本帖最后由 Mr Guo 于 2025-9-28 11:50 编辑
【开源升级】行空板定格动画神器2.0:孩子自导自演3分钟自制动画,创作效率提升300%!时隔三月,这款让5岁娃独立制作动画的神器再次进化!
还记得三个月前我分享的那款「会说话的定格动画相机」吗
定格动画1.0
[size=11.0000pt]那个让5岁孩子能独立完成导演梦的创客项目,在粉丝们的热烈反馈下,我们迎来了2.0升级!
[size=16.0000pt]一、为什么要迭代?粉丝的需求告诉我们答案
[size=11.0000pt]自第一版发布以来我收到了很多宝贵的用户反馈:
- 「Coze云端合成视频等待时间有点长,孩子容易失去耐心」
- 「蓝牙连接每次都要手动,孩子操作不方便」
- 「木制外壳很文艺,但还想要更丰富多元的外观
- 「想要更清晰的教学指导」
这些真实的需求直接推动了2.0版本的升级!今天正式向大家汇报。
[size=16.0000pt]二、2.0核心升级亮点
1、本地视频合成:效率大幅提升告别云端等待,基于OpenCV+FFmpeg的本地视频合成引擎
- # 核心技术升级:智能音乐时长匹配算法
- def create_video_with_music(image_folder, output_path, music_path, fps=24):
- # 自动计算音乐循环或裁剪,确保音画完美同步# 每张照片显示2秒,智能处理背景音乐
效果对比:
- 合成速度:60张照片从10分钟→1分钟完成
- 稳定性:不受网络波动影响,只在生成二维码时需要网络
- 智能匹配:自动计算音乐循环,确保音画完美同步
源码获取见文末
2、蓝牙自动连接:开机即用旧版痛点:每次启动需要手动连接蓝牙音响
2.0解决方案:开机蓝牙自动配对连接
用户体验升级:
- 开机自动连接蓝牙音响
- 断线自动重连,稳定性大幅提升
- 5岁孩子也能独立使用
保姆级教程见文末
3、3D打印外壳:颜值与实用性双升级 [size=10.5000pt]
- 一体化设计:减少拼接缝隙,组装更简单
- 丰富拼色外壳:白绿、灰绿、紫绿多种拼色可选
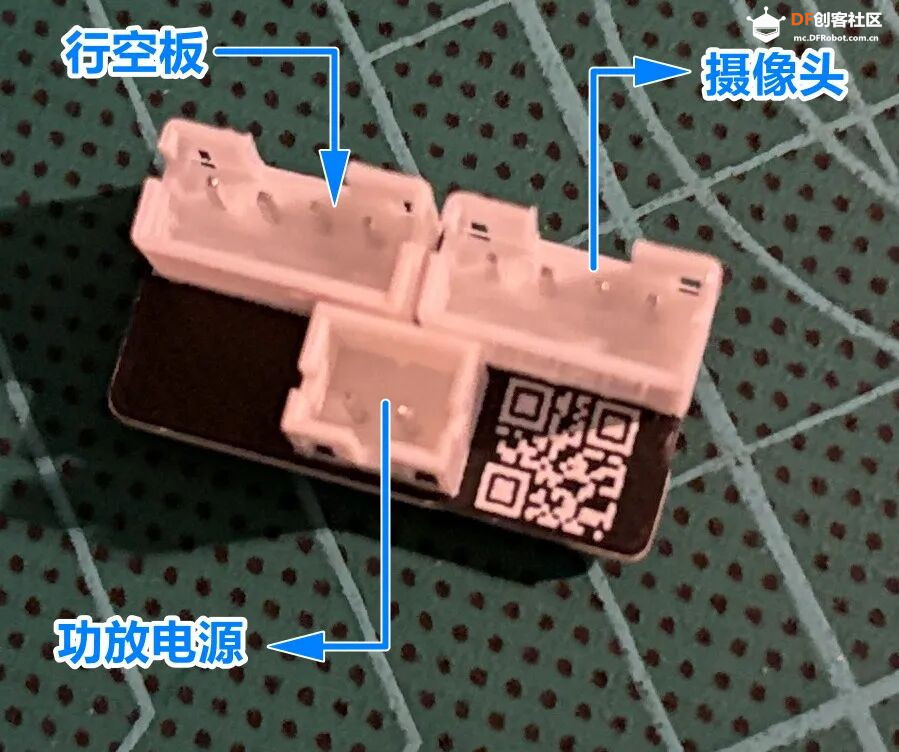
- 接口人性化:插口明确标识,Home键升级为平面按压,相机可平放
- 便携提手:方便挂绳携带
 [size=10.5000pt]
没有3D打印机?海鲜市场搜索“行空板定格动画相机”
4、代码重构:更稳定、更易用
架构升级:
- 模块化设计:从500行单体代码拆分为7个独立模块
- 错误处理完善:程序稳定性大幅提升
- 代码可读性增强:方便二次开发和教学使用
模块结构:- config.py - #统一配置管理
- video_generator.py - #视频生成核心
- camera.py - #相机控制封装
- audio_player.py - #音频播放管理
- coze_api.py - #云服务对接
- utils.py - #通用工具函数
- main.py - #主程序入口
- # 旧版代码(部分)
- def create_video_with_music(image_folder, output_path, music_path, fps=24):
- # 近100行的复杂函数
- # 混合了图片处理、音频处理、异常处理等多项功能
-
- # 新版代码
- class VideoGenerator:
- def create_video(self, image_folder, output_path, music_path):
- # 清晰的职责划分
- images = self._get_sorted_images(image_folder)
