|
14934| 6
|
[人工智能机器人学导论] 8 通用感知技术 |
|
上一章节:《人工智能机器人学导论》-7 反应式的设计和实现 《人工智能机器人学导论》-8 反应范式机器人的通用感知技术 概述 反应式机器人的行为大部分都是激励-响应形式,这种激励-响应必须要有可靠的感知,因为感知和动作是紧密相联的。机器人必须要有快速刷新的感知硬件和软件。 传感器分为被动传感器和主动传感器。被动传感器依赖环境中的介质进行观测,比如摄像机需要一定的环境光来拍摄图片。主动传感器向环境输出能量,改变或增强环境中的能量,例如声纳传感器发射超声波,接收回波,通过计算声波传输时间进行测距。 逻辑传感器 传感器可以抽象为逻辑传感器(logical sensors),它是能够提供某种特定感知的感知单元或模块。例如通用于壁障的感知是极坐标距离数据。该感知的逻辑传感器可以称为rang_360,返回一个描述了极坐标扫描图的数据结构或对象。逻辑传感器还要列出机器人生成极坐标扫描的所有可能方法,这些方法可能是声纳、激光、立体视觉或纹理。这些模块都是逻辑上等价的,但每种传感器的性能和刷新率不一定相同。 行为传感器融合 它指把多重传感器信息综合为单一感知的处理过程。传感器融合问题的三种基本组合方式:冗余(或竞争)、互补、协同。 有时当单个传感器不精确或噪声太大时,可以使用多个传感器。增加一个传感器就为感知提供了另外一个选择。 