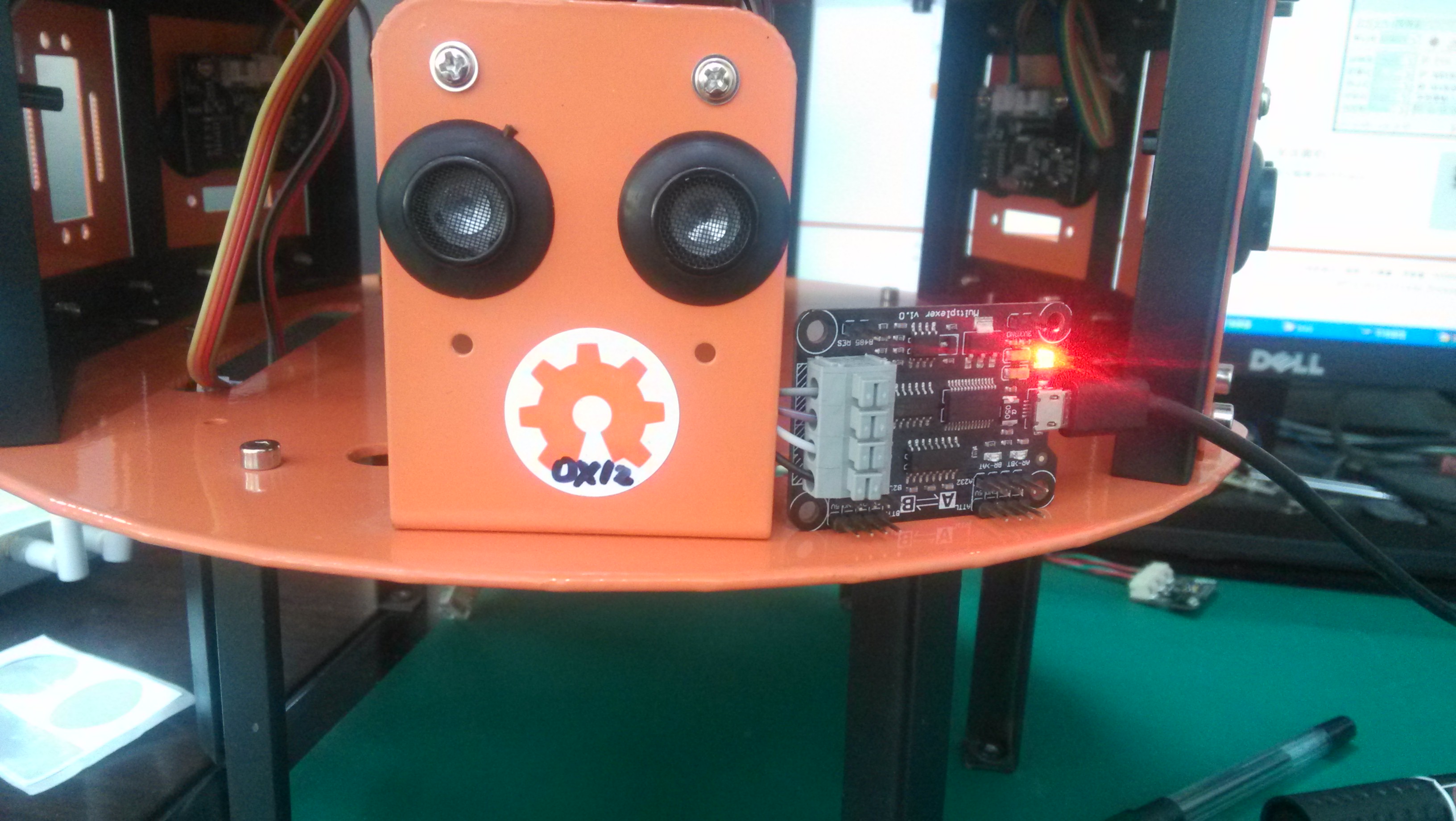
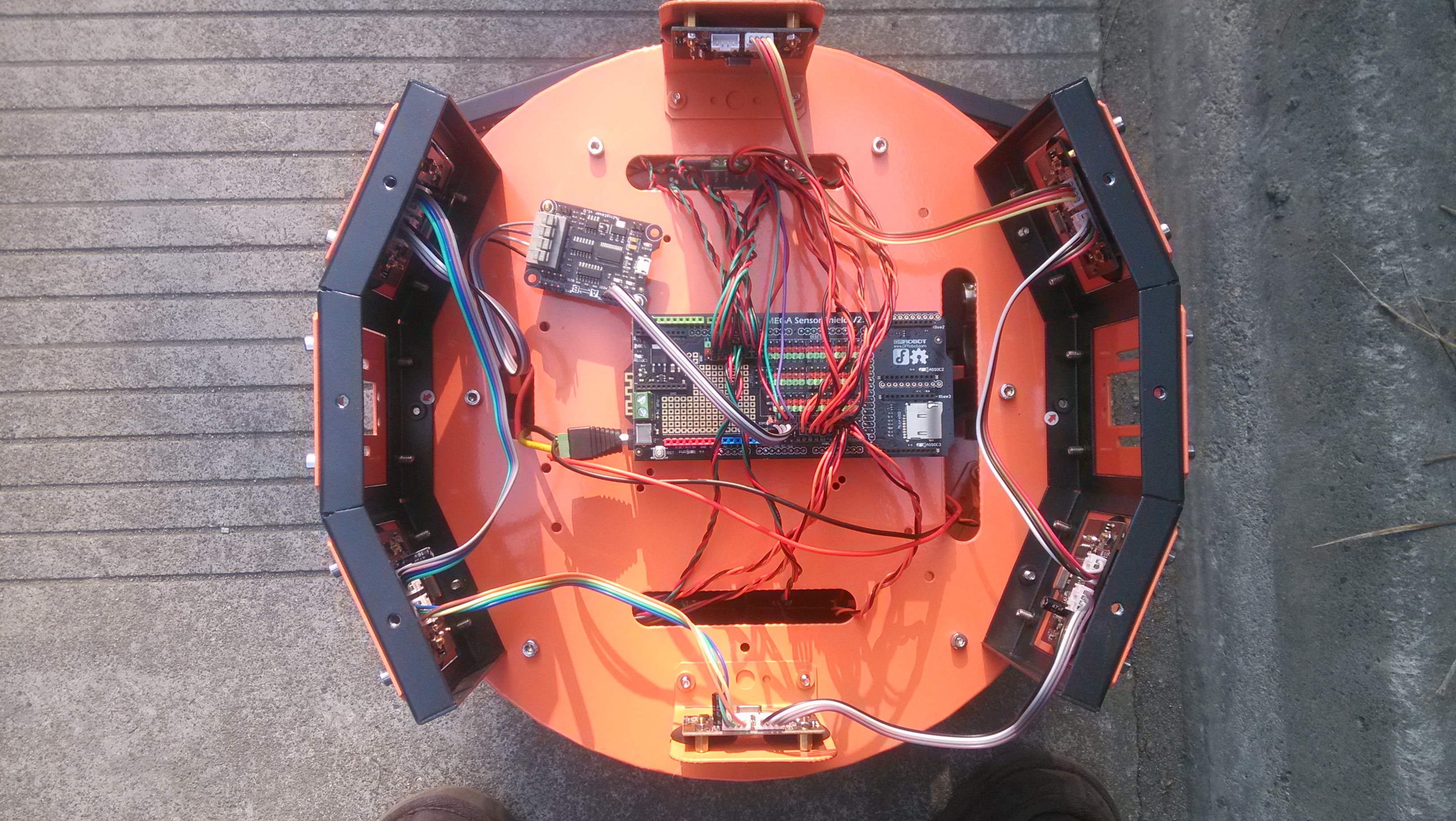
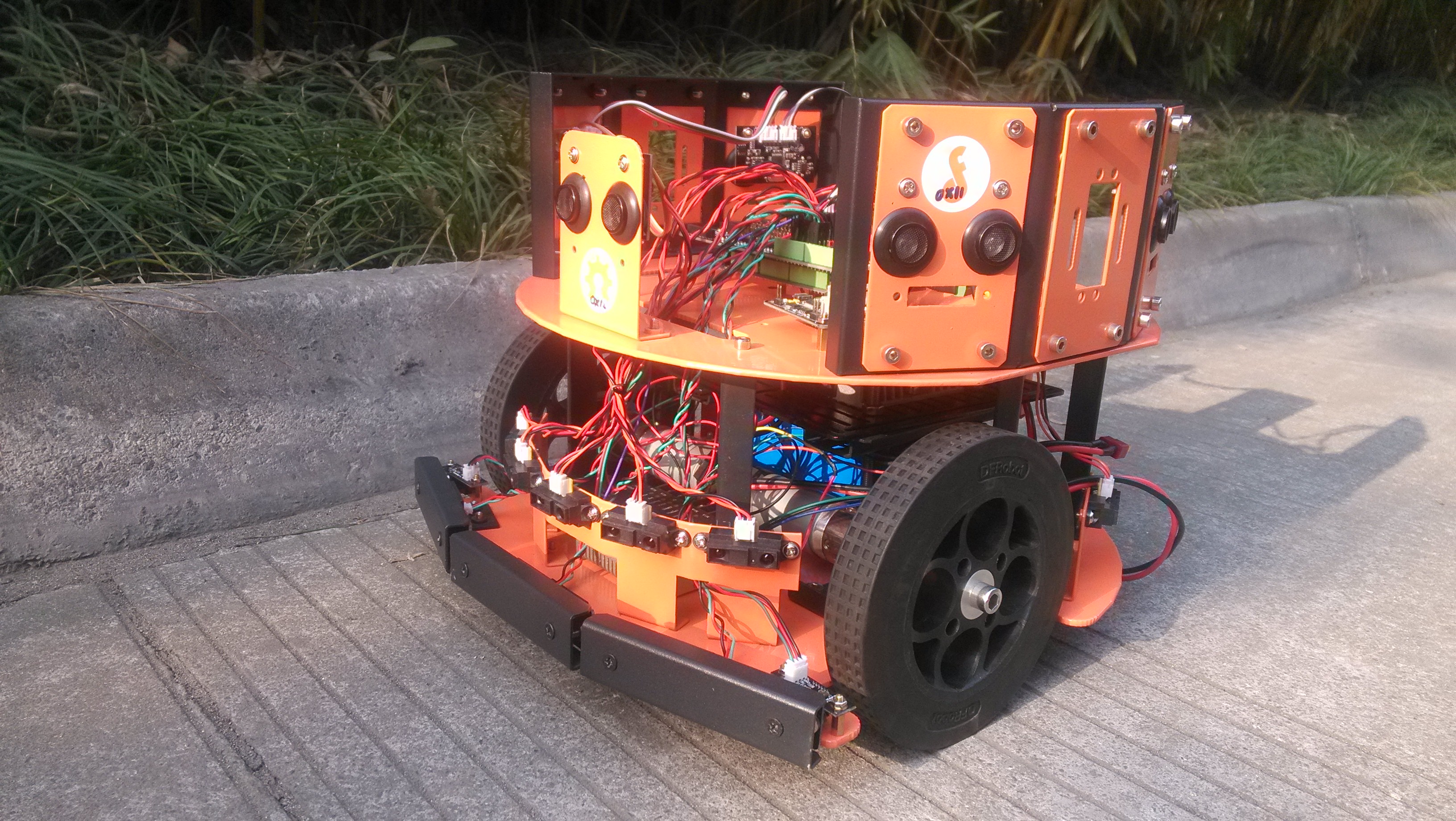
HCR (Home Care Robot)开源家用机器人 平台在各位爱好者和工程师的协助之下迎来了全新一代V2。它一如既往的集成了功能强大、扩展丰富的机械平台。HCR移动机器人套件是一套两轮驱动的三层机器人平台,当然你也可以根据需求调整所使用的部件。套装包含有两个电机,两只轮胎,一只万向轮,以及相关金属板及配套硬件。支撑结构包括伺服机和传感器,此结构上含有专用于mini-itx主板的接口。最近拿到HCR V2版本准备组建一个自己的家用机器人。选择的部件如下: HCR家用机器人开源项目平台 1只 平台包括全部的机械结构及其电机,本身还带了3个碰撞开关Veyron 威龙 双路12A直流有刷电机驱动器 1只 带PID自整定的闭环电机控制及其驱动器,用了这个驱动器,电机方面的控制就不需要写程序了11.1V/12AH大电流锂聚合电池 1只 足够机器人运行半天到一天的DC-DC升降压电源模块 1只 通过这个模块升降压到 12V提供给 Bluno Mega1280控制器及其PC供电,模块不管电池电压超过12V或者低于12V都可以稳压GP2Y0A21 距离传感器 8只 负责低矮物体的检测,探测距离:10-80cm数字防跌落传感器 4只 楼梯等的跌落检测URM04 V2.0超声波测距模块 6只 检测更远距离的障碍物,使用RS485总线连接使用比较方便,探测距离:4-500cmUSB/RS232/RS485/TTL 协议转换器 1只 使用这个模块将主板TTL电平串口转换为RS485接口 连接URM04超声波传感器Bluno Mega1280控制器 1只 内带蓝牙无线下载和通信功能的Arduoino Mega主板,通过无线方式 脱离了USB电缆的束缚。下载程序和通信都比较方便MEGA传感器扩展板 V2.4 1只 扩展板将Bluno Mega1280控制器的接口全部引出为3PIN的排针,这样传感器就可以直接插上去USB BLE-LINK V1.0 Bluno无线下载适配器 1只 插在电脑主机上,建立和Bluno Mega1280控制器的无线连接,完成下载程序和无线通信DC2.1电源转接头 公头 1只 用于将12V电源线连接到 Bluno Mega1280控制器装配好底层结构后对电池和电机驱动器进行安装 USB/RS232/RS485/TTL 协议转换器 连接电脑和Veyron 威龙 双路12A直流有刷电机驱动器 进行初步的设置。12V 直流减速电机146rpm 带编码器 。他的减速比是51:1,编码器线数是 13.Veyron 电机驱动器快速上手 1,EEPSAV回车换行 保存设置的值 (注意一定要保存,否则断电或者重启就没有了) Veyron 电机驱动器快速上手 装配HCR第二层结构安装控制板和超声波,并对超声波进行设置 USB/RS232/RS485/TTL 协议转换器 逐个对6个URM04超声波进行设置,波特率19200BPS此时RS485总线只能接一个超声波,便于设置地址。