|
54298| 28
|
[项目] 动捕+VR+远程机械臂控制 |

花了一个星期时间,攒了个Demo玩玩。两台手机、VR、手臂动捕、机械臂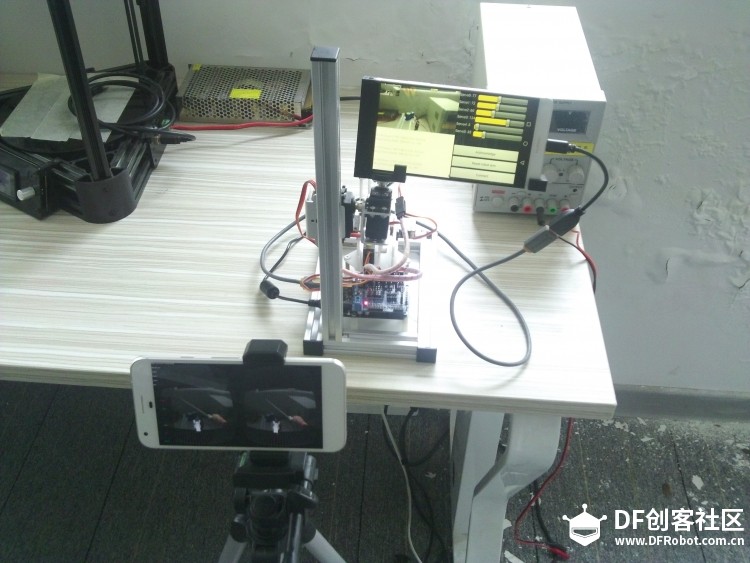 视频走起 PS:为了避免控制代码堆栈,从扮演VR头显角色的手机发送指令的间隔设置了100ms,另外除非舵机的下一次转角会大于3度,否则不会发送指令。所以现在看上去不流畅,之后再慢慢优化吧。 功能独立演示的视频 “头部”同步转动的视频 VR环境下牵引机械臂的视频(那个角度正好被其中一台手机挡住了夹持器) 先介绍下涉及到的硬件 淘宝上弄来的小机械臂。除去夹持器的话,只有三个自由度。用2020铝型材搭了一个支架,上面固定了两个舵机用于实现手机的转动(后面会详细介绍)。用Arduino Duemilanove(加了一个拓展板)控制所有的舵机。 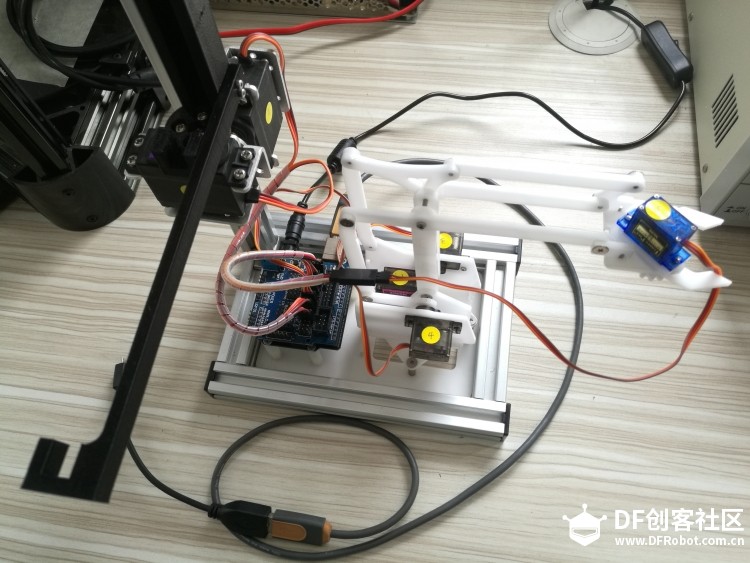 把手机组装上去的样子  用OTG线连接这台手机和Arduino Duemilanove。这台手机有两个作用: 1. 开启摄像头,做局域网的图像回传。 2. 通过局域网接收机械臂的控制指令,并传递给Arduino Duemilanove完成进一步的控制。 这里先说明一下,这里“手机+Arduino”的实现方案完全可以用Intel Edison的板子来完全代替,或者用淘宝上刷好Openwrt的小路由器代替手机,实现起来也会简单很多。但我之前做过“安卓USB通信”的东西,另外想直接搞个监控界面出来,所以还是用回了“手机+Arduino”的方式。 这台手机的软件架构大概是这样的: 1. 把手机变成一个Http服务器。需要提供两个访问端口(Port):一个端口接收控制指令,并回复客户端;另一个端口在收到客户端请求时回传一帧摄像头图像(后面会说明为什么没有用视频流而是一帧图像)。 2. 搭建手机和单片机之间的USB通信。 下面就是软件的界面,简单说明一下: - 左上角是图像监控窗口,可以看到里面的图像是重叠的。