|
34329| 18
|
[项目] 基于Arduino的甲壳虫改装设计(第二代) |
|
一.甲壳虫应用背景 在我们miniQ小车平台上,设计一种具有仿生功能的外观设计。采用低成本的3D打印技术来实现这一外壳,其质量,纹理,强度与重量都能很好的满足这一设计的要求。在美国MAKERFAIRE会展上,这一设计也得到了很好的评价,仿生型的外观,廉价的制作成本,加上有趣的运动型设计方案给这台miniQ平台带来很大的开发空间和宣传效应。  这种设计给原有枯燥的小车设计带来新生,原有的小车只是搭建功能如寻线避障,但是加入外观后的小车平台会显得更加具有吸引力和活力。在展示作品和制作产品上都有很大的发展空间,目前市场上还没有基于可移动平台上的外观产品,能够直接接入到开发流程中去,唯一的途径就是开模。虽然说开模出来的产品外观很不错,但是对于非批量的开发来说无疑是提高了巨大的成本和开发精力。 二.制作材料与工具 2.1 制作零件材料:
2.2 制作工具
三.实体搭建 3.1 组装零件 有了以上五个零件我们还需要两片金属合页。零件齐全之后我们就可以进入组装步骤了。 1. 首先将两只9g舵机安装在“嘴”上,用M3*5的螺丝固定在零件上,在把M3螺母放置在零件末端的沉孔里面;  注:安装之前需要将舵机调整到90角,将舵机实现连接到控制板上,写下程序调整角度,然后在将舵机摆臂固定上去。 2. 将两片合页放置在“头骨”零件的上方孔中,用M3*15螺丝和M3螺母将其固定在相应位置上,在将避障传感器安装在零件前方的位置中,然后使用M3*8螺丝和M3螺母固定; 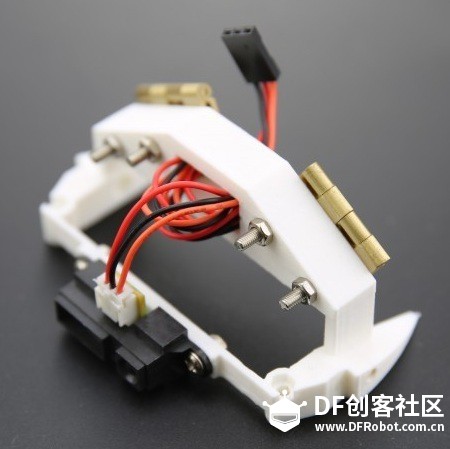 注:合页上的螺丝选用平头螺丝安装,这样可以让合页很好的闭合。 3. 将组装好的“嘴”零件和“头骨”零件结合起来,使用M3*12的螺丝固定两个零件;  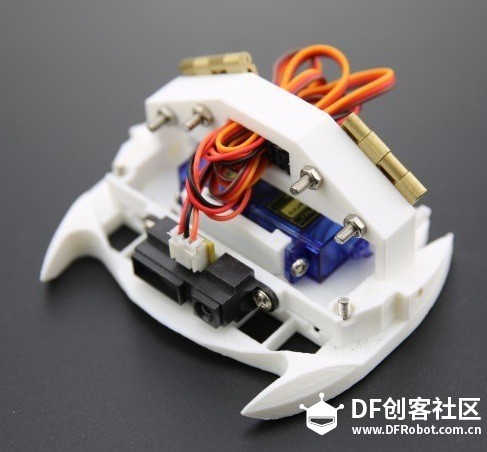 4. 将两只翅膀分别于对应的合页连接起来,使用M3*8螺丝和M3螺母将其固定在合页上; 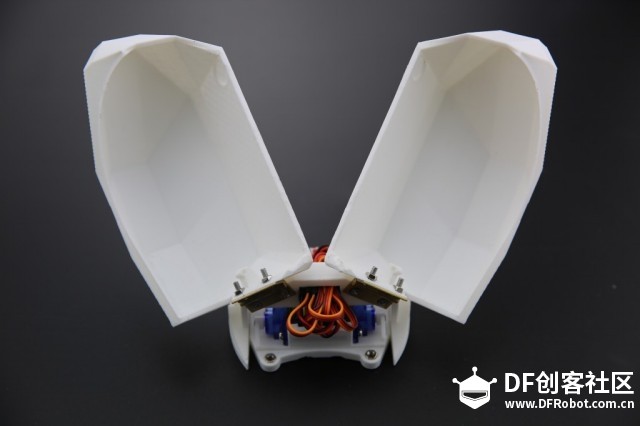 5. 取两根长度各50mm的铁丝将其制作成如下图(左)所示的图形,然后用尖嘴钳将他固定到翅膀和舵机中去,效果如图(右)所示; 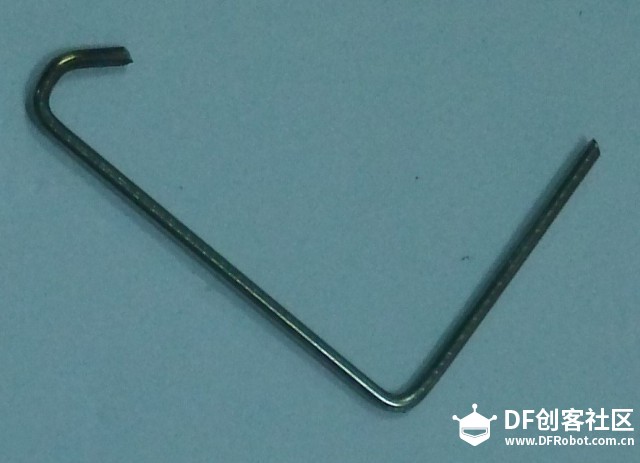 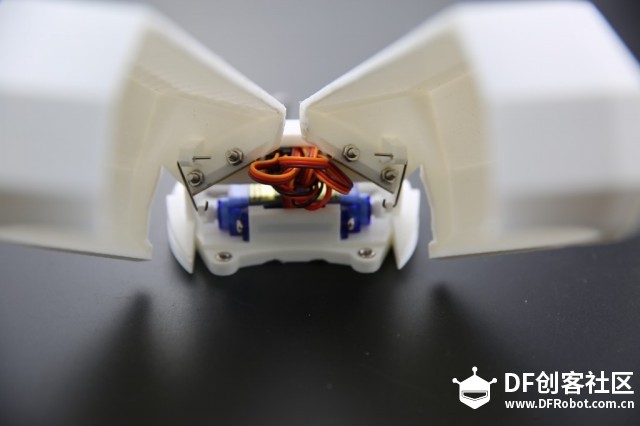 6. 将一台mini Q小车按照其教程组装好;  7. 将“头皮”零件通过M3*8螺丝固定在“头骨”零件中;  8. 