USB/RS232/RS485/TTL 协议转换器 将RS485转换为TTL连接到 Bluno Mega1280控制器 的Serial2串口Veyron 威龙 双路12A直流有刷电机驱动器 连接到 Bluno Mega1280控制器 的Serial3串口例子代码 Arduino操作系统 -ProtoThreads 这样可以专注设计各个进程,减小了各个程序之间的影响。#include <pt.h> //ProtoThreads必须包含的头文件
#include <TimerOne.h> //使用定时器0来做时间片的定时
//---------------------跌落和碰撞传感器定义---------------------------------------------------
#define dropIsrFL 2 //D2跌落传感器前左,机器人离地距离大于厘米输出高电平
#define dropIsrFR 3 //D3跌落传感器前右,机器人离地距离大于厘米输出高电平
#define dropIsrBL 4 //D4跌落传感器后左,机器人离地距离大于厘米输出高电平
#define dropIsrBR 5 //D5跌落传感器后右,机器人离地距离大于厘米输出高电平
#define crashIsrFL 6 //D6碰撞传感器左,机器人碰撞输出地电平
#define crashIsrFM 7 //前中间碰撞传感器 接7口
#define crashIsrFR 8 //D8碰撞传感器右,机器人碰撞输出地电平
//---------------------红外传感器定义---------------------------------------------------------
#define infraredDistanceF1 A6 //HCR机器人 前端从左到右第1只 GP2YOA21红外测距传感器
#define infraredDistanceF2 A7 //第2只 GP2YOA21红外测距传感器
#define infraredDistanceF3 A8
#define infraredDistanceF4 A9
#define infraredDistanceF5 A10
#define infraredDistanceB1 A11 //HCR机器人后端从左到右第1只 GP2YOA21红外测距传感器
#define infraredDistanceB2 A12
#define infraredDistanceB3 A13
static int timer50msCounter1; //timer50msCounter为定时计数器
static int timer50msCounter2;
static int timer50msCounter3;
static int timer50msCounter4;
static int timer50msCounter5;
static int state1=0; //state为灯的状态
boolean abortStatus = false;