如果传感器使机器人以为某个感知是正确的,实际却不是,这种错误就称为假正确(false positive),机器人可以根据该感知做出正确的的辨识,但感知本身是错误的。 如果机器人漏掉感知的错误称为假错误(false negative)。传感器经常会有这两种情况出现。 当多个传感器返回同样的感知时,就认为传感器是冗余的。一个物理的冗余类似在机器人上安装两个声纳环。下部安装的声纳传感器用于检测低矮的物体。  传感器也可以是逻辑冗余的,多个传感器返回相同的感知,但使用了不同的形态或处理算法。例如既有立体摄像机测距又有激光测距传感器测距。有冗余的传感器统称为竞争传感器,因为可以看成是传感器相互竞争以给出获胜的感知。 互补传感器提供不同视角的多个信息,例如搜救机器人使用检测人体的热传感器和摄像机发现的移动相融合以搜寻幸存者。两个传感器都返回生存者的某些信息,但都不能提供完全的信息。协同传感器使用一系列的传感器,经常用于暗示或给出注意的焦点。 大多数传感器融合的眼睛都把它当作是一个需要整体环境模型的慎思式过程来对待。反应式系统最早的机器人只有少量的简单传感器,每个行为对应一个传感器。这种观念使Brooks提出的在行为层面上进行传感器融合的方法成为不可能。传感器融合实际上变成了相同行为的多个实例,其中该行为组合了不同的传感器输入。从大的角度来看,好像机器人内部扮演了一些复杂的处理过程,但实际上他是于发生行为的简单竞争。Brooks把这叫做传感器分裂。 