|
7792| 5
|
步进电机原理简介 |
|
步进电机,很多人DIY激光雕刻机,3D打印机的时候都会用到。那么他与普通的直流电机有什么不同呢? 步进电机在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。 当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 这个特性说明了步进电机一个非常重要的特性。在开环条件下,步进电机正常工作时具有非常精确的定位能力,其转动的快慢,转动的角度都可以由收到的脉冲数调节(也就是程序调节),这也是为什么3D打印机和激光雕刻机都需要步进电机的原因。但要注意,如果负载过大,或者供电不足,则有可能出现角度不足的情况,我们称之为”失步“,即没有达到预定控制的角度。所以使用时一定要选择功率足够的电机以及电源。 我们一般用的步进电机是这样的:  他的结构图一般是这样的: 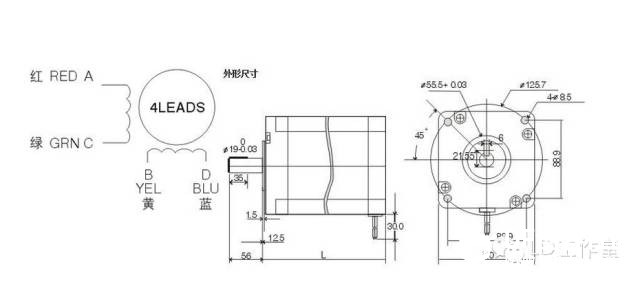 那么这个AC,BD代表什么呢?步进电机又为什么具有以上的那些特点呢?这就要从步进电机的特殊结构说起。先上一个步进电机内部的结构示意图: 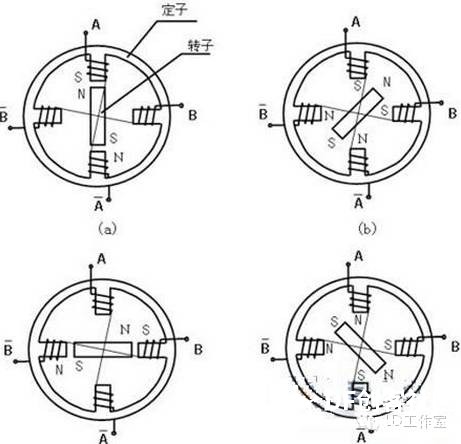 先从这个简单的图分析原理,图中有两组绕组A A-,B B-,可以看出他们分别形成的磁场是相反的,位置也是相对的。这2组绕组对应真实图中的AC和BD。 定子为铁芯,A A-,B B-绕在铁芯上,通电之后产生磁场变成电磁铁,转子为永磁体,磁场将对转自产生吸引或者排斥。 左上图A A-吸引转子,使得转子竖直(此时只有A A-通电)当B B-也通电后,B B-也产生磁场,此时转自将像A B中间区域偏转,具体偏转角度跟A B上电流大小比例有关。 左下图此时A A-断电,B B-继续通电,则转子被吸引到水平位置。 右下图此时A A-反向通电,B B-继续通电,则转自顺时针旋转,重复以上过程,则转子可以进行旋转运动,并控制通电的时机以及顺序,便可以达到控制步进电机旋转角度。 通过以上过程可以看出,驱动步进电机是比较麻烦的: 1、需要按照顺序控制各组线圈的通断。 2、电流方向也需要转变。 除了两相的,同样原理也有三相四相五相的步进电机。 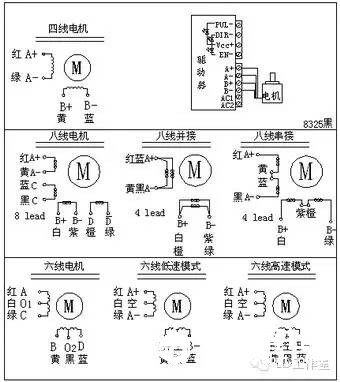 下图可以看出四相的电机最基本的是8线的,但是最常用的确是6线的,其中每2相共有一个端口。 当然,在Arduino中这些都被模块生产商和他们提供的库给解决了。大部分人不用再关心他底层的驱动方式。但是了解这些有利于在出问题的时候快速定位问题,毕竟库不是万能的,也不是全部适用的呀。 |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