#define dropFlgeFL 0b00000001 //跌落传感器前左 状态字 1 : 传感器动作
#define dropFlgeFR 0b00000010 //跌落传感器前右 状态字 1: 传感器动作
#define dropFlgeBL 0b00000100 //跌落传感器后左 状态字 1: 传感器动作
#define dropFlgeBR 0b00001000 //跌落传感器后右 状态字 1: 传感器动作
#define crashFlgeFL 0b00010000 //碰撞传感器左 状态字 1: 传感器动作
#define crashFlgeFM 0b00100000 //碰撞传感器中 状态字 1: 传感器动作
#define crashFlgeFR 0b01000000 //碰撞传感器右 状态字 1: 传感器动作
byte crashDropSensorStatus = 0; //定义碰撞和跌落传感器状态字,每bit代表一个传感器状态 1代表触发
byte infraredRange[8]; //8个红外传感器测距结果,单位 厘米
int batteryVoltage; //电源电压 123代表 12.3V
long EncoderCount1 = 0; //编码器计数 范围为:-2147483648~2147483647
long EncoderCount2 = 0;
unsigned int ultrasonicDistance[6]; //6个超声波测量距离值,1-500厘米
int M1Speed = 0; //电机1速度-164 到 164, -164反转最大速度, 0 电机停止,164正转最大速度
int M2Speed = 0; //电机2速度-164 到 164
#define VOLTAGE_OUT 1 //电压输出
#define ENCODER_OUT 1 //编码器信息
#define IR_OUT //红外传感器数据输出
#define U_OUT 1 //超声波输出使能
static struct pt pt1, pt2,pt3,pt4,pt5;
/*--------------------------------------------------------------------------------------------
函数说明: 底层跌落,碰撞,红外,超声波传感器读取
参数说明: 无
返回值 : 无
---------------------------------------------------------------------------------------------*/
void readSensor(void)
{
byte i = 0;
int val = 0;
if(digitalRead(dropIsrFL) == HIGH)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= dropFlgeFL;
}
