|
84175| 65
|
[进阶] 基于Romeo mini控制板的坦克设计与制作应用教程 |
基于Romeo mini控制板的坦克设计与制作应用教程 一.坦克实现简介 基于履带小车上的应用,制作一款具有观赏性,可玩性的应用设计——坦克原型车。并且可以迭代成可上线的,产品级别的应用。具体有如下几点远程目的: 1.设计一款新型履带底盘,具有实用,易于生产,易于组装等特点; 2.可以向mini型履带底盘转型,是的原有的miniQ小车又多了一个小伙伴mini tank; 3.具有观赏性的展品。 二.坦克制作清单
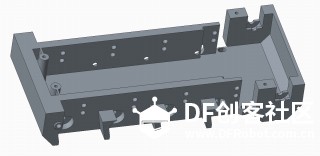
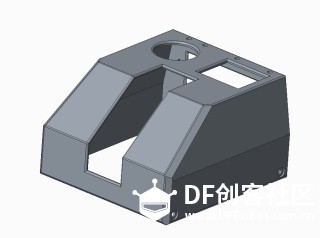
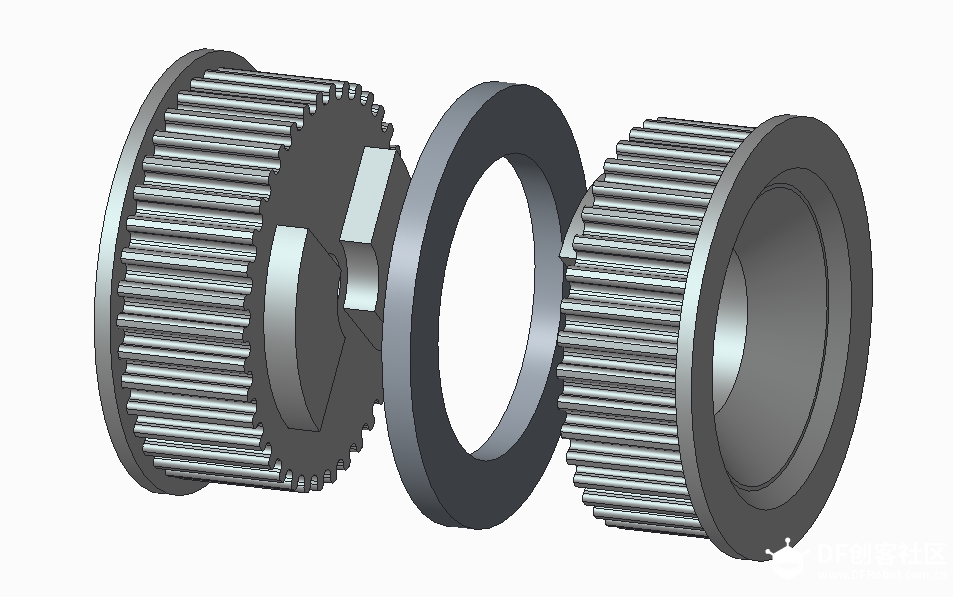
