|
54585| 25
|
[进阶] 基于Romeo 的搞笑垃圾桶的设计与制作 |

|
先看看这个搞笑垃圾桶怎么搞笑法!!! 当垃圾桶能够检测到有垃圾进入桶内时,就会离开原来所处的地方,并且有自动避障功能,大约8秒后将会停下并发出偷笑的声音。给人感受是自己的垃圾桶在和自己躲猫猫。  下面就瘪呀唧一下具体怎么去做,很简单的哟: 首先准备材料:
以上是主要器材,然后还有些辅助器材可以在淘宝里面,甚至是超市都可以买的到的,比如魔术贴,胶带,橡皮泥,垃圾桶等,当然工具的话少不了螺丝刀,美工刀和老虎钳咯。接下来开始谈谈这货的制作过程。 机械部分制作流程: 接下来讲一下整个系统如何组装,首先你需要有这个3PA小车移动平台。如果你有其他的小车平台也可以,主要是这个3PA小车平台它是圆形的,而大部分垃圾桶也是圆形的,这样挺匹配这个小车平台的。还有一个特点是这个小车平台是两轮驱动的,其灵活性非常高,做起来也很简单。 如果你买这款平台去的话,具体点此链接去观看教程。上面会一一讲述如何制作的,本帖在这里就不啰嗦了,直接以做好的底盘来讲述。 第一步:取两个避障传感器,将其安装在小车前方。如下图所示  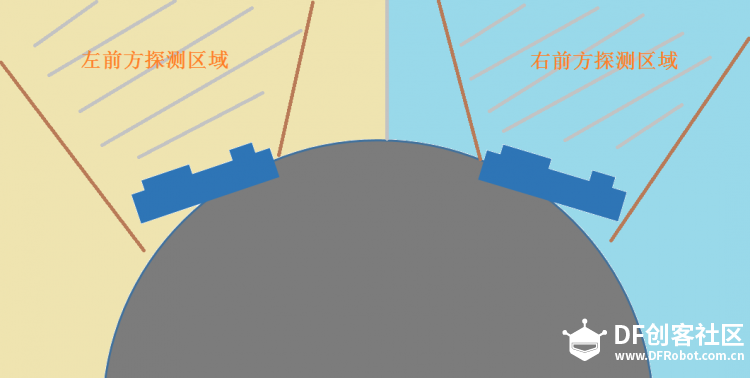   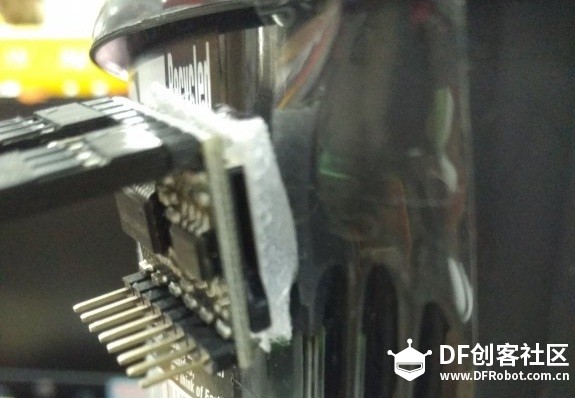  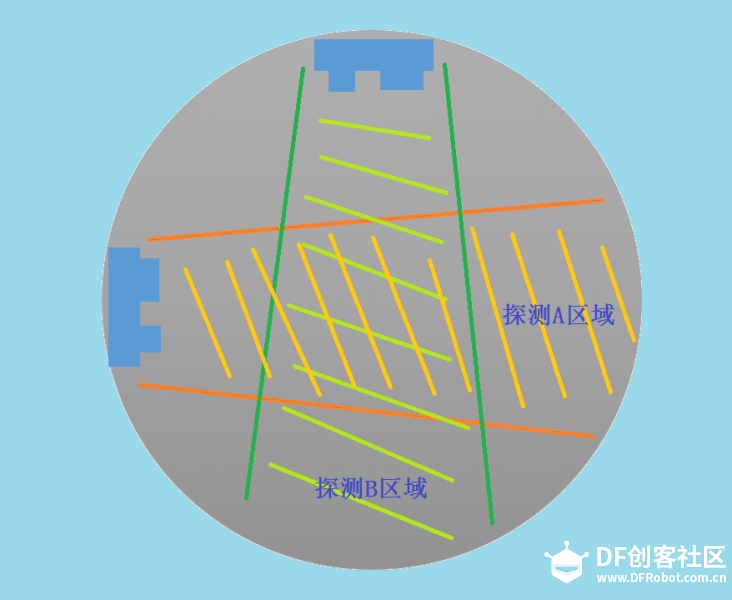 电路部分制作流程: 根据整个垃圾桶完成的功能,将所有的电子器件连接在一起,具体见下图所示 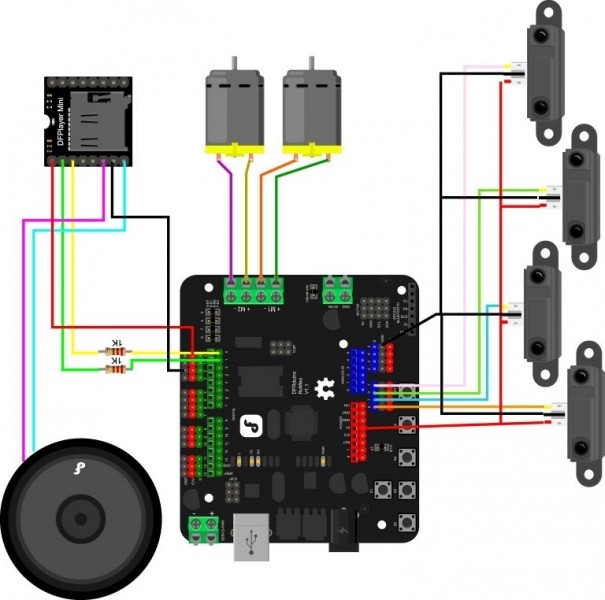 中间的核心控制板是Romeo 控制板,该控制板是DFRobot独家为机器人爱好者开发的一款基于Arduino的多功能实用控制器,能够利用Arduino平台下丰富的开源代码资源。该控制器不仅继承Arduino328控制器所有的特性而且集成了电机驱动、键盘、IO扩展板、无线数据串行通讯等接口。这就意味着Romeo不仅可以兼容几乎所有Arduino系列的传感器和扩展板而且可最多直接驱动12个舵机。