if(digitalRead(dropIsrFR) == HIGH)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= dropFlgeFR;
}
if(digitalRead(dropIsrBL) == HIGH)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= dropFlgeBL;
}
if(digitalRead(dropIsrBR) == HIGH)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= dropFlgeBR;
}
if(digitalRead(crashIsrFL) == LOW)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= crashFlgeFL;
}
if(digitalRead(crashIsrFM) == LOW)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= crashFlgeFM;
}
if(digitalRead(crashIsrFR) == LOW)
{
abortHandle(); //机器人异常处理程序
crashDropSensorStatus |= crashFlgeFR;
}
for(i = 0;i < 8;i++)
{
val = analogRead(i+6);
val = (6762/(val-9))-4;
infraredRange[i] = (byte)val;
}
#ifdef IR_OUT //输出 红外传感器信息
Serial.print("IR Sensor out:");
for(i=0;i<8;i++)
{
Serial.print(infraredRange[i],DEC);
Serial.print(" ");
}
Serial.println(" ");
#endif
motorGetSystemVoltage(&batteryVoltage); //获取系统电压
#ifdef VOLTAGE_OUT //输出 电压值
Serial.print("Battery Voltage:");
Serial.println(batteryVoltage,DEC);
#endif
motorGetEncoder(&EncoderCount1,&EncoderCount2); //获取编码器累计脉冲数
#ifdef ENCODER_OUT //输出 电压值
Serial.print("Encoder:");
Serial.print(EncoderCount1,DEC);
Serial.print(" ");
Serial.println(EncoderCount2,DEC);
Serial.println(" ");
#endif
}
/*--------------------------------------------------------------------------------------------
函数说明: 跌落\碰撞\红外传感器读取线程,每50ms读取一次