大的图像是直接显示启动摄像头后来自摄像头的画面,小的图像则是显示准备好回传给客户端的图像(因为压缩转格式的关系,导致相对于大的画面会有一定延迟) - 右上角是一堆滑块组件,两个功能:单独控制对应的舵机,实时显示来自客户端的控制指令中的舵机目标角度。 - 左下角是一个滚动信息窗口 - 右下角三个按键:“Acknowledge”按键用于验证通过USB连接的设备,“Reset robot arm”按键用于重置机械臂位置, “Connect”按键启动Http服务器功能。 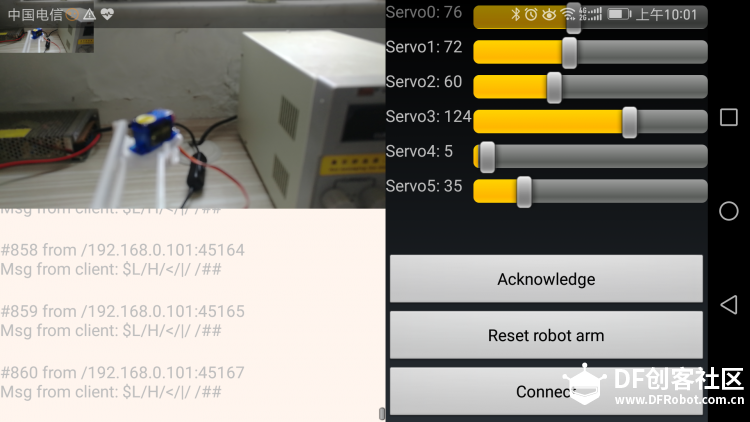 接下来是手臂动作捕捉的硬件。之前的帖子里面说过,主板上专门留了拓展接口,这次就是利用拓展接口改装了一下,增加了一个含两个数字按键的手柄。   现在来说说Demo中的另外一台手机。这台手机的软件是在Unity3D下面开发的,因为要用Cardboard的SDK开做成VR模式。软件架构大概是这样: 1. 集成Cardboard的SDK。软件就变成VR模式了。可以实时采集头部的转动,用头部的转动去控制机械臂上方的两个舵机,这样之前那台手机的转动就和这里的头部转动同步了。 2. 在Unity下,在头部(Main Camera)前面绑定一个半透明的Plane组件,接收到的回传图像就是显示在这。做成半透明,是为了不遮挡观察3D环境(如手臂模型和机械臂模型)。 3. 集成蓝牙BLE。通过蓝牙连接手臂动捕设备,实现虚拟手臂和现实手臂的同步。手柄上的按键可以调用一些简单功能。 4. 3D重构一个机械臂。这里不用做完全相同的重构,只要把完整的机械关系表现出来就可以了。 5. 机械臂的控制。没有用机械臂和手臂转动同步的方式来实现控制,这么做太麻烦,因为人的手臂和Demo中使用的机械臂没有任何对应关系。在3D环境中可以自主地去牵引机械臂的夹持器,实时测量虚拟机械臂关节处的转动,用这些数据去同步控制现实中的机械臂。  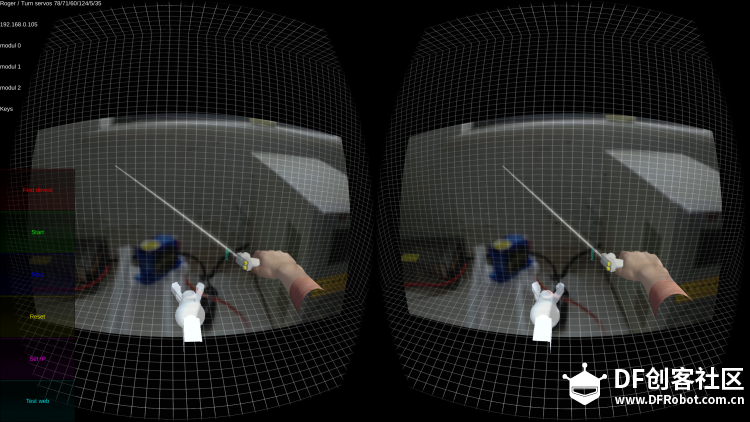 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