将组装好的甲壳虫外壳和组装好的mini Q小车结合起来,通过M3*8螺丝固定起来; 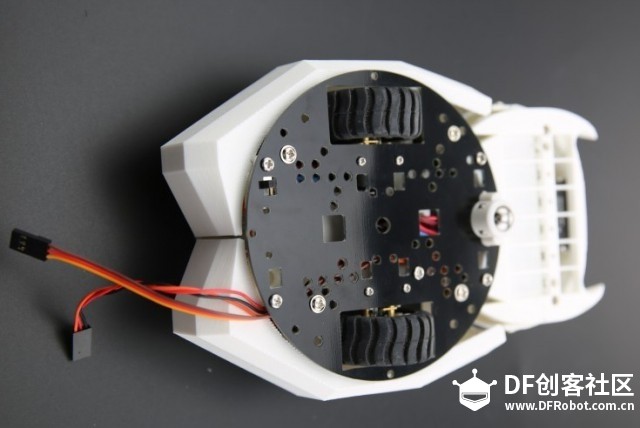 9. 将2个舵机线和1根避障传感器线按照电路图的连接方式连接在电路板上,两个舵机一个接数字口9号脚,一只接10号角,传感器引线接模拟口A0口;  10. 最终完成甲壳虫小车。  3.2 电路部分 3.2.1 电路图 为了实现小车避障功能,我们搭建了如下图所示的电气连接图: 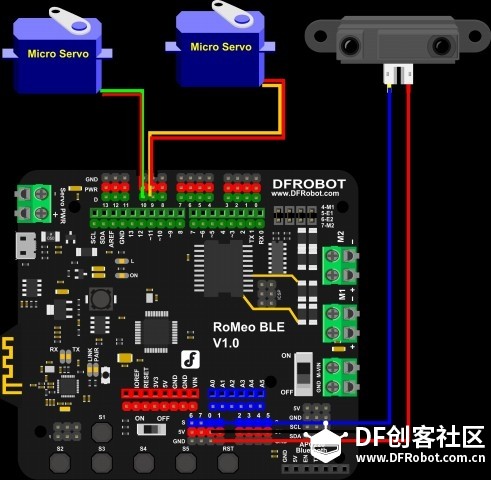 避障传感器连接模拟口A0端口,两只舵机分别连载数字口9号与10号端口。该电路可以实现遇到障碍物时让翅膀张开。 3.3 软件部分 3.3.1程序流程图 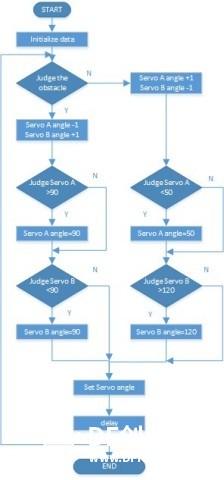 上图为甲壳虫遇到障碍物时会张开翅膀这一功能的程序流程图。该程序从开始到结束中间这段所执行的内容为循环执行。 3.3.2程序说明 程序总共分成三个部分:1)数据准备;2)条件判断;3)延时系统; 数据准备:将小车上避障传感器探测的数据进行处理保存, 条件判断:该过程有两个部分,一是判断避障传感器有没有检测到障碍物,二是判断舵机的转角是否为最大角或者最小角,进行门限处理。 延时系统:通过delay延时函数进行对整个系统的时序进行调整,从而达到让系统变化的更加平滑。 4 注意事项 1)组装舵机时要先对舵机旋转到90度,可以连接到控制板将其设置到90度,然后在将半一字摆臂安装上去,安装过程中保持摆臂水平安置; 2)整个安装过程是先组装打印件在将组装好的零件和小车连接起来,所以拆卸的时候也要先分离小车和打印件,然后在拆打印件; 3)组装过程中难免会有走线,所以要整理好走线,合理的分布走线的位置,确保不被挤压即可; 4)组装好了之后如果对小车的程序进行调整,那么需要将小车从打印件上拆下来,这样的工作很繁琐,建议使用蓝牙下载程序,使用教程请点击使用链接。 5)组装好了之后翅膀会和舵机相连,所以尽可能少强力掰开翅膀,以便损坏舵机,也建议使用金属舵机,可选此型号点击使用链接。 |
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed











 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 后期再准备优化以下,但是圆形的应该不在考虑范围之内,体积略大。。。。。
后期再准备优化以下,但是圆形的应该不在考虑范围之内,体积略大。。。。。