用户不在UNO上叠插一堆扩展板,节省空间和精力。 Romeo为用户添加更多人性化设计,采用了3P彩色排针,能够对应我们的传感器连接线,防止插错烧元件。另外每个端口还添加了公母头排针,不论你用的是何种线材,能够放心的插在Romeo上。其中红色对应电源,蓝色对应模拟口,绿色对应数字口,黑色对应GND。 测距传感器总共有四个,有两个安装在底盘上面,主要检测小车前进时前方的障碍物,另外两个安装在垃圾桶上方用于检测是否有垃圾进入。音乐播放功能在图的左侧部分,喇叭和MP3模块构成了这个机器人的发声部分。两个电机是用于驱动该平台 软件部分制作流程; 通过前面的功能介绍我们大概知道整个系统运行的思路,根据这个思路我们建立一下程序流程图: 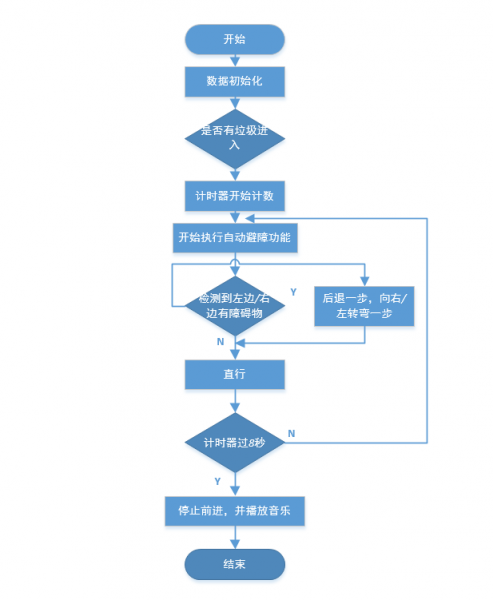 场景:原本一个垃圾桶放在那里,结果有人放了一个垃圾进去,随后垃圾桶不见了,然后突然听到有笑声,根据这个笑声我们找到了淘气的垃圾桶。 思路:当垃圾桶检测到有垃圾进入是,计时开始,紧接着小车开始跑起来,由于加入了自动避障功能,所以能够防止垃圾桶在行走的过程中碰到别的东西,等8秒的跑动时间结束了之后,小车停止并启动MP3模块播放音乐,最后结束。 附件:测试代码  smart_dustbin.rar(本代码后期加入了遥控功能,如果你也想加入遥控功能请购买Romeo BLE这块带蓝牙的板子,小编用的就是这个点此游览。不用的话测试代码也可以正常运行,不过要确保端口正确连接。) smart_dustbin.rar(本代码后期加入了遥控功能,如果你也想加入遥控功能请购买Romeo BLE这块带蓝牙的板子,小编用的就是这个点此游览。不用的话测试代码也可以正常运行,不过要确保端口正确连接。) |
 老版主限定
老版主限定



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed






 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 万一努力实现了呢
万一努力实现了呢