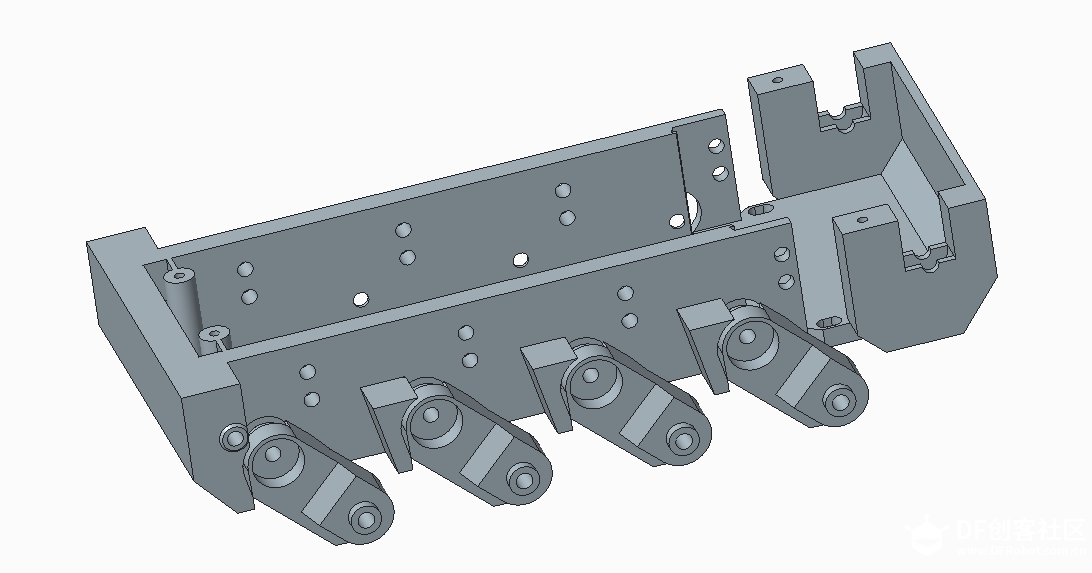
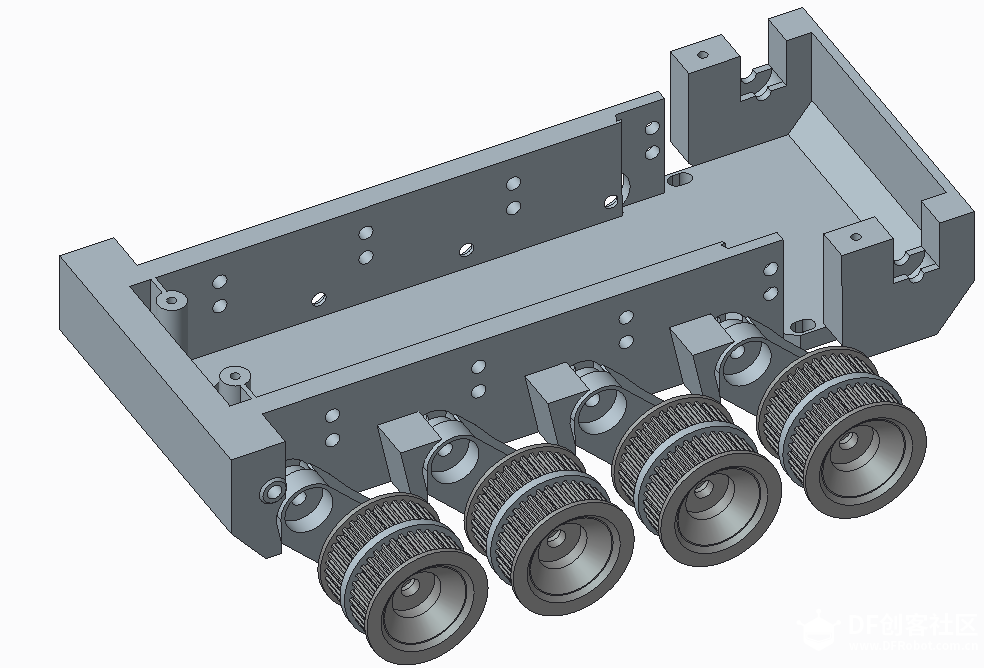
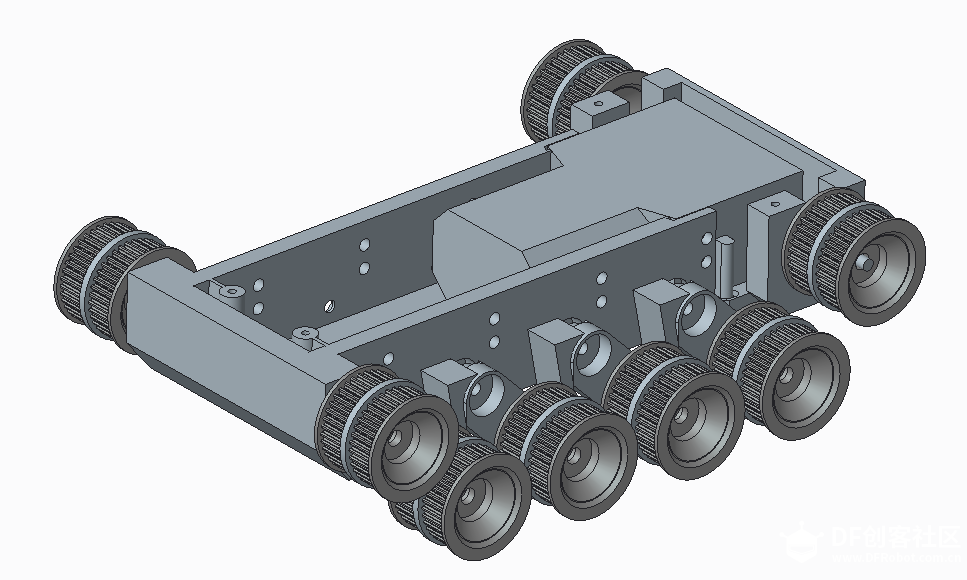
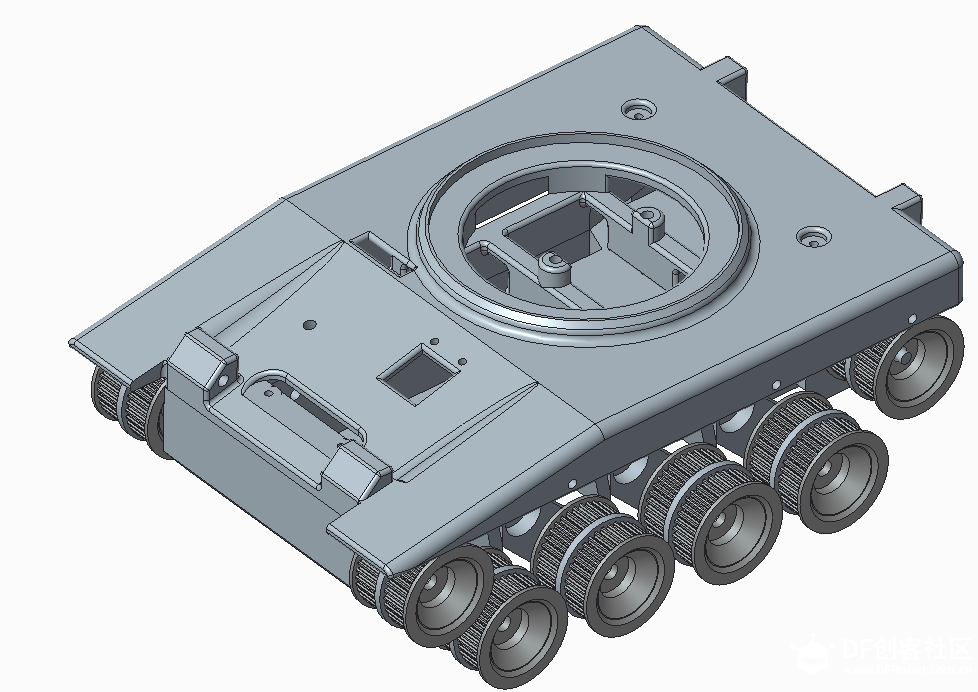
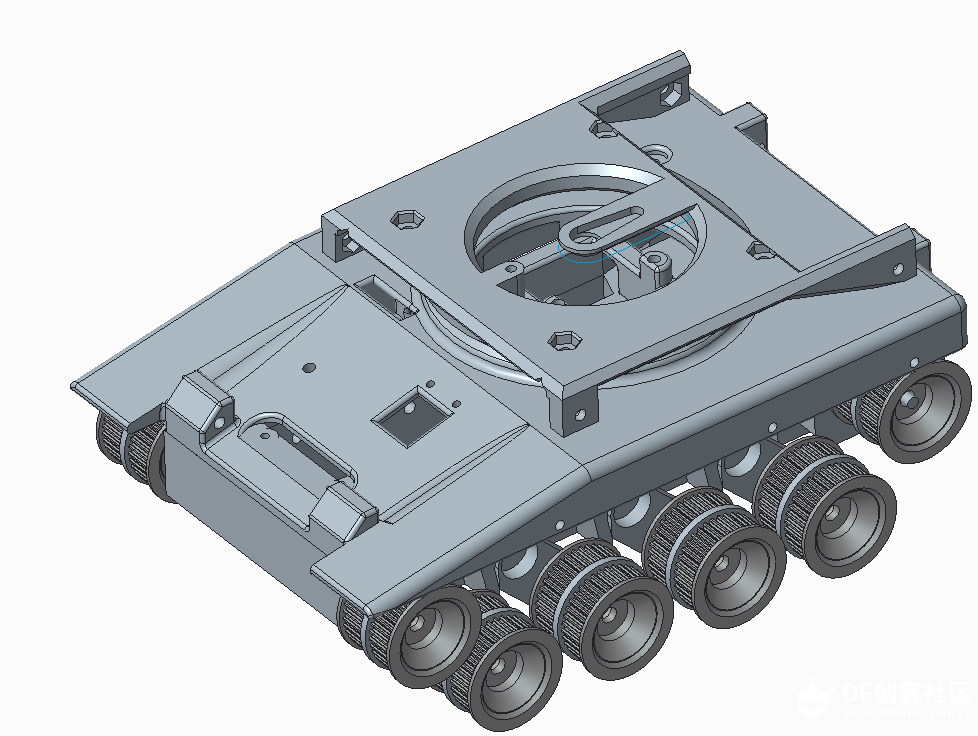
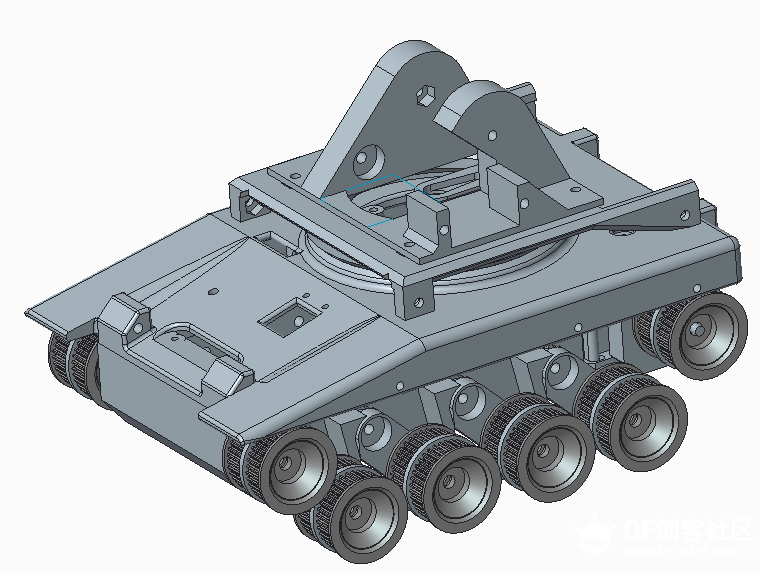
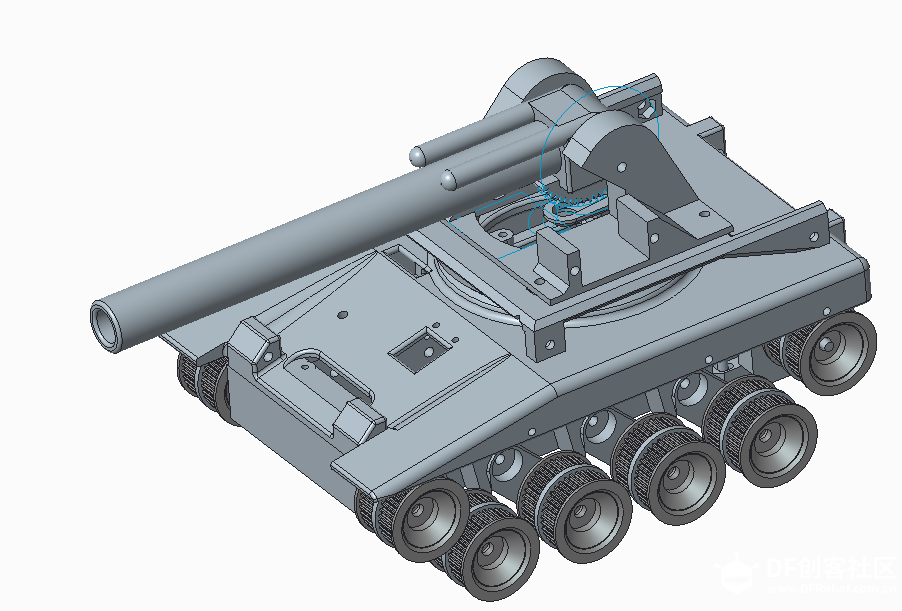
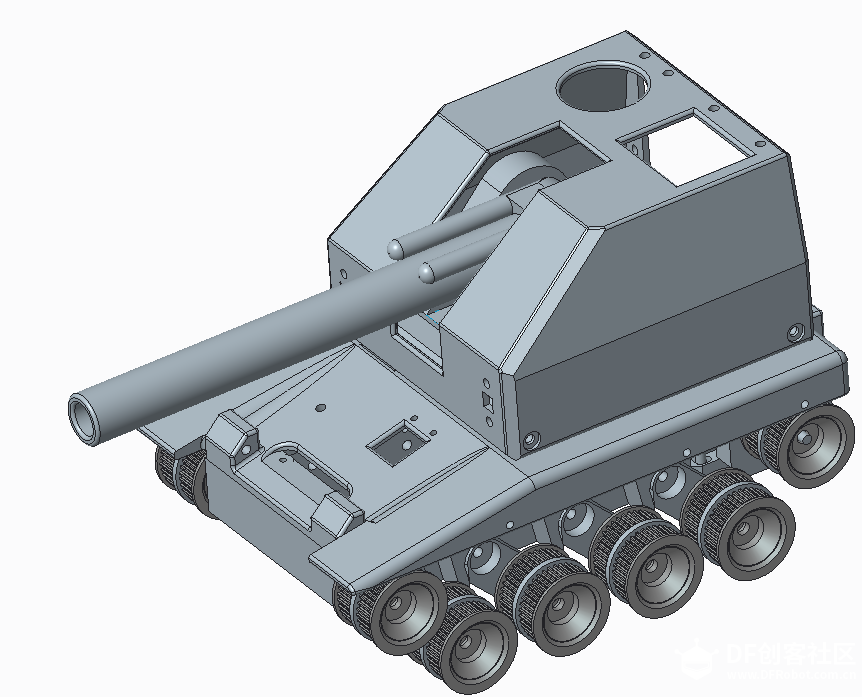
三.坦克组装流程(仅限于打印件组装未涉及到实际组装)
四.坦克电路介绍 为了实现能够通过手机控制坦克前进后退,我们选择的主控板是DFRobot公司设计的DFR0351 Romeo mini主控板,如下图所示:  该Romeomini控制板有如下特点:
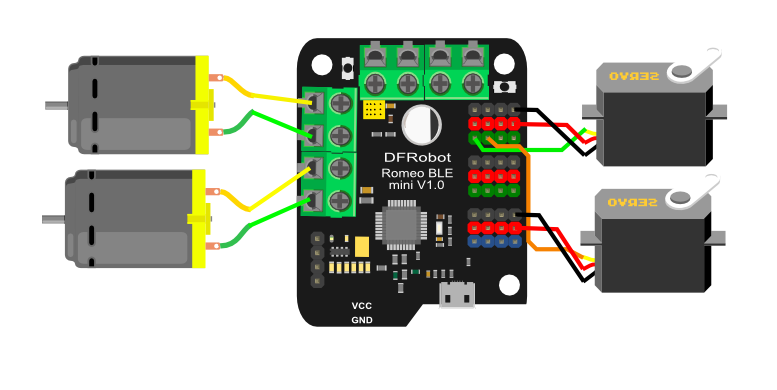 图中两只电机连接在电机输出口,两只舵机分别连接在数字口12号与13号。 五.坦克软件说明 下图为该系统的整体程序流程图,使用手机APP功能并通过蓝牙进行通讯。手机APP可通过手机中的应用商城进行下载(仅限于IOS系统)。需要注意的是每个按键按下都有相应数据赋值,根据数据赋值的情况来判断各个功能是否需要完成,比如说检测到遥感的X轴有数据,则将该数据保留并且完成相应的功能,如小车变速或变相。 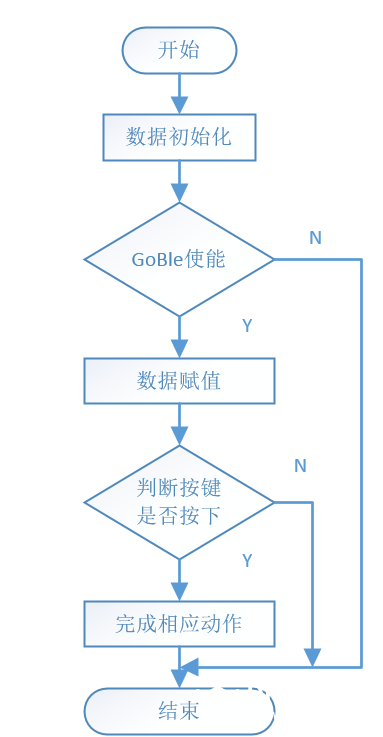 整个坦克功能有如下: 1) 坦克前进后退; 2) 坦克原地左转与原地右转; 3) 坦克炮塔左转90度右转90度; 4) 坦克炮筒在0到45度的范围内转动。 