|
45810| 28
|
[项目] 自制六轴平台(视频更新了) |
先上图: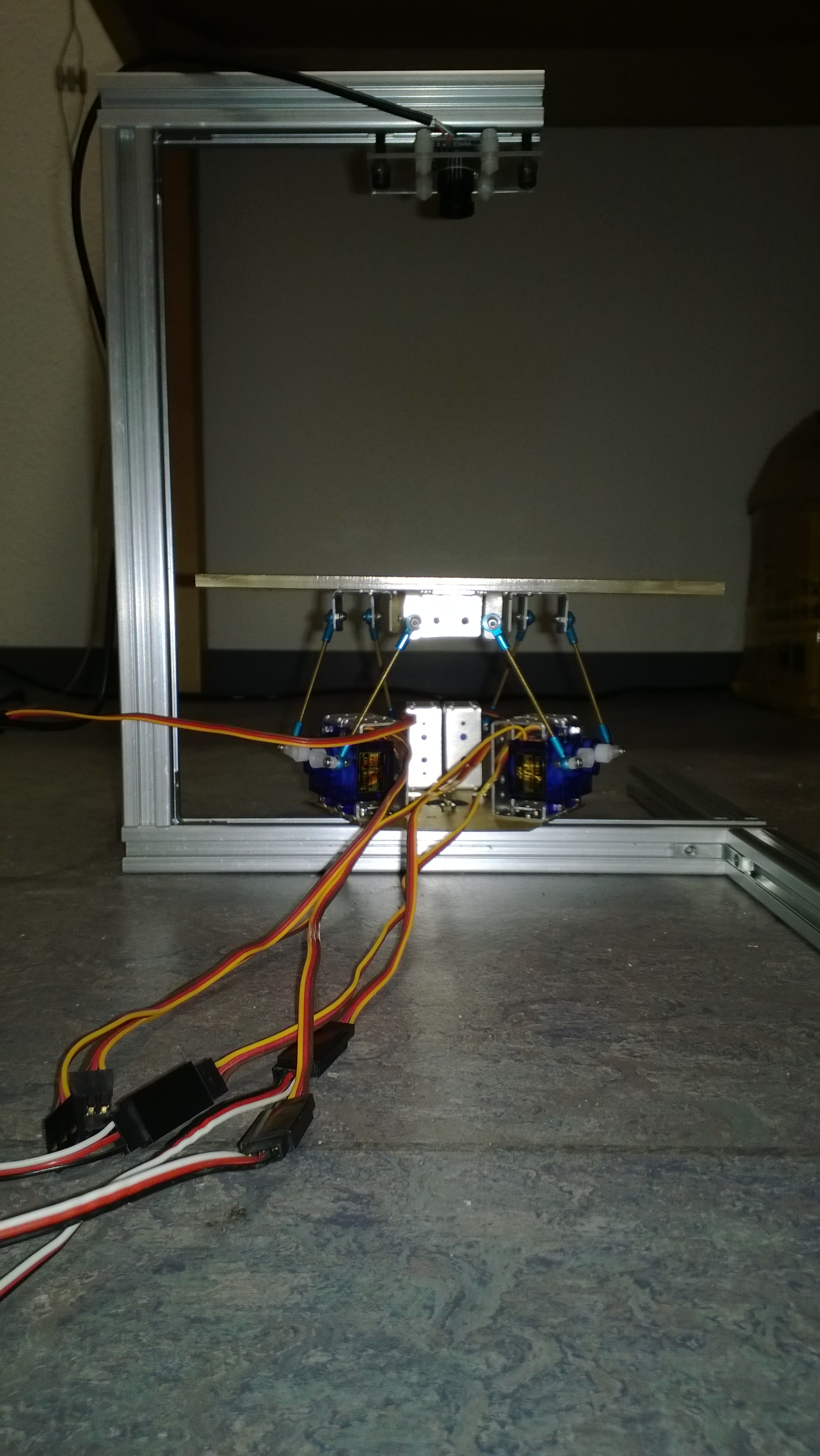 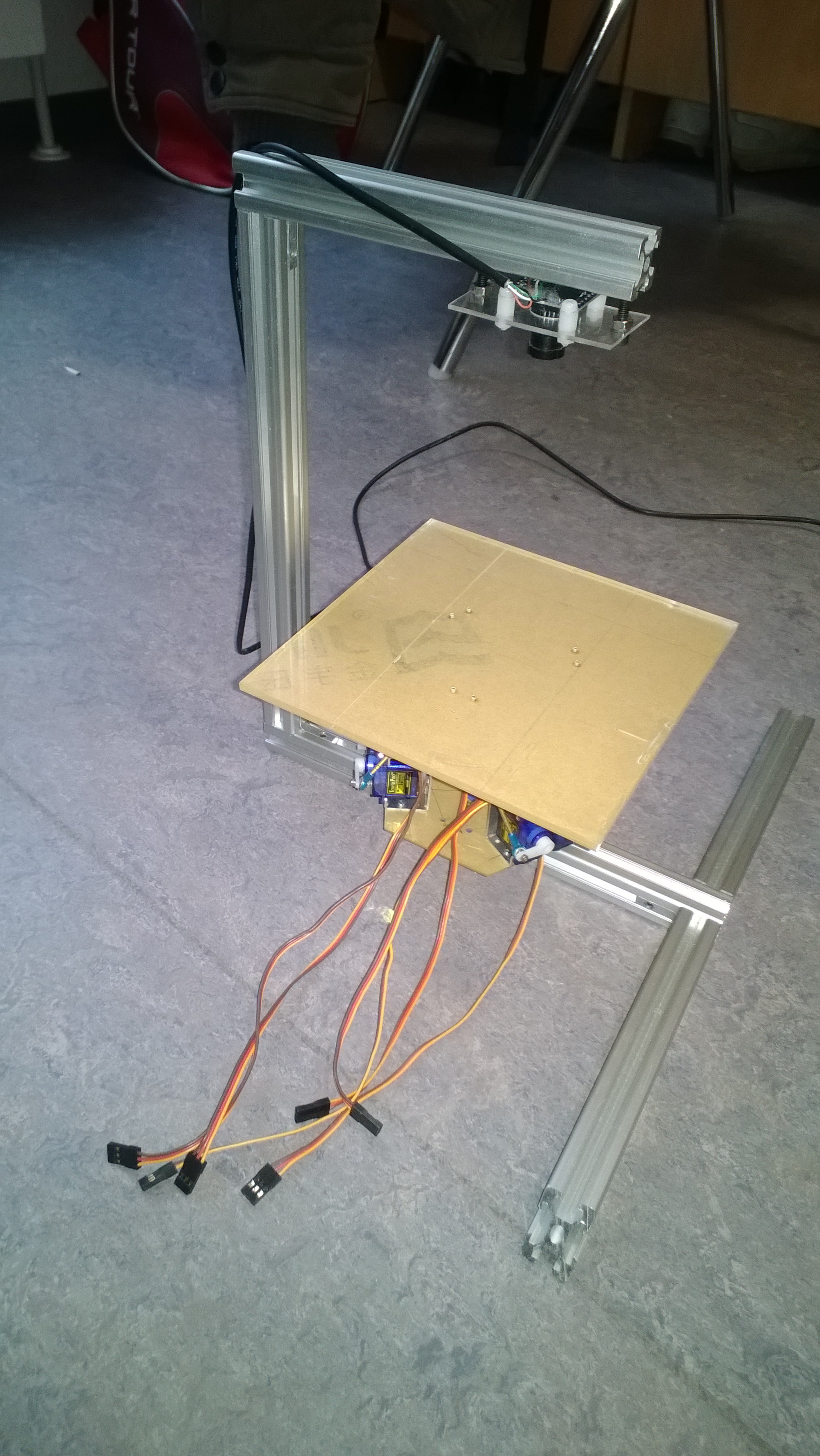  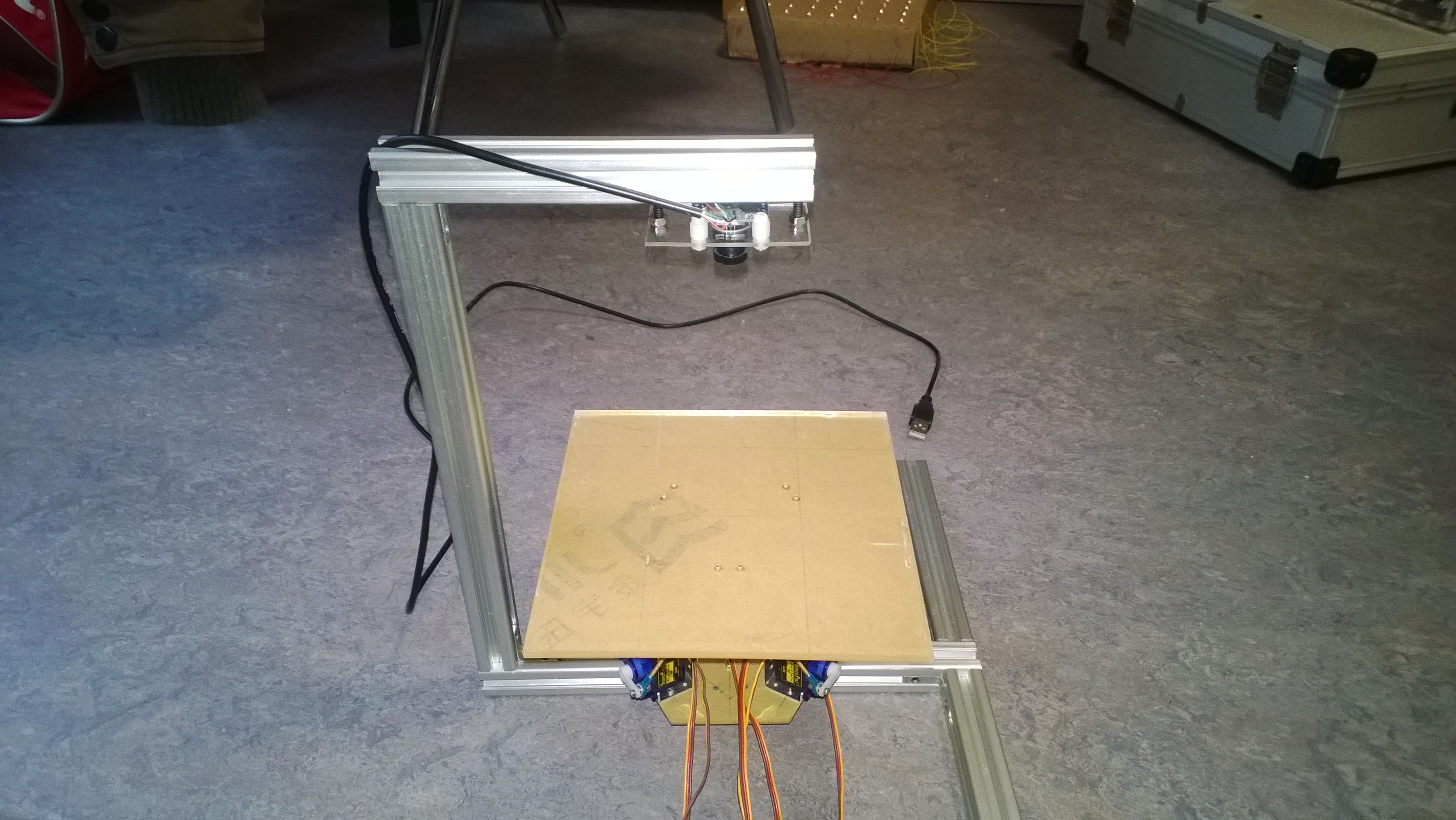 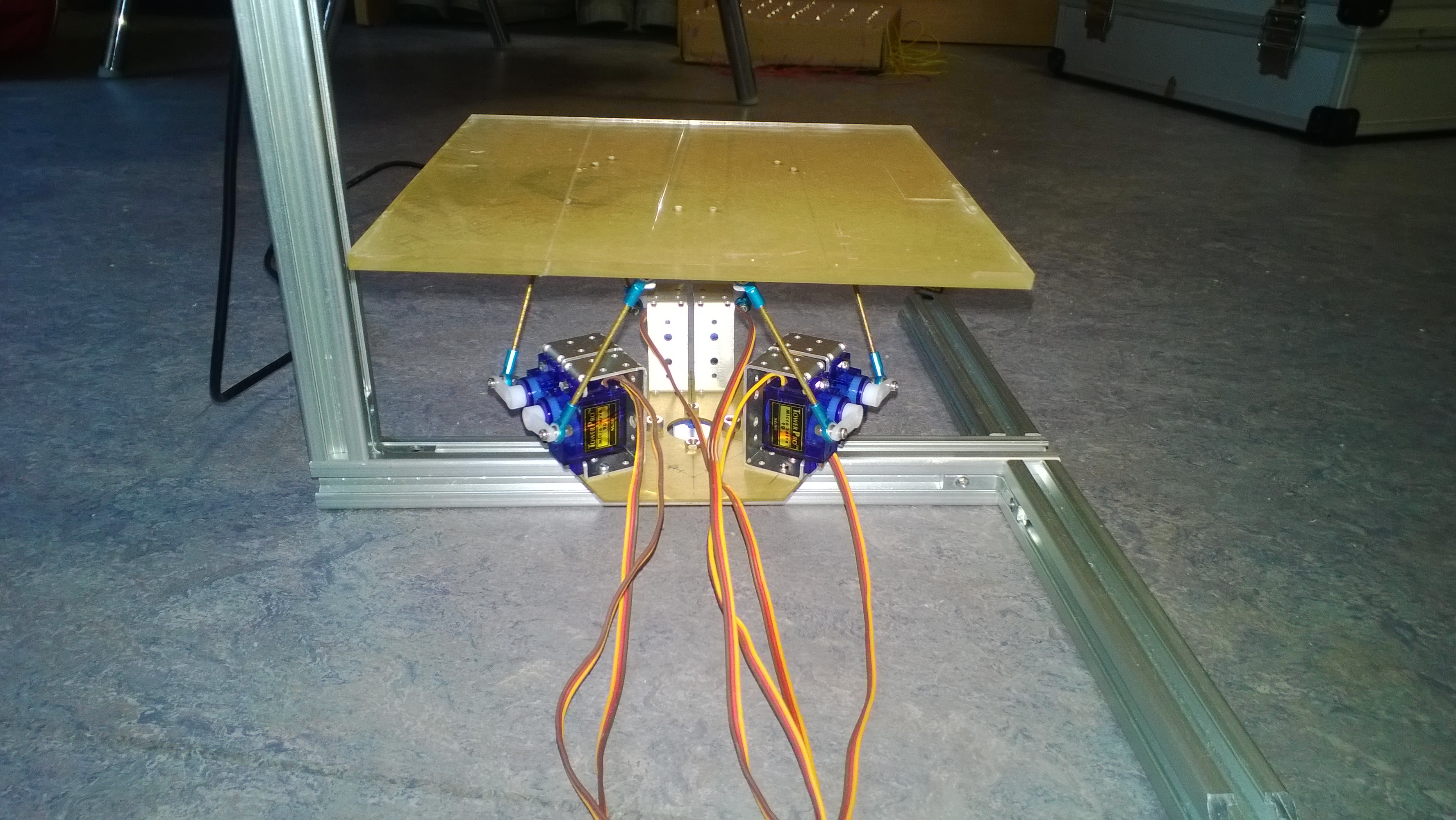 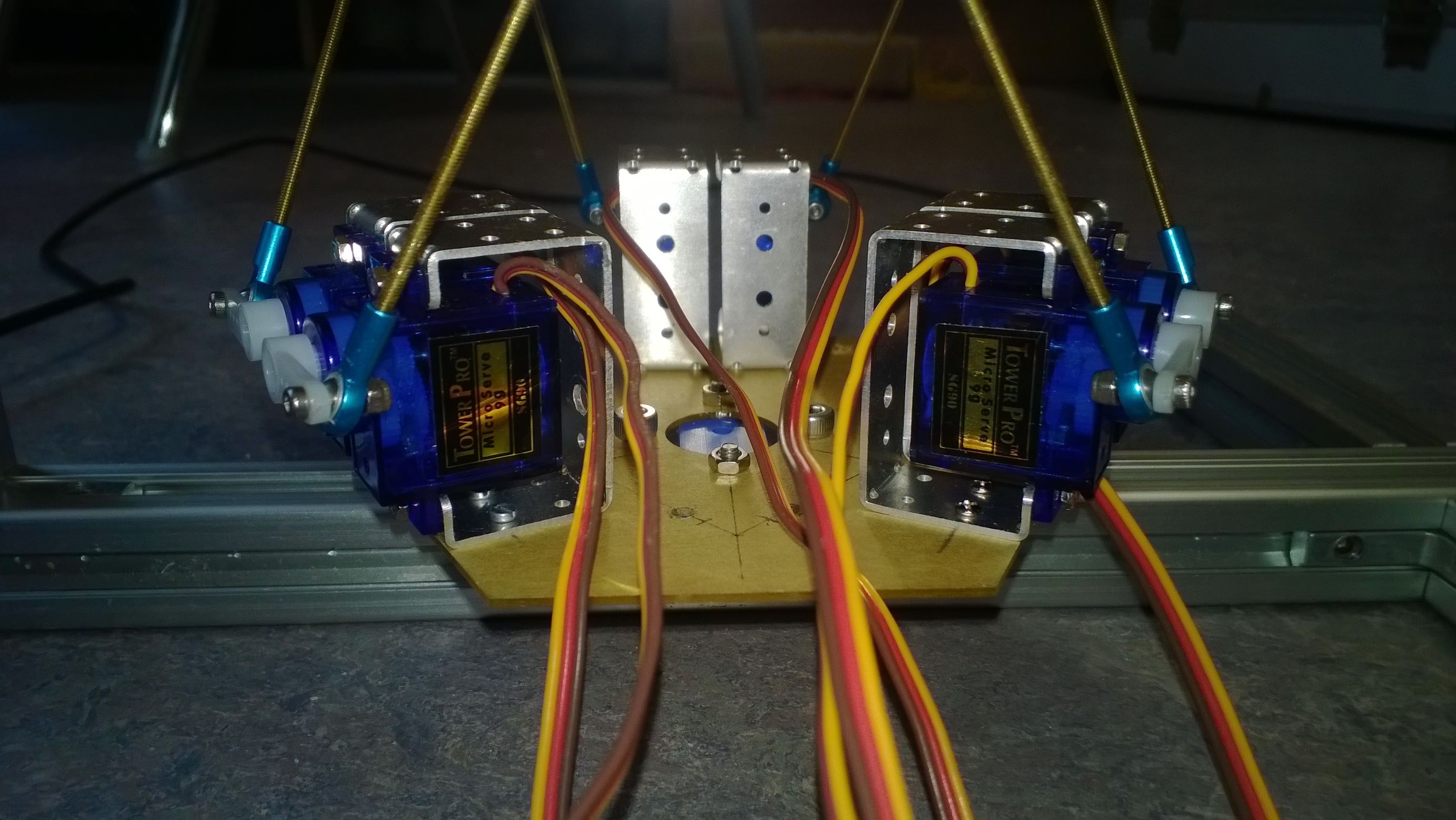 材料清单: 2020铝型材 摄像头1个 9g舵机6个 舵机金属球头(M2)12个 铜螺杆 9g舵机支架9个 底座和平台多是有机玻璃 用32路舵机控制板来驱动这六个舵机 底座的有机玻璃板有点薄(手头没有其他现成的材料了),9g的小舵机质量不是很好,控制起来还是比较粗糙。 上两个视频 第一个,可以实现的所有运动,精细点的话可以作为飞行器的控制模拟平台 第二个,现实版的平衡小球,这里还加了一块uno控制板。用摇杆控制,外加一个数字按钮,用于reset和摇杆位置修正 下一步工作就是要跟图像定位联系起来了。之所以在顶上加了一个摄像头,是为了用opencv处理图像,控制舵机,把小球移动到平台上制定的位置。C语言可以跳过Arduino控制板直接和32路舵机控制板完成串口通信。 新视频来了 小球静态定位测试。为了测试坐标转换 |
社区活动向导 发表于 2014-2-12 16:30 :) 我已经放过了东西去参加3D打印机大奖了 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