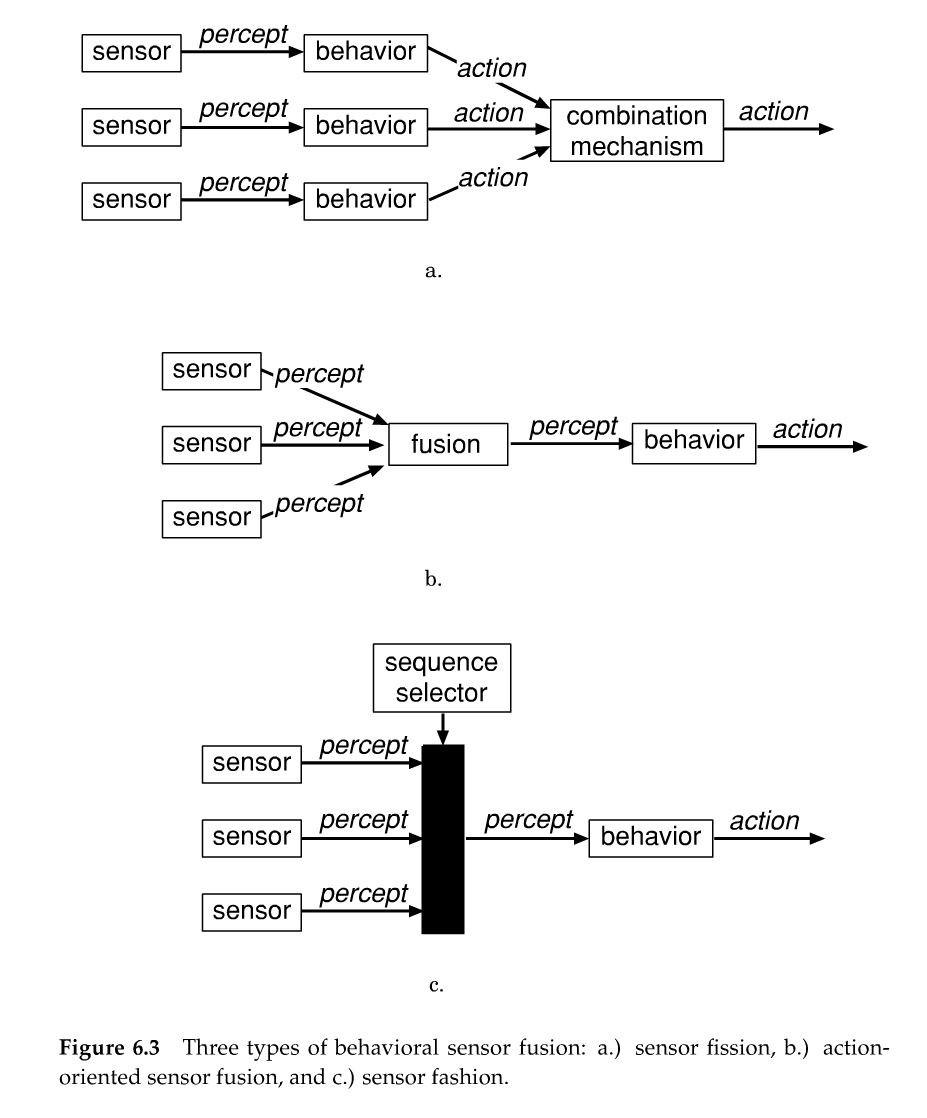 行为传感器融合的三种方式:a)传感器分裂 b)面向对象的传感器融合 c)传感器选置 传感器的属性 为特定机器人装配的一整套传感器称为一个传感器组合(sensor suite)。为了组建传感器组合必须考虑每个传感器的如下属性: 1、视场与感知范围 每个传感器都有它的空间感知覆盖区域。区域的宽度叫做视场FOV(field of view)。视场通常用度来表示。 2、精度、可重复性和分辨率 精度指传感器读取数据的正确性。如果传感器出现一致性的误差,可以通过软件修正。如果误差是随机的,就很难建模。传感器分辨率是指最小增量值。 3、目标范围内的响应性 传感器在某些环境状况下使用时性能会降低。例如在大量玻璃的办公室里导航,声纳传感器的影响就很大。 4、能耗 大部分机器人是通过电池供电,所以能耗是我们必须关注的因素。 5、硬件的可靠性 需要考虑传感器在一些条件下产生的差异,例如电压降低、温度、湿度。 6、尺寸 7、计算复杂度 它是对算法或程序执行运算输的估计,对于小型机器人,处理器速度不高,复杂度是一个需要考虑的问题。 8、解读可靠性 数据理解方面的可靠性。机器人经常无法确定传感器何时给出的信息是不正确的。因此机器人会产生幻觉而做错事。因此传感器数据的处理算法必须是可靠的。 传感器组合的属性 1、简单:硬件和操作原理简明的简单传感器,方便使用 2、模块化: 3、冗余:在军事和工业用途的机器人,希望在部分传感器失效也能够使机器人可靠工作。 