- self._create_silent_video(image_folder, temp_path, video_duration)
- self._add_audio(temp_path, music_path, output_path, video_duration)
文末附重构后的全部源码
[size=18.6667px]5、软件功能增强
[size=11.0000pt]音乐匹配推荐::
- 自然风光 → 轻音乐伴奏
- 人物动画 → 欢快节奏
- 建筑场景 → 电子音乐
- 节日主题 → 喜庆旋律
- 云端协作:一键生成二维码,轻松分享,扫码即可观看作品
 [size=10.5000pt]
1、将拨动开关和AB按键装入壳体中
[size=14.6667px]2、将行空板+电源扩展板组装好后装入壳体,这里和1.0版本不同,只用到电源扩展板,体积也缩小了三分之一
[size=14.6667px]3、然后将蓝牙功放装入壳体,可借用电源扩展板中的一颗螺丝固定
 [size=10.5000pt]
 [size=10.5000pt]
[size=14.6667px]6、连接线路,将盖板与壳体组合
 [size=10.5000pt]
[size=21.3333px]四、开机自动连接蓝牙教程
1、配对蓝牙设备
基础概念
[size=11.0000pt]1、 什么是 Bash?
Bash 就像是和行空板"对话"的语言翻译官。在黑色窗口中输入英文命令,Bash 会翻译给行空板听,然后行空板执行您的指令。
在终端看到的 pi@行空板:~ $ 就是 Bash 的提示符,表示它准备好了接收命令
只需要在 $ 符号后面输入命令即可(不需要输入 $ 本身
[size=14.6667px]2、什么是 Nano 编辑器?
[size=11.0000pt]Nano 是一个简单的文本编辑器,就像Windows的记事本一样,但是在命令行中使用的。我们会用它来创建和修改脚本文件。
步骤1:打开终端(命令行窗口)行空板连接Mind+,选择Python模式,找到"终端"或"Terminal"程序并打开它
 [size=10.5000pt]
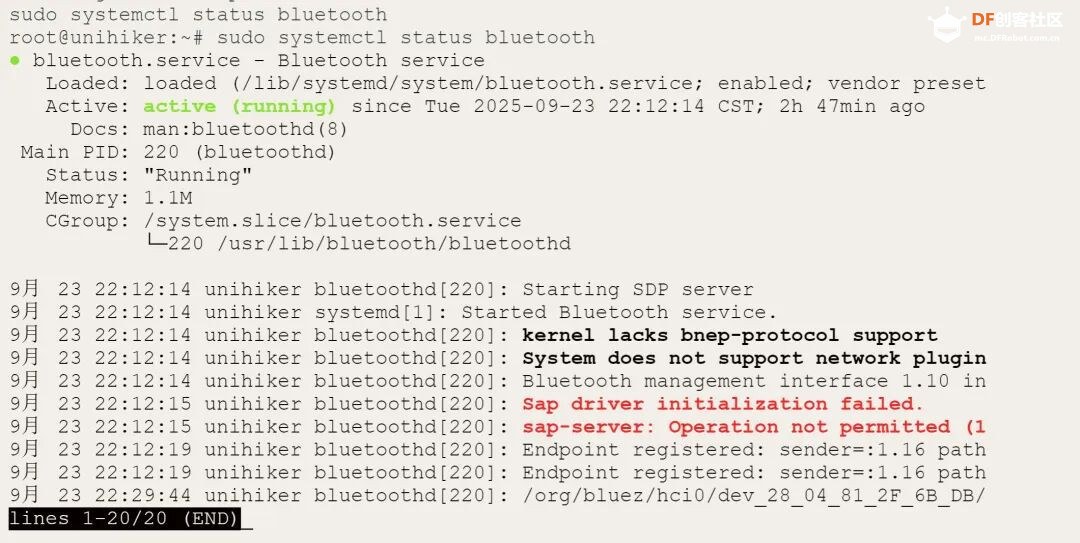
- sudo systemctl status bluetooth
如果看到绿色的"active (running)"状态,说明蓝牙服务正常,如下图
 [size=10.5000pt]
复制代码
现在会看到提示符变成了 [bluetooth]#,表示进入了蓝牙控制模式。
输入以下命令并按 Enter:
复制代码
等待约10-20秒,会看到类似这样的信息:
- [NEW] Device 11:22:33:44:55:66 My_Bluetooth_Speaker
找到你的设备名称和MAC地址(那串由冒号分隔的数字字母组合,如 11:22:33:44:55:66),把它记下来。
输入以下命令停止扫描(按 Enter):
复制代码
现在配对你的设备(将下面的MAC地址替换成刚才记下的):
复制代码
提示:如果出现"AlreadyExists"错误,说明设备已配对过,直接进行信任设置即可。
输入以下命令(替换为你设备的MAC地址):
复制代码
最后退出蓝牙控制模式
复制代码
现在回到了普通的命令提示符 pi@行空板:~ $。
2、创建自动连接脚本创建连接脚本文件:输入以下命令创建脚本文件:
- sudo nano /usr/local/bin/bt-autoconnect.sh
Nano 编辑器使用指南现在您进入了Nano编辑器,界面底部有一些快捷键提示:
- Ctrl+O = 保存文件 (Write Out)
- Ctrl+X = 退出编辑器 (Exit)
- Ctrl+K = 删除一行
- Ctrl+U = 粘贴
脚本内容如下(记得替换MAC地址): - #!/bin/bash
-
- # 蓝牙设备MAC地址(必须替换为您的设备地址)
- DEVICE="28:04:81:2F:6B:DB"
-
- # 最大重试次数
- MAX_RETRY=8
- RETRY_INTERVAL=5
-
- # 等待蓝牙服务完全启动
- sleep 15
-
- # 尝试连接
- for i in $(seq 1 $MAX_RETRY); do
- echo"尝试第 $i 次连接..."
-
- # 尝试连接设备
- ifecho -e "connect $DEVICE\nexit" | bluetoothctl | grep -q "Connection successful"; then
- echo"✅ 成功连接到设备 $DEVICE"
- exit 0
- fi
-
- echo"⚠️ 第 $i 次连接尝试失败,$RETRY_INTERVAL 秒后重试..."
- sleep$RETRY_INTERVAL
- done
-
- echo"❌ 错误: 无法连接到设备 $DEVICE"
- exit 1
保存并退出Nano- 按 Ctrl+O (按住Ctrl键不放,再按O键)
- 按 Enter 键确认文件名
- 按 Ctrl+X 退出编辑器
 [size=10.5000pt] 现在回到了命令行界面。 给脚本添加执行权限- sudo chmod +x /usr/local/bin/bt-autoconnect.sh
3、测试脚本让我们测试一下脚本是否正常工作: - sudo /usr/local/bin/bt-autoconnect.sh
如果看到"成功连接到设备"的消息,说明脚本工作正常!如果行空板在测试之前已经与蓝牙设备连接,可能会看到看到“尝试连接失败”,这个不要紧,先忽略。 4、设置开机自动启动创建服务文件输入以下命令: - sudo nano /etc/systemd/system/bt-autoconnect.service
输入服务配置内容在Nano编辑器中输入以下内容: - [Unit]
- Description=Auto Connect Bluetooth Device
- After=bluetooth.service
- Requires=bluetooth.service
-
- [Service]
- Type=simple
- ExecStart=/usr/local/bin/bt-autoconnect.sh
-
- [Install]
- WantedBy=multi-user.target
保存并退出- 按 Ctrl+O → Enter → Ctrl+X
启用服务依次输入以下命令: - # 重新加载系统服务配置
- sudo systemctl daemon-reload
-
- # 启用开机自启动
- sudo systemctl enable bt-autoconnect.service
-
- # 立即启动服务
- sudo systemctl start bt-autoconnect.service
-
- # 检查服务状态
- systemctl status bt-autoconnect.service
5、最终测试检查服务状态输入以下命令查看服务是否正常运行: - systemctl status bt-autoconnect.service
如果看到绿色的"active (running)",说明一切正常! 重启测试现在让我们重启行空板来测试是否真的能自动连接: 复制代码
