|
18509| 3
|
[选型&资源] 蜂鸣器知识整理 |
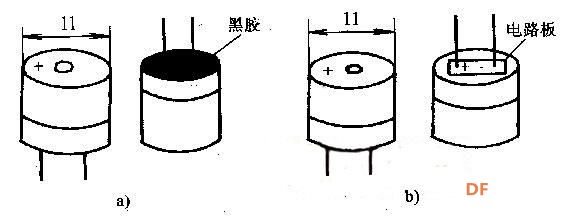
蜂鸣器的结构原理
蜂鸣器的制作
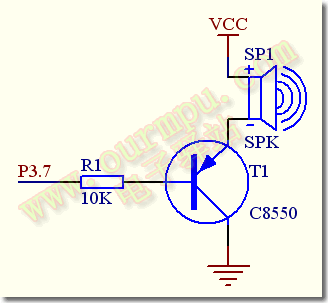
蜂鸣器驱动模块在单片机应用的设计上,很多方案都会用到蜂鸣器,大部分都是使用蜂鸣器来做提示或报警,比如按键按下、开始工作、工作结束或是故障等等。这里对单片机在蜂鸣器驱动上的应用作一下描述。 驱动方式由于自激蜂鸣器是直流电压驱动的,不需要利用交流信号进行驱动,只需对驱动口输出驱动电平并通过三极管放大驱动电流就能使蜂鸣器发出声音,很简单,这里就不对自激蜂鸣器进行说明了。这里只对必须用1/2duty 的方波信号进行驱动的他激蜂鸣器进行说明。单片机驱动他激蜂鸣器的方式有两种:一种是PWM 输出口直接驱动,另一种是利用I/O 定时翻转电平产生驱动波形对蜂鸣器进行驱动。PWM 输出口直接驱动是利用PWM 输出口本身可以输出一定的方波来直接驱动蜂鸣器。在单片机的软件设置中有几个系统寄存器是用来设置PWM 口的输出的,可以设置占空比、周期等等,通过设置这些寄存器产生符合蜂鸣器要求的频率的波形之后,只要打开PWM 输出,PWM 输出口就能输出该频率的方波,这个时候利用这个波形就可以驱动蜂鸣器了。比如频率为2000Hz 的蜂鸣器的驱动,可以知道周期为500μs,这样只需要把PWM 的周期设置为500μs,占空比电平设置为250μs,就能产生一个频率为2000Hz 的方波,通过这个方波再利用三极管就可以去驱动这个蜂鸣器了。而利用I/O 定时翻转电平来产生驱动波形的方式会比较麻烦一点,必须利用定时器来做定时,通过定时翻转电平产生符合蜂鸣器要求的频率的波形,这个波形就可以用来驱动蜂鸣器了。比如为2500Hz 的蜂鸣器的驱动,可以知道周期为400μs,这样只需要驱动蜂鸣器的I/O 口每200μs 翻转一次电平就可以产生一个频率为2500Hz,占空比为1/2duty 的方波,再通过三极管放大就可以驱动这个蜂鸣器了。 蜂鸣器驱动电路由于蜂鸣器的工作电流一般比较大,以致于单片机的I/O 口是无法直接驱动的,所以要利用放大电路来驱动,一般使用三极管来放大电流就可以了。 蜂鸣器驱动设计由于这里要介绍两种驱动方式的方法,所以在设计模块系统中将两种驱动方式做到一块,即程序里边不仅介绍了PWM 输出口驱动蜂鸣器的方法,还要介绍I/O 口驱动蜂鸣器的方法。所以,我们将设计如下的一个系统来说明单片机对蜂鸣器的驱动:系统有两个他激蜂鸣器,频率都为2000Hz,一个由I/O 口进行控制,另一个由PWM 输出口进行控制;系统还有两个按键,一个按键为PORT 按键,I/O 口控制的蜂鸣器不鸣叫时按一次按键I/O 口控制的蜂鸣器鸣叫,再按一次停止鸣叫,另一个按键为PWM 按键,PWM 口控制的蜂鸣器不鸣叫时按一次按键PWM输出口控制的蜂鸣器鸣叫,再按一次停止鸣叫。 电路原理图
软件设计方法先分析一下蜂鸣器。所使用的蜂鸣器的工作频率是2000Hz,也就是说蜂鸣器的驱动信号波形周期是500μs,由于是1/2duty 的信号,所以一个周期内的高电平和低电平的时间宽度都为250μs。软件设计上,我们将根据两种驱动方式来进行说明。 a) PWM 输出口直接驱动蜂鸣器方式由于PWM 只控制固定频率的蜂鸣器,所以可以在程序的系统初始化时就对PWM 的输出波形进行设置。 b) I/O 口定时翻转电平驱动蜂鸣器方式使用I/O 口定时翻转电平驱动蜂鸣器方式的设置比较简单,只需要对波形分析一下。由于驱动的信号刚好为周期500μs,占空比为1/2duty 的方波,只需要每250μs 进行一次电平翻转,就可以得到驱动蜂鸣器的方波信号。在程序上,可以使用TIMER0 来定时,将TIMER0 的预分频设置为/1,选择TIMER0 的始终为系统时钟(主振荡器时钟/4),在TIMER0 的载入/计数寄存器的高4 位和低4 位分别写入00H 和06H,就能将TIMER0 的中断设置为250μs。当需要I/O 口驱动的蜂鸣器鸣叫时,只需要在进入TIMER0 中断的时候对该I/O 口的电平进行翻转一次,直到蜂鸣器不需要鸣叫的时候,将I/O 口的电平设置为低电平即可。不鸣叫时将I/O 口的输出电平设置为低电平是为了防止漏电。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 老版主限定
老版主限定
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