机器人如何判断传感器或算法已经失效,需要替换。出现失效问题时继续生存的问题称为容错(fault tolerance)。 内部感知传感器 内部感知就是航位推测,机器人测量源自自身的信号。 1、惯性导航传感器INS(Inertial navigation system)。累计误差小的INS成本高,廉价的INS传感器误差却很大。  DFROBOT的 10自由度惯性导航模块 2、GPS系统,只能在室外使用,精度几米,通过DGPS技术可以让精度达到厘米级别,但是价格太贵。  DFROBOT的 GPS Shield-LEA-6H 接近传感器 1、声纳或超声波测距传感器  URM06 RS485接口超声波测距传感器  URM04 超声波传感器 以上两种传感器 都具备RS485总线,可以方便的组成声纳环。 红外传感器 1、红外开关,只能输出一个开关量,有的传感器这个距离阀值可以调整。传感器基于反射信号强度,所以物体的反光率对测量结果影响很大  3-80cm红外数字壁障传感器 2、红外测距传感器  GP2Y0A21 距离传感器 碰撞和接触传感器 机器人的另外一种感知是触觉,即接触。  碰撞传感器 计算机视觉 如果使用可见光摄像头,则每个像素冒充的时候光的属性值,比如色彩。如果使用的时候热成像仪,则是区域的热值。把信号转换成像素值的函数称为图像函数。 计算机视觉是机器人研究的分支领域,已经取得了许多有用的算法。反应式机器人倾向不使用这些算法。