参数说明: *pt - ProtoThreads 操作系统指针
返回值 : 无
---------------------------------------------------------------------------------------------*/
static int ReadSensorThread(struct pt *pt)
{
PT_BEGIN(pt); //线程开始
while(1) //每个线程都不会死
{
PT_WAIT_UNTIL(pt, timer50msCounter1>0); //如果时间满了50毫秒,则继续执行,否则记录运行点,退出线程1
readSensor(); //读取一次传感器
timer50msCounter1 = 0; //计数器置零
}
PT_END(pt); //线程结束
}
/*--------------------------------------------------------------------------------------------
函数说明: 电机控制线程,每500ms发送一次电机控制命令
参数说明: *pt - ProtoThreads 操作系统指针
返回值 : 无
---------------------------------------------------------------------------------------------*/
static int MotoControlThread(struct pt *pt)
{
PT_BEGIN(pt); //线程开始
while(1) //每个线程都不会死
{
PT_WAIT_UNTIL(pt, timer50msCounter2 >= 10); //如果时间满了500毫秒,则继续执行,否则记录运行点,退出线程1
// 测试是否有报警信号,确认是否使能驱动
Serial3.println("1,CER");
motorControl(M1Speed,M2Speed);
timer50msCounter2 = 0; //计数器置零
}
PT_END(pt); //线程结束
}
/*--------------------------------------------------------------------------------------------
函数说明: 线程2,控制灯1
参数说明: *pt - ProtoThreads 操作系统指针
返回值 : 无
---------------------------------------------------------------------------------------------*/
static int LEDBlinkThread(struct pt *pt)
{
PT_BEGIN(pt); //线程开始
while(1)
{ //每个线程都不会死
PT_WAIT_UNTIL(pt, timer50msCounter3 >= 10); //如果时间满了500毫秒,则继续执行,否则记录运行点,退出线程2
timer50msCounter3 = 0; //计数清零
digitalWrite(13,state1);
state1=!state1; //灯状态反转
}
PT_END(pt); //线程结束
}
/*--------------------------------------------------------------------------------------------
函数说明: 电机测试进程
参数说明: *pt - ProtoThreads 操作系统指针
返回值 : 无
---------------------------------------------------------------------------------------------*/
static int MotoTestThread(struct pt *pt)
{
static int i;
PT_BEGIN(pt); //线程开始
while(1)
{
for(i=0;i<164;i++)
{
if(abortStatus == true)
{
timer50msCounter4 = 0; //计数清零delay
PT_WAIT_UNTIL(pt, timer50msCounter4 >= 40); //如果时间满了2000毫秒,则继续执行,否则记录运行点,退出线程
abortStatus = false;
}
M1Speed = i; //设置左右两个电机的速度
M2Speed = i;
motorControl(M1Speed,M2Speed);
timer50msCounter4 = 0; //计数清零
PT_WAIT_UNTIL(pt, timer50msCounter4 >= 1); //如果时间满了50毫秒,则继续执行,否则记录运行点,退出线程
}
for(i=0;i>-164;i--)
{
if(abortStatus == true)
{
timer50msCounter4 = 0; //计数清零
PT_WAIT_UNTIL(pt, timer50msCounter4 >= 40); //如果时间满了2000毫秒,则继续执行,否则记录运行点,退出线程
abortStatus = false;
}
M1Speed = i; //设置左右两个电机的速度
M2Speed = i;
motorControl(M1Speed,M2Speed);
timer50msCounter4 = 0; //计数清零
PT_WAIT_UNTIL(pt, timer50msCounter4 >= 1); //如果时间满了50毫秒,则继续执行,否则记录运行点,退出线程
}
}
PT_END(pt); //线程结束
}
/*--------------------------------------------------------------------------------------------
函数说明: 超声波读取进程,刷新频率5HZ
参数说明: *pt - ProtoThreads 操作系统指针
返回值 : 无