通过以上功能开始分配手机APP上定义的按键,如下图所示: 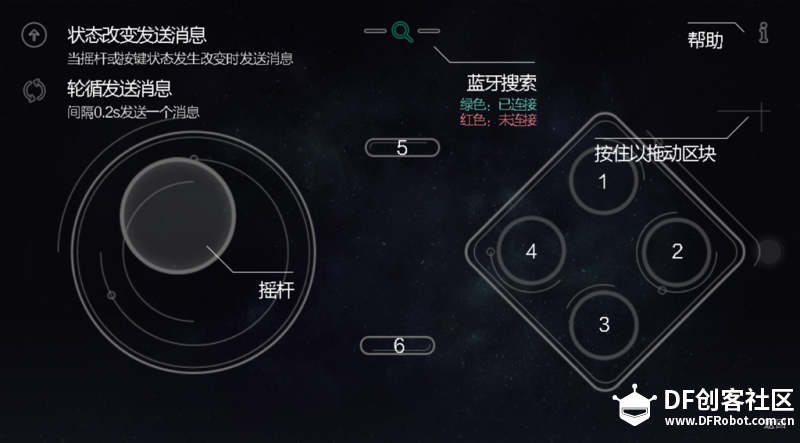 上图为手机APP控制端的截图,图中遥感控制小车移动,按键则控制坦克炮塔和炮管,具体分配如下: 1) 遥感上拉和下拉分别控制坦克前进和后退; 2) 遥感左拉和右拉分别控制坦克原地左转和原地右转; 3) 按键区域的1键和3键控制坦克炮管上拉和下拉; 4) 按键区域的4键和2键分别控制炮塔左转和炮塔右转;通过上述分配的功能,则程序中的具体表现为如下介绍:
以上则为整个程序的大致框架和部分说明,该手机APP的具体介绍可见官网WIKI,网站链接 六.应用设计工具说明 编程软件平台:该设计所建立的应用平台是Arduino平台,该平台有着简单易懂,经济实惠等好处,其丰富的开源库以及简单易学的函数接口,使得该平台完全胜任这套设计; 绘图软件平台:该设计所用到的所有图形设计均使用Pro/E软件设计并绘制出。该软件有个很好的好处就是可以拼接所有画好的零件图,将这些有序的零件搭建成一个整体,可以很好的观察各个零件的设计,美观等问题。 3D打印机:所有零件是由DFRobot公司设计的OverLoad3D打印机制作的,该打印机的精度高,所打印的零件硬度强,完全足够用来设计产品的外观部件。而且所使用的材料成本低,无毒无污染。 七.注意事项 1)机械安装的同时需要兼顾电路中的走线,合理利用空间;2)加入舵机之后的系统安装会增加其复杂性,所以需要合理构思安装顺序,如上身壳安装好了之后就开始安装9g舵机,而不能安装炮塔支撑。 3)制作之前需要提前调试硬件电路和部分软件功能,以提高应用的准确性。 本门简要的阐述了整个坦克的安装过程,主要目的是了解和探究Romeo BLE MINI控制板的性能。 小车源代码: mini_tank.rar mini_tank.rar |
|
666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666666 |
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed











 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 为什么不发STL文件
为什么不发STL文件



 斯够以。
斯够以。  当家的屎哥@Ash 非让我说话!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!只发图不说话没糖
当家的屎哥@Ash 非让我说话!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!只发图不说话没糖