因为运算量太大,无法实时运行。 灰度与色彩表示 图像采集卡通常用8bit表示一个像素的灰度值。因此有256个离散的灰度值,其中0表示黑,255表示白。 彩色的表示有许多方法,用红、绿、蓝来表示。这种格式简称为RGB。 RGB三维立方体 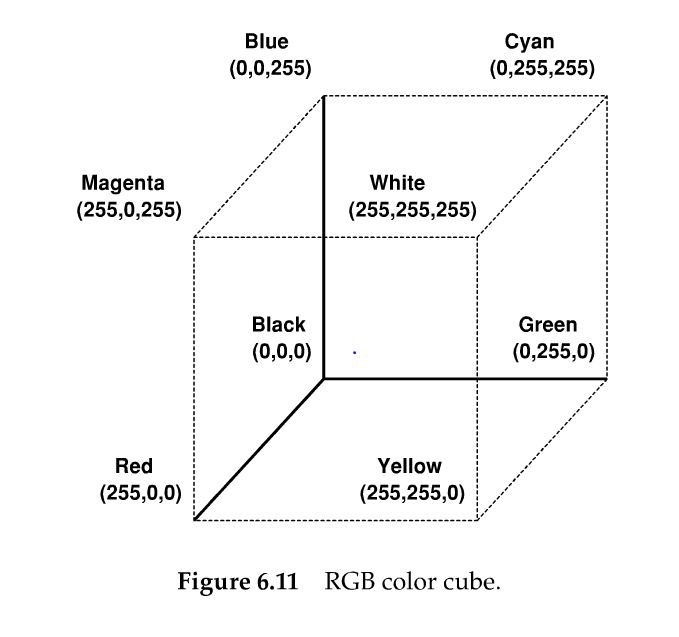 RGB彩色是光源的波长、物体表面对光的影响(表面反射系数)和传感器灵敏度的函数。第一个问题是这些色彩不是绝对的。RGB是基于三个色彩感知原价对反射光的灵敏度得出的。同一个物体在不同的距离时,由于反射光强度不同可能会得出不同的色彩值。如下图a的RGB分割比图b更为正确,是因为图a机器人更靠近检测物体。 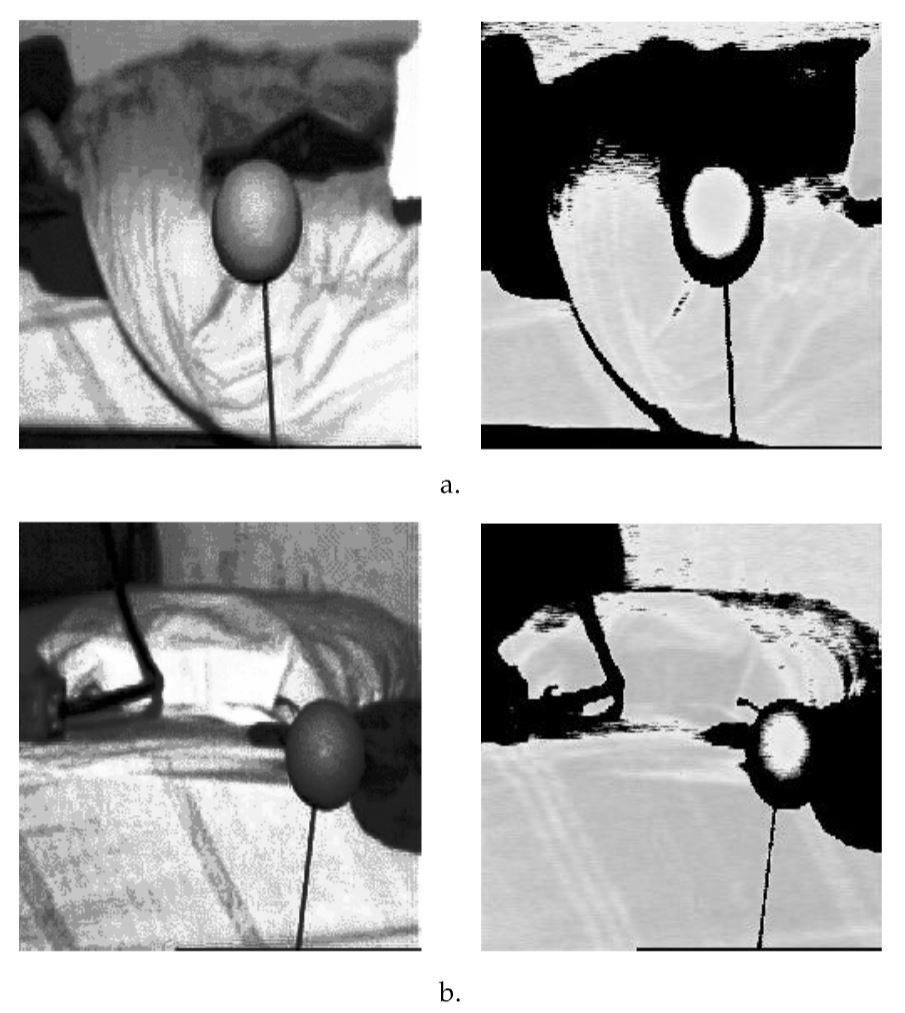 HSV(色调hue、饱和度saturation、亮值value) 色彩空间表示方式: 其中色调是指光的主波长,不会因机器人相对位置或无恶题的形状而变化。饱和度指色彩中白色的缺失度。亮值是对传感器接收到的光的数量的度量。 HSV色彩空间的表示,用0-360度来衡量色调。饱和度和亮值则是0-1之间的实数。 球坐标变换SCT(Spherical、Coordinate、Transform)能将RGB数据转换到一个更接近人眼反应的色彩空间。它更不容易受到光照变换的影响。 