---------------------------------------------------------------------------------------------*/
static int UltrasonicReadThread(struct pt *pt)
{
static byte i;
static byte temp1;
static unsigned int distance;
PT_BEGIN(pt); //线程开始
while(1)
{
for(i=0;i<3;i++)
{
UltrasonicTriggerCommand(0x11+i); //触发URM04超声波及其和他相背对方向的另外一个超声波
UltrasonicTriggerCommand(0x16-i);
timer50msCounter5 = 0; //计数清零
PT_WAIT_UNTIL(pt, timer50msCounter5 >= 1); //如果时间满了50毫秒,则继续执行,否则记录运行点,退出线程
}
for(i=0;i<6;i++)
{
if(UltrasonicReadCommand(0x11+i,&distance))
{
ultrasonicDistance[i] = distance;
}
else ultrasonicDistance[i] = 0xffff;
}
#ifdef U_OUT
Serial.print("Ultrasonic:");
for(i=0;i<6;i++)
{
Serial.print(ultrasonicDistance[i],DEC);
Serial.print(" ");
}
Serial.println(" ");
#endif
}
PT_END(pt); //线程结束
}
/*--------------------------------------------------------------------------------------------
函数说明: 初始化函数
参数说明: 无
返回值 : 无
---------------------------------------------------------------------------------------------*/
void setup()
{
Serial.begin(57600); //COM用于debug
Serial2.begin(19200); //COM2用于读取URM04超声波
Serial3.begin(57600); //COM3用于Veyron电机驱动控制
pinMode(13,OUTPUT);
pinMode(dropIsrFL,INPUT); //D2跌落传感器前左,机器人离地距离大于厘米输出高电平
pinMode(dropIsrFR,INPUT); //D3跌落传感器前右,机器人离地距离大于厘米输出高电平
pinMode(dropIsrBL,INPUT); //D21跌落传感器后左,机器人离地距离大于厘米输出高电平
pinMode(dropIsrBR,INPUT); //D20跌落传感器后右,机器人离地距离大于厘米输出高电平