等待2分钟后,重新终端,然后输入以下命令检查蓝牙连接状态:
- echo -e "info XX:XX:XX:XX:XX:XX\nexit" | bluetoothctl | grep "Connected"
请记得将上面的MAC地址替换为设备的实际地址。 如果显示 Connected: yes,恭喜!配置成功了! 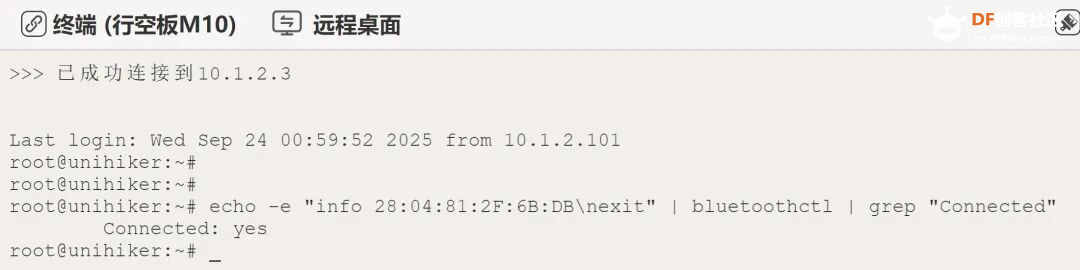 [size=10.5000pt] 背景说明 虽然我们已经实现了开机自动连接,但在长时间使用过程中,蓝牙连接可能会因信号干扰、设备省电模式等原因意外断开。本节将配置系统级的自动重连功能,让连接更加稳定可靠。 步骤1:编辑蓝牙主配置文件在终端中输入以下命令: - sudo nano /etc/bluetooth/main.conf
[size=11.0000pt]步骤2:配置重连策略使用键盘方向键找到 [Policy] 部分(通常在文件末尾),添加或修改以下配置:
[size=11.0000pt]- [Policy]
- # 启用自动重连功能
- AutoEnable=true
- # 设置最大重连尝试次数(建议5-7次)
- ReconnectAttempts=7
- # 设置重连间隔(采用智能退避策略)
- ReconnectIntervals=1,2,4,8,16,32,64
步骤3:保存并重启蓝牙服务保存文件: - 按 Ctrl+O → Enter → Ctrl+X
重启蓝牙服务使配置生效: - sudo systemctl restart bluetooth
步骤4:验证配置效果- # 先断开当前连接
- echo -e "disconnect XX:XX:XX:XX:XX:XX\nexit" | bluetoothctl
-
- # 等待几秒,观察是否自动重连
- echo -e "info XX:XX:XX:XX:XX:XX\nexit" | bluetoothctl | grep "Connected"
7、应用场景- 1. 智能音箱项目:开机自动连接蓝牙音箱播放音频
- 2. 机器人控制:自动连接蓝牙手柄或遥控器
- 3. 物联网网关:与蓝牙传感器建立稳定连接
- 4. 教育场景:简化课堂设备连接流程
通过本教程,你已成功实现了行空板开机自动连接蓝牙的功能。这个方案不仅适用于行空板,也适用于其他基于Linux系统的开发板。 五、开源创作资料获取三种获取方式:- 1. 已有行空板仅打印外壳:Makerworld搜索"行空板定格动画"
 [size=10.5000pt] - 2. 购买多色外壳:可在海鲜市场搜索"行空板定格动画相机“来购买外壳
[size=11.0000pt][size=11.0000pt]注意代码中关于调用Coze的令牌和ID要自行更换,涉及到相关的库可在Mind+终端安装
六、写在最后从1.0到2.0,我砍掉了复杂的云端依赖,强化了本地能力, 这次迭代让我深刻体会到: 「好的创客项目不是技术的堆砌,而是用户体验的持续优化」 这一切离不开用户的真实反馈,这里要特别感谢对此项目提出建议的各位朋友。 也有朋友想要更详细的、手把手的教程,不要紧,这个项目我还是会继续迭代,后面尝试更新系列课程,带大家一步一步做一个完整的项目,大家持续关注
造物让生活更美好,我们下期再见! [size=11.0000pt]
 stop_motion_file.zip stop_motion_file.zip
| 




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






