发板可以从以下目录中找到(find 命令搜索得知):
- /usr/share/openocd/scripts/interface/
- /usr/share/openocd/scripts/target/
-
更多信息可以查看 Windows上使用 OpenOCD 给 STM32 下载程序 以及 OpenOCD 官方文档

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