pinMode(crashIsrFL,INPUT); //D19碰撞传感器左,机器人碰撞输出地电平
pinMode(crashIsrFM,INPUT); //D17碰撞传感器前中,机器人碰撞输出地电平
pinMode(crashIsrFR,INPUT); //D18碰撞传感器右,机器人碰撞输出地电平
Timer1.initialize(50000); //设置定时器每50000微秒,也就是50毫秒钟进入一次中断服务程序
Timer1.attachInterrupt( timer1Isr ); //定义中断后的服务程序
PT_INIT(&pt1); //线程1初始化
PT_INIT(&pt2); //线程2初始化
PT_INIT(&pt3); //线程3初始化
PT_INIT(&pt4); //线程4初始化
PT_INIT(&pt5); //线程5初始化
motorCleanEncoder(1);
motorCleanEncoder(2);
}
/*--------------------------------------------------------------------------------------------
函数说明: 主函数循环
参数说明: 无
返回值 : 无
---------------------------------------------------------------------------------------------*/
void loop () //这就是进行线程调度的地方
{
ReadSensorThread(&pt1); //执行线程1
MotoControlThread(&pt2); //执行线程2
LEDBlinkThread(&pt3); //执行线程3
MotoTestThread(&pt4); //执行线程4
UltrasonicReadThread(&pt5); //执行线程5
}
/*--------------------------------------------------------------------------------------------
函数说明: 机器人异常处理程序
参数说明: 无
返回值 : 无
---------------------------------------------------------------------------------------------*/
void abortHandle()
{
M1Speed = 0; //将左右两个电机的速度降低到0
M2Speed = 0;
motorControl(M1Speed,M2Speed);
abortStatus = true;
} 复制代码 下一个实验:《HCR机器人实验2-ROS系统和HCR Arduino控制板通信》 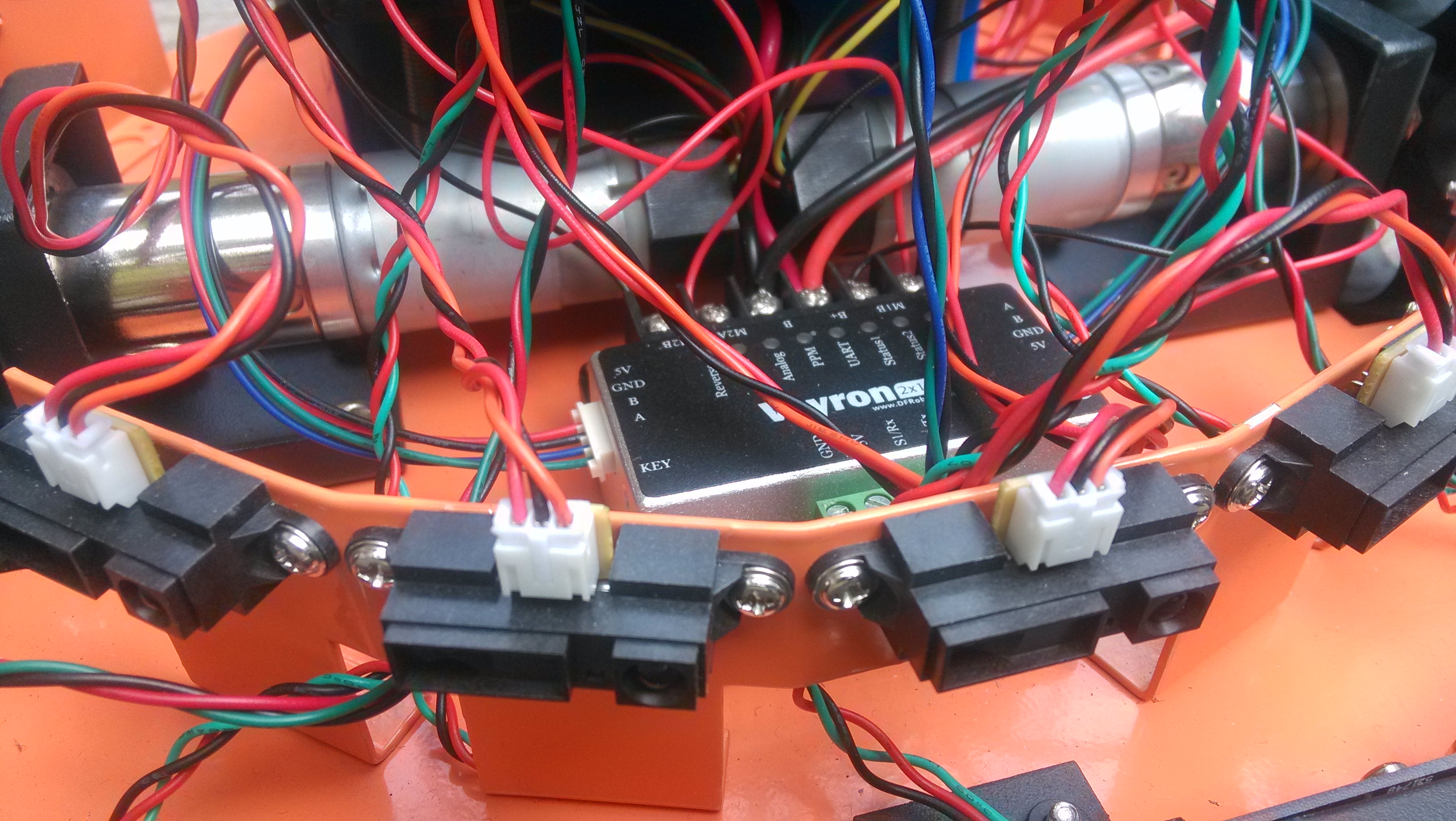

 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