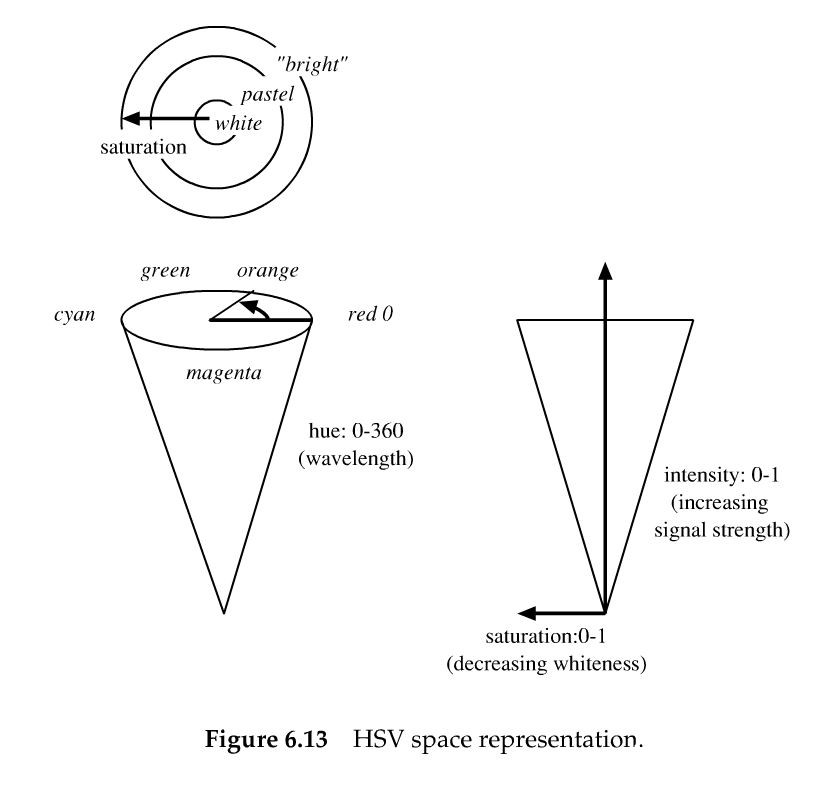 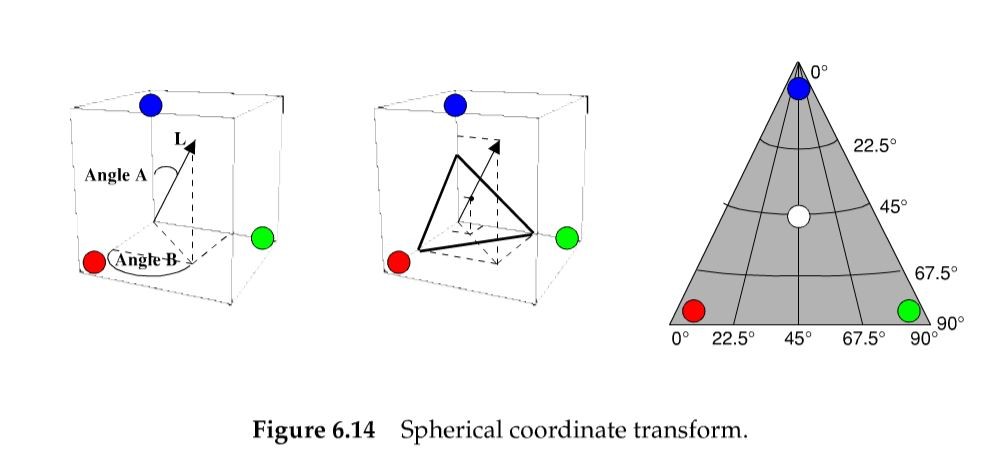 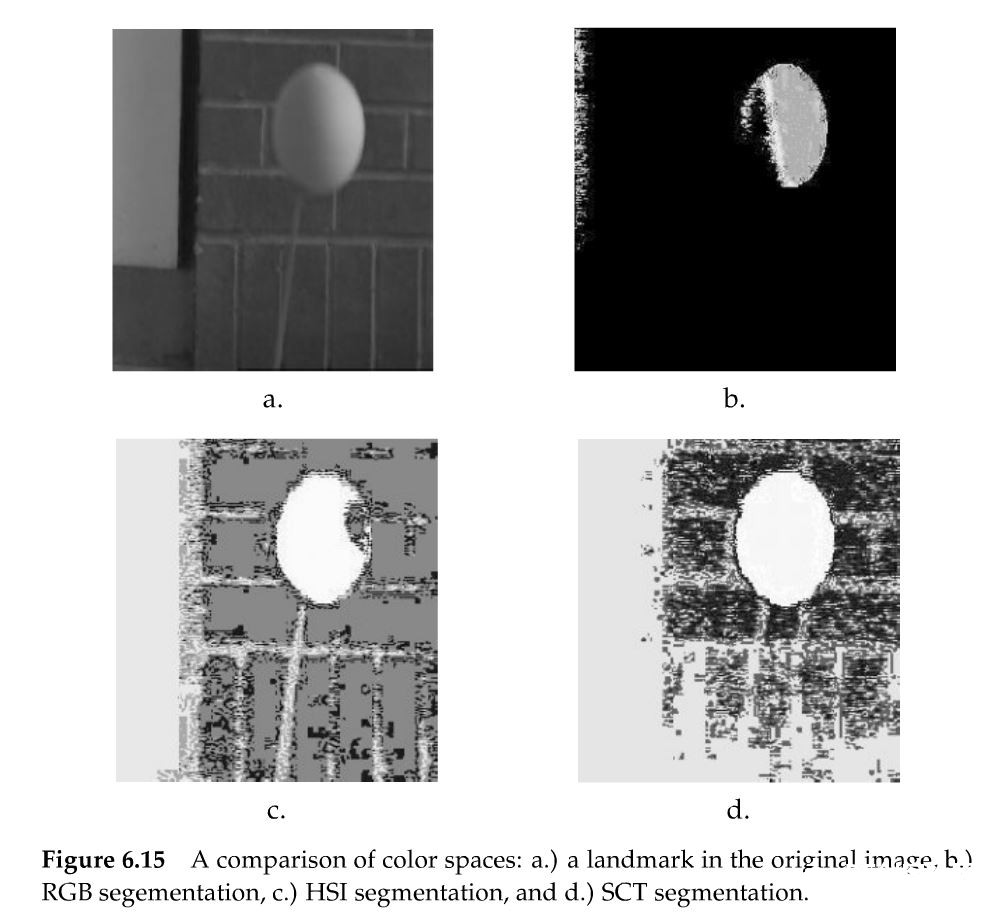 三种色彩空间的比较,最后一个SCT方式很显然色彩分离更好。 彩色直方图化 它是一种在区域中匹配色彩比例的方法。通过这个方法用于辨识物体。 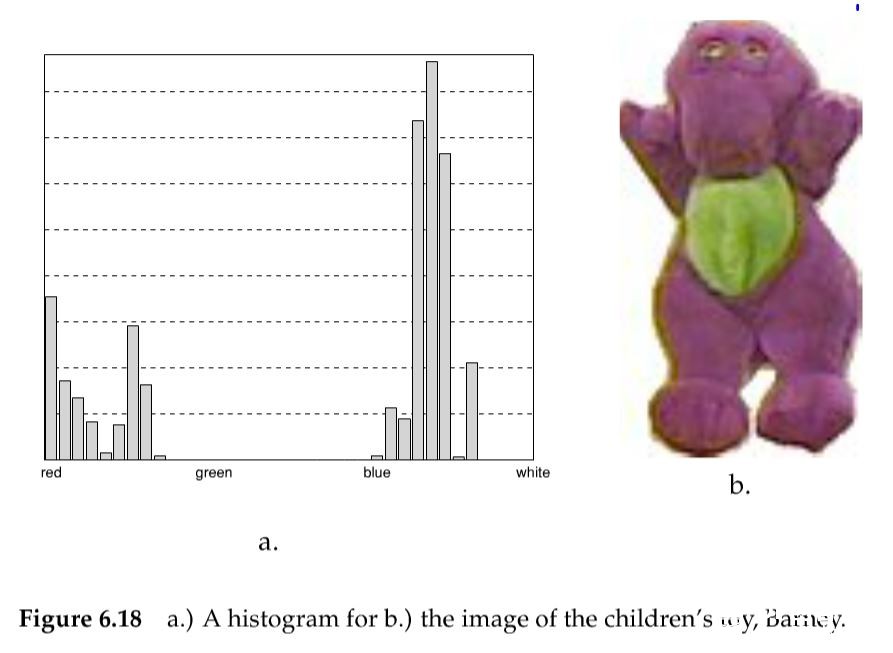 视觉测距 1、双摄像机立体测距仪 标定和测距的处理都相对复杂。 2、光条测距器(结构光检测器) 例如当前的kinect、realsense,属于RGBD传感器,可直接输出距离图像。 3、激光测距 激光测距精度高,使用简单 平面激光测距仪,如果安装成与地板平行,对于三维信息是欠缺的,例如会撞上比较高的凸起的尖角。 可以使用两个激光测距仪,一个略微向上,另外一个略微向下安装兼顾突出和下陷的障碍物。  RPLIDAR 360度激光扫描测距仪 4、纹理 地毯在图像中的色彩会随着光照而改变,但整个的纹理或者说纹理不会变换。用纹理来检测每个单元区域的边缘。 机器人把整个视场分为不同的角度和扇区,生成一个径向深度图或者类似的极坐标图。每个带有地毯纹理的扇区都标注为空。如果有人站在地毯上,那个位置就会有不同的纹理。机器人将该区域标注为被占用。